52986107 中文版教学.pdf - 第76页
BEC 调校 本文档支持 VCD/ 排序机。 第 72 页,共 88 页 52986107 修订版 AV C D / 排序机调校指南 传感器的初步调整 要对传感器执行机械调整,请执 行以下步骤: 1. 拧松用于将调整支架固定到桥座 的 2 颗凹头螺丝。 2. 拧松用于将调整支架固定到传感 器支座的 2 颗固定螺丝。 a. 通过逆时针旋转 Y 调整螺丝来调整 Y 方向的传感器,直至 Y A/D (模 拟 / 数字) 计数读数约为 +20 …
BEC 调校
第
71
页,共
88
页
VCD/ 排序机调校指南 52986107 修订版 A
本文档支持 VCD/ 排序机。
5. 如果显示消息 About to Zero Elevators(将要归零升降机),则 选 择 Cancel
(取消)
。
6. 在显示
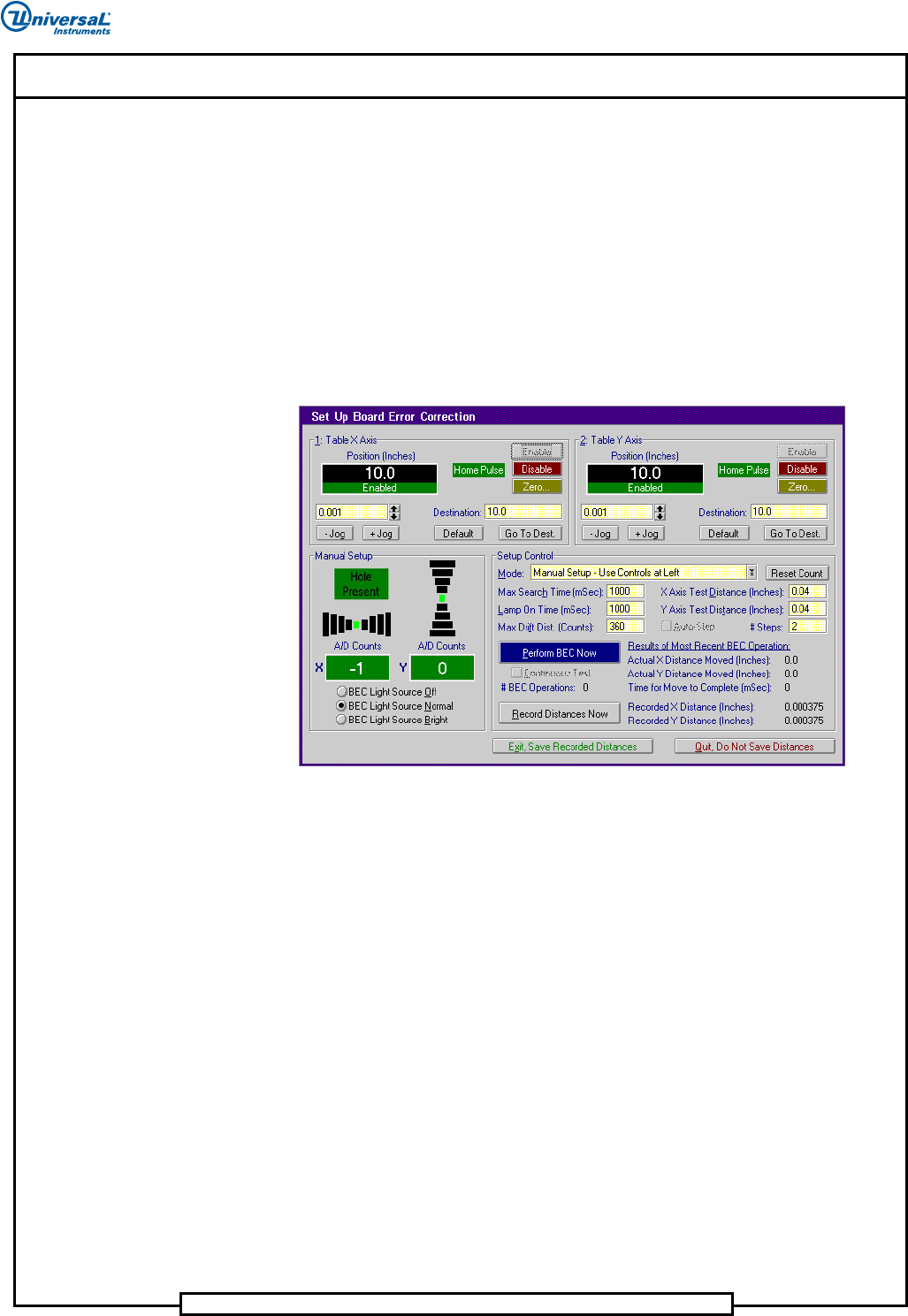
Finished(完成)消息时,选择 OK(确定)。随即显示 Set Up Board
Error Correction (调校板偏差校正)屏幕。
7. 验证下列设置:
a. Setup Control(调校控制)部分 - 选中 Mode: Manual Setup - Use Controls at
Left (模式:手动调校 - 使用左侧控件)
b. Manual Setup(手动调校)部分:选择 BEC Light Source Normal(BEC 光源
正常)
按钮
8. 如果
Manual Setup(手动调校)部分的 X and Y axis A/D Counts(X 和 Y 轴 A/
D (数字 / 模拟)计数)
读数:
a. 在 0 ±1 范围内并且显示
Hole Present(孔出现)指示器,则继续执行
第 73 页的 “ 建立传感器偏移量 ”。
b. 大于 0 ±1 或者未显示
Hole Present (孔出现)指示器,则继续执行下一
步骤。
9. 如果 BEC 模板中的孔不在 BEC 传感器范围 (0 ±1) 以内,那么 BEC 组件上
的 X 和 Y 轴需要调整。
使用第 72 页的 “ 传感器的初步调整 ” 步骤进行调整,直至
Set Up Board
Error Correction (调校板偏差校正)
屏幕的 Manual Setup (手动调校)部分出
现
Hole Present (孔出现)消息。
当出现
Hole Present (孔出现)消息时,查看计数:它们应该在 0 ±1 范围
以内。 ±1 是可接受的读数。
步骤结束。
BEC 调校
本文档支持 VCD/ 排序机。
第
72
页,共
88
页
52986107 修订版 AVCD/排序机调校指南
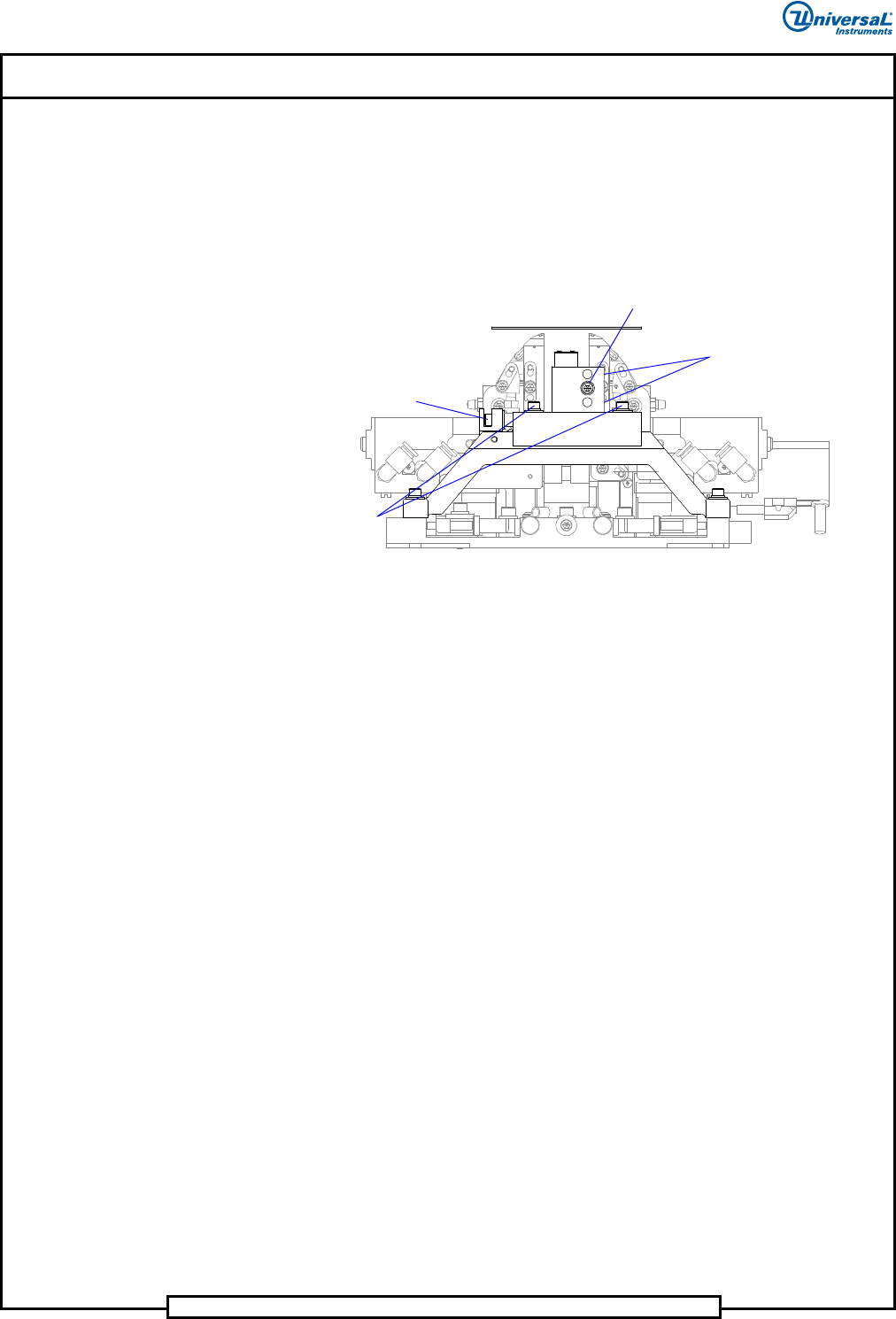
传感器的初步调整
要对传感器执行机械调整,请执行以下步骤:
1. 拧松用于将调整支架固定到桥座的 2 颗凹头螺丝。
2. 拧松用于将调整支架固定到传感器支座的 2 颗固定螺丝。
a. 通过逆时针旋转 Y 调整螺丝来调整 Y 方向的传感器,直至 Y A/D (模
拟 / 数字)计数读数约为 +20。确保 Hole Present(孔出现)指示器仍旧
可见。
b. 通过顺时针旋转 X 调整螺丝来调整 X 方向的传感器,直至 X A/D (模
拟 / 数字)计数读数约为 +20。确保 Hole Present(孔出现)指示器仍旧
可见。
3 拧紧固定螺丝和凹头螺丝,将传感器支座固定到位。必须将这些螺丝拧到
足够紧,以保持传感器位置,但不要过紧,以免调整螺丝无法根据下一步
中的描述移动传感器。如果这些螺丝过紧,可能很难执行下一步骤。
步骤结束。
微调传感器
此步骤旨在将 BEC 传感器恢复调整状态。
注意事项
• 在向一个方向调整传感器时,另一个方向的 A/D (模拟 / 数字)计数读
数可能会发生轻微变化。只要最终的 X 和 Y A/D(模拟 / 数字)计数读
数在 0 ±1 范围内,就没有问题。
• 任何时候,如果 A/D(模拟 / 数字)计数读数大于 +1,表明传感器在正
方向移动过远。重复步骤第 72 页的 “ 传感器的初步调整 ”。
步骤
要微调传感器,请执行以下步骤:
Set Screws
X Adjusting Screw
Y Adjusting Screw
Socket Head
Cap Screws
X 调整螺丝
凹头螺丝
Y 调整螺丝
固定螺丝
BEC 调校
第
73
页,共
88
页
VCD/ 排序机调校指南 52986107 修订版 A
本文档支持 VCD/ 排序机。
1. 顺时针旋转 Y 调整螺丝,直至 Y A/D (模拟 / 数字)计数读数约为初步调
整设置值的一半 (大约 -8 到 -10)。
例如:
如果之前的设置为 -20,则使用 -8 或 -10。
如果之前的设置为 -22,则使用 -10 或 -12。
2. 逆时针旋转 X 调整螺丝,直至 X A/D (模拟 / 数字)计数读数约为初步调
整设置值的一半 (大约 -8 到 -10)。
3. 顺时针旋转 Y 调整螺丝,直至 Y A/D (模拟 / 数字)计数读数为 0 ±1。
4. 逆时针旋转 X 调整螺丝,直至 X A/D (模拟 / 数字)计数读数为 0 ±1。
5. 小心地拧紧固定螺丝和凹头螺丝,将传感器支座固定到位。
在拧紧固定螺丝和螺丝后,如 X 和 Y A/D (模拟 / 数字)计数所示,对正
可能会受到影响。如果 X 和 Y A/D (模拟 / 数字)计数保持在 0 ±1 范围
内,则调整可以接受。
步骤结束。
建立传感器偏移量
要建立传感器偏移量,请执行以下操作:
1. 在
Setup Control (调校控制)部分选择 Perform BEC Now (立即执行 BEC)
按钮。随即执行 BEC 校正。
如果显示 BEC 错误消息 “
Time-out” (超时)或 “No Hole” (没有孔),
则重复步骤第 72 页的 “ 传感器的初步调整 ”。然后,再次启动此步骤。
超时错误 – 此错误在轴无法在计算的超时限制内达到指定目标时发生。
此时间限制以速度和加速度为基础。与 DAC(数字模拟转换)极限错误
一样,这通常是由于某种东西粘结或阻碍轴运动引起的。
没有孔错误 – 这意味着找不到指定孔位置的孔。
2. 选择
Record Distances Now (立即记录距离)按钮以获取 X 和 Y 校正值。
这些校正将显示在
Recorded X Distance (记录的 X 距离)和 Recorded
Y distance (记录的 Y 距离)
字段中;在结束此步骤并保存校正值时,它们会
自动用于校正程式偏差量。
3. 选择
Setup Control (调校控制)部分的 Mode (模式) : 下拉列表,并选择
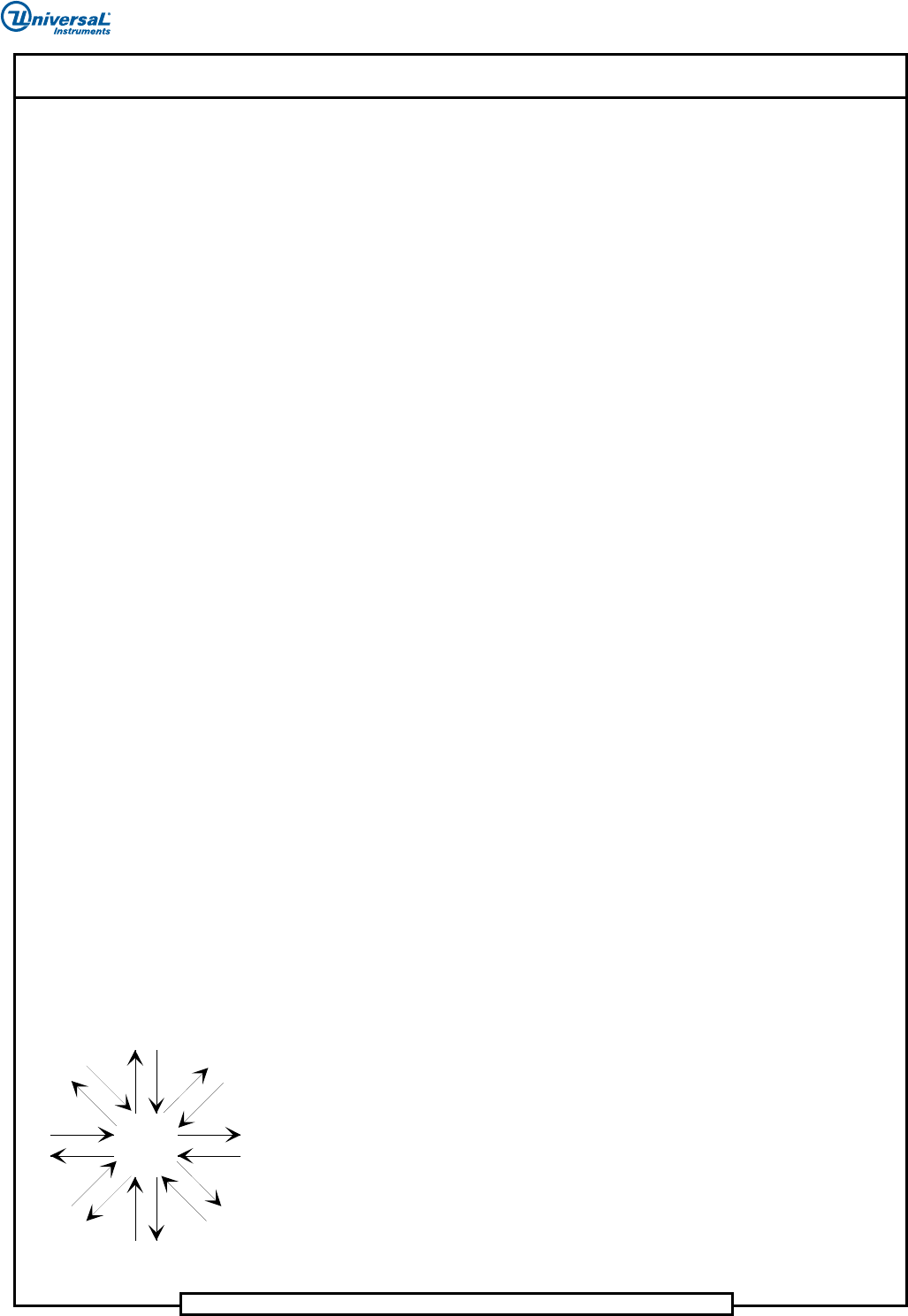
Test X and Y, 45 Degree Increments (测试 X 和 Y, 45 度增量)。
这将引起定位系统 8 个位置的移动。
4. 将
Setup Control(调校控制)部分的 # Steps(步数): 输入字段从 2 更改为 8。
此值允许 BEC 系统获取 BEC 模板孔周围的多个读数 (如图所示)。更多
信息,请参考
第
70
页的
“BEC
调校
” 部分。
5. 选择
Perform BEC Now (立即执行 BEC)。这将引起 X 和 Y 轴移动,并执
行指定的功能。
1
2
3
4
5
6
7
8
0