SM421 Programming Tutorial(Chi Ver1)-.pdf - 第31页
Pr o gram(Chip ) 1-1 1 选择基准点标记的颜色。可选择的 颜色如下。 ( 选择 White ) 白色 : 标记比周边亮的 情况。 黑色 : 标记比周边暗的 情况。 < 厚度 > 编辑框 设 定 基 准 点 标 记 的 厚 度 。 0 时 , 基 准 点 标 记 为 饱 满 的 情 况 。 ( 在 这 里 输 入 ” 0 ” ) <7. 搜索面积 > 领域 设定需检查基准标记的领域。…

Samsung Component Placer SM421 Programming Tutorial
<3. 检查装置> 组合框
设置成利用基准相机检查 Fiducial Mark。
<4. 示教> 领域
回转 XY 轴驱动电动机把 Fiducial Camera 移动到指定坐标位置,或用于获取 Fi
ducial Camera 的当前坐标。
<装置> 组合框
旋转 XY 轴驱动电动机选择移动到指定坐标位置的对象,或者获取所要选
择 Device 的当前坐标值时,选择该装置。
( 基准相机 1)
Fid Cam: 选择 Fiducail Camera。
<Move> 按钮
<装置> 组合框中选择的对象移动到指定的坐标值。此时,点击 <Move>
按钮之前,用鼠标点击相应位置的 grid cell(Fiducial Mark 坐标)。
<Get> 按钮
<装置> 组合框中选择的对象为基准获取 X, Y 坐标。此时,点击 <Get>
按钮之前,用鼠标点击相应位置的 grid cell(Fiducial Mark 坐标)。
<5. Mark 点列表> 领域
基准点标记形状数据的清单。 在这里创建 Fiducial Mark 的名称并选择形状。
( Circle )
<No> 列
基准点标记形状的序列编号。
<Name> 列
基准点标记的名称。(最多 10 字)
<Shape> 列
选择基准点标记的形状。
园: 圆形 基准点标记。
<Camera> 列
选择检查基准点标记用摄象机。现在固定为”移动相机”。
<6. 形状数据> 领域
它是有关基准标记形状的数据。
<尺寸 X> 编辑框
设定基准标记的 X 轴方向尺寸。(以设备的坐标系为准)
在这里基准标记的类型为圆形(Circle),因此它相当于直径大小。单击<轮廓
>键,检查显示器上的 Fiducial Mark 与设置的圆大小是否一致。如果不一
致,应修改 X 方向大小(直径)以使其一致。
<方向性 偏光性> 组合框
1-10

Program(Chip )
1-11
选择基准点标记的颜色。可选择的颜色如下。 (选择 White)
白色: 标记比周边亮的情况。
黑色: 标记比周边暗的情况。
<厚度> 编辑框
设定基准点标记的厚度。 0 时,基准点标记为饱满的情况。 (在这里输
入”0” )
<7. 搜索面积> 领域
设定需检查基准标记的领域。它的主要使用目的为在一些特殊的 PCB 的周围有
类似标记的形状而防碍识别时,限定其检查范围。
<X> 编辑框
设定在 X 轴的方向检查基准点标记的开始位置。
SM Vision 中央为零,一般设置为 Fiducial Mark 的 X 方向大小(Size X)的负
(-)值。
<Y> 编辑框
设定在 Y 轴的方向检查基准点标记的开始位置。视觉 监视画面的中央为
0。 SM Vision 中央为零,一般设置为 Fiducial Mark 的 X 方向大小的(Size
X)负(-)值。
<宽度 X> 编辑框
设定在 X 轴的方向的检查范围。 一般设置为<7. 搜索面积> 领域的 <X>
编辑框中设定值的 2 倍。
<宽度 Y> 编辑框
设定在 Y 轴的方向的检查范围。 一般设置为 <7. 搜索面积>领域的 <Y>
编辑框中设定值的 2 倍。
<8. 参数> 领域
基本上,超过 600(基本值)才可以得到正确的补偿。最差时也要 300 以上。 (60
0 )
<9. 亮度> 滑动条
设定检查基准点标记时的照明度。一般设定为 7。实际的使用
当中,根据基板和 Fiducial Mark 的状态可以适当调整照明度。
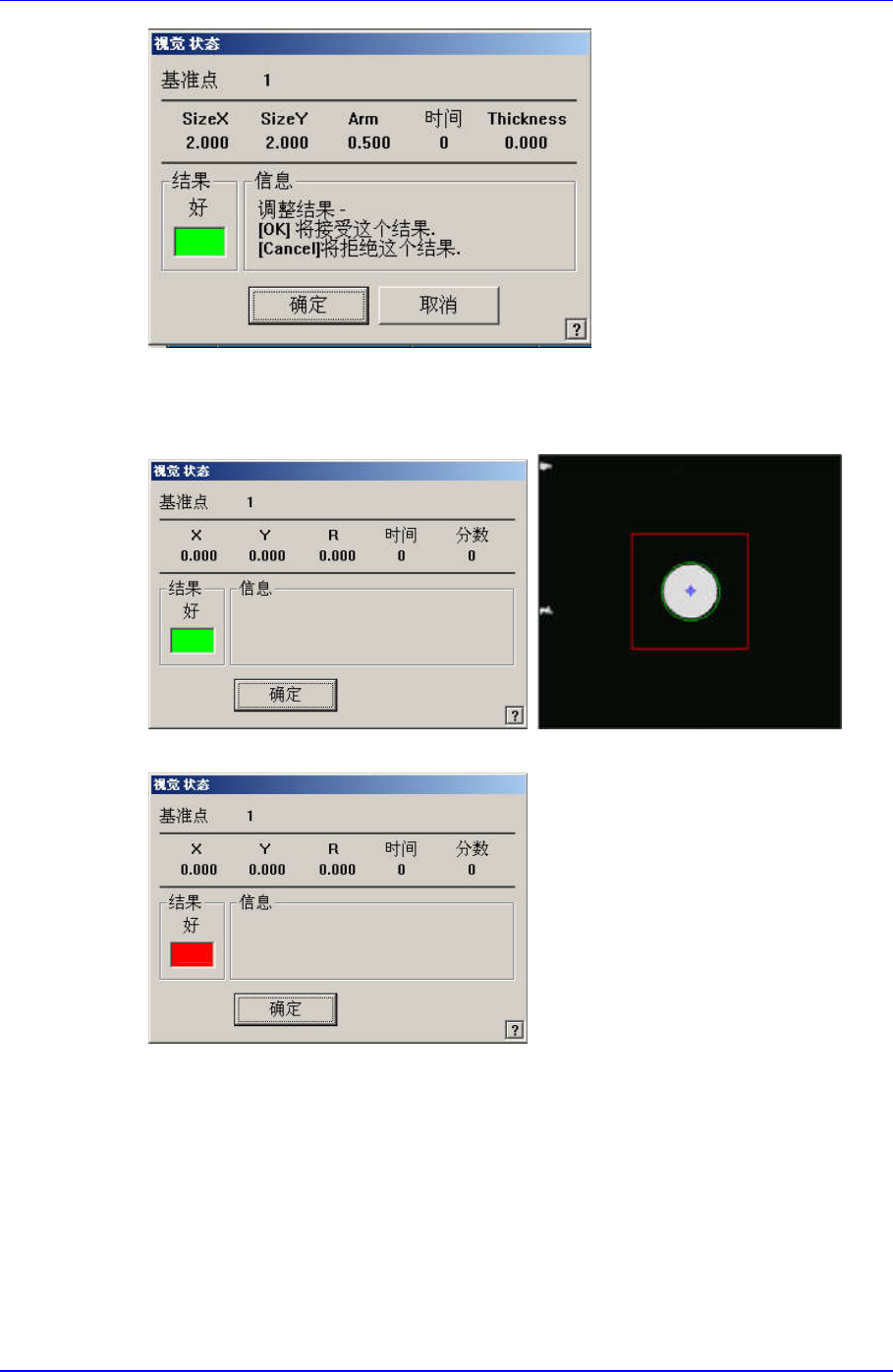
<自我调整> 按钮
利用已设定的数据计算实际标记的尺寸。算出实际标记的尺寸后显示以下的信
息框。尺寸需要变更为新找的数据时,按下<是>按钮,不需要时按下<不是>按
钮。 为了输入准确的数值,请执行一次以上。
Samsung Component Placer SM421 Programming Tutorial
<测试> 按钮
利用已设定的标记的数据检查标记。通过它可以确认设定值是否正确。成功地
结束检查后显示以下的信息框。
检查失败时,显示以下的信息框。
<扫描> 按钮
进行对已设定的基准标记的扫描测试。扫描测试利用已设定的基准标记的位置
和标记数据检查实际的标记。其结果如下。
1-12