SM421 Programming Tutorial(Chi Ver1)-.pdf - 第29页
Pr ogram(Chip ) 1-9 ( 第二个基准标记 ) <No> 列 基准点标记位置的序 列编号。 <X> 列 基准点标记的 X 坐标值 。 示教该标志后输入。 <Y> 列 基准点标记的 Y 坐标值。 示教该标志后输入。 <Mark> 列 基准标记的 Mark ID 。 此 数值在 <5. Mark 点列 > 的序列编号中设定。
Samsung Component Placer SM421 Programming Tutorial
2 Panel: 有 2 个基板的补偿用基准标记。
<2. 标记位置> 领域
<位置类型>不是”None”时,生成与所选择的基准标记数量同样的数据。例如,
选择”2 Panel”时,显示如下的画面。 在这里示教 Mark 中心。
利用基准相机示教 2 个 Fiducial Mark 的中心点并输入坐标值。
首先调节基准相机的照明,使 Fiducial Mark 变得鲜明清晰。
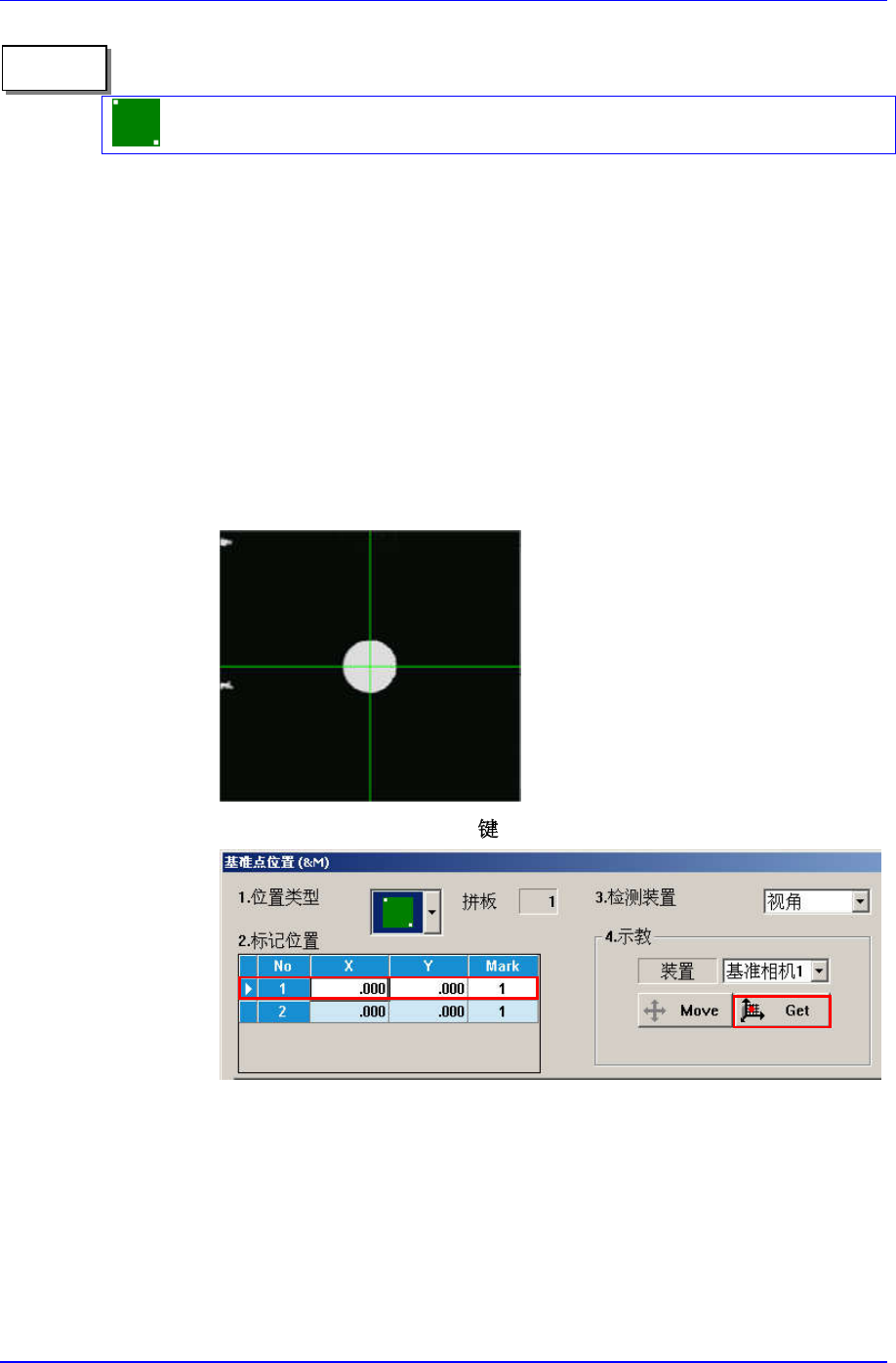
Fiducial Mark 示教顺序
在<4. 示教>领域的<装置>组合框选择”基准相机 1”。
利用示教框把贴片头的基准相机移动到需要示教的 Fiducial Mark 位
置。
磁头移动到 SMVision 窗的中心线(Cross hair)和 Fiducial Mark 中心点一
致为止。
(第一个基准标记)
单击<4. 示教>领域的<Get> ,把当前位置输入<2. 标记位置 >领域。
备 注
1-8
Program(Chip )
1-9
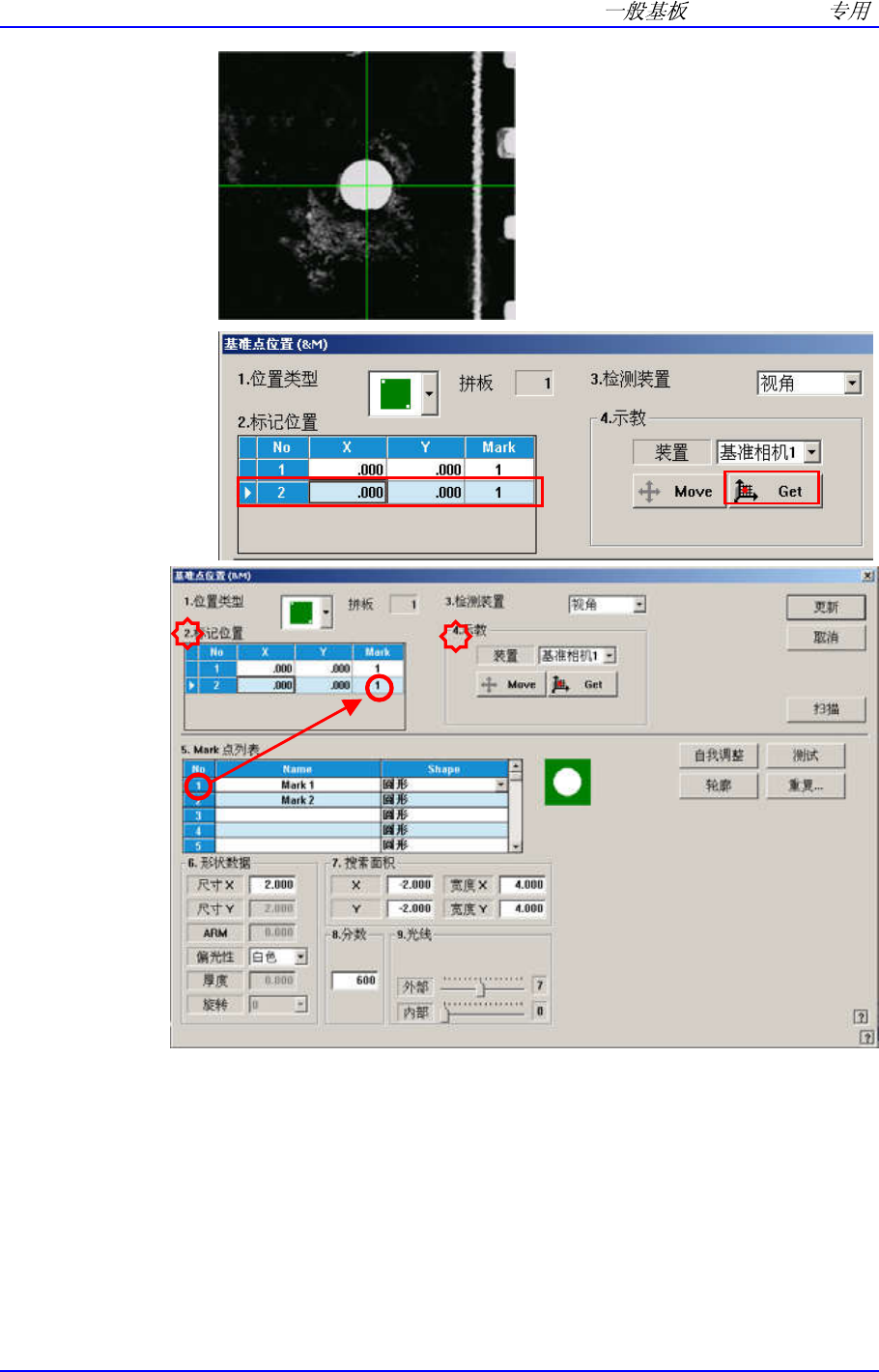
(第二个基准标记)
<No> 列
基准点标记位置的序列编号。
<X> 列
基准点标记的 X 坐标值。 示教该标志后输入。
<Y> 列
基准点标记的 Y 坐标值。 示教该标志后输入。
<Mark> 列
基准标记的 Mark ID。 此数值在<5. Mark 点列>的序列编号中设定。

Samsung Component Placer SM421 Programming Tutorial
<3. 检查装置> 组合框
设置成利用基准相机检查 Fiducial Mark。
<4. 示教> 领域
回转 XY 轴驱动电动机把 Fiducial Camera 移动到指定坐标位置,或用于获取 Fi
ducial Camera 的当前坐标。
<装置> 组合框
旋转 XY 轴驱动电动机选择移动到指定坐标位置的对象,或者获取所要选
择 Device 的当前坐标值时,选择该装置。
( 基准相机 1)
Fid Cam: 选择 Fiducail Camera。
<Move> 按钮
<装置> 组合框中选择的对象移动到指定的坐标值。此时,点击 <Move>
按钮之前,用鼠标点击相应位置的 grid cell(Fiducial Mark 坐标)。
<Get> 按钮
<装置> 组合框中选择的对象为基准获取 X, Y 坐标。此时,点击 <Get>
按钮之前,用鼠标点击相应位置的 grid cell(Fiducial Mark 坐标)。
<5. Mark 点列表> 领域
基准点标记形状数据的清单。 在这里创建 Fiducial Mark 的名称并选择形状。
( Circle )
<No> 列
基准点标记形状的序列编号。
<Name> 列
基准点标记的名称。(最多 10 字)
<Shape> 列
选择基准点标记的形状。
园: 圆形 基准点标记。
<Camera> 列
选择检查基准点标记用摄象机。现在固定为”移动相机”。
<6. 形状数据> 领域
它是有关基准标记形状的数据。
<尺寸 X> 编辑框
设定基准标记的 X 轴方向尺寸。(以设备的坐标系为准)
在这里基准标记的类型为圆形(Circle),因此它相当于直径大小。单击<轮廓
>键,检查显示器上的 Fiducial Mark 与设置的圆大小是否一致。如果不一
致,应修改 X 方向大小(直径)以使其一致。
<方向性 偏光性> 组合框
1-10