SM481(L)_Admin.pdf - 第273页
8-27 供应装置的设置 (7) 点击 <G et> 键, 填入拼块 的数值。 (8) 点击 <Apply> 键, 如下图所 示, 可以获得最终的 Pitch 数值。 但是, 如 果已经知道的拼块 Pitch 数值, 可以省略 (6) ~ (8) 的过程, 在 窗口内直 接输入。 < 使用 JEDEC DB> < 选择 > 按钮 带来从 JE DEC T ray DB 正在作业的多…
8-27
供应装置的设置
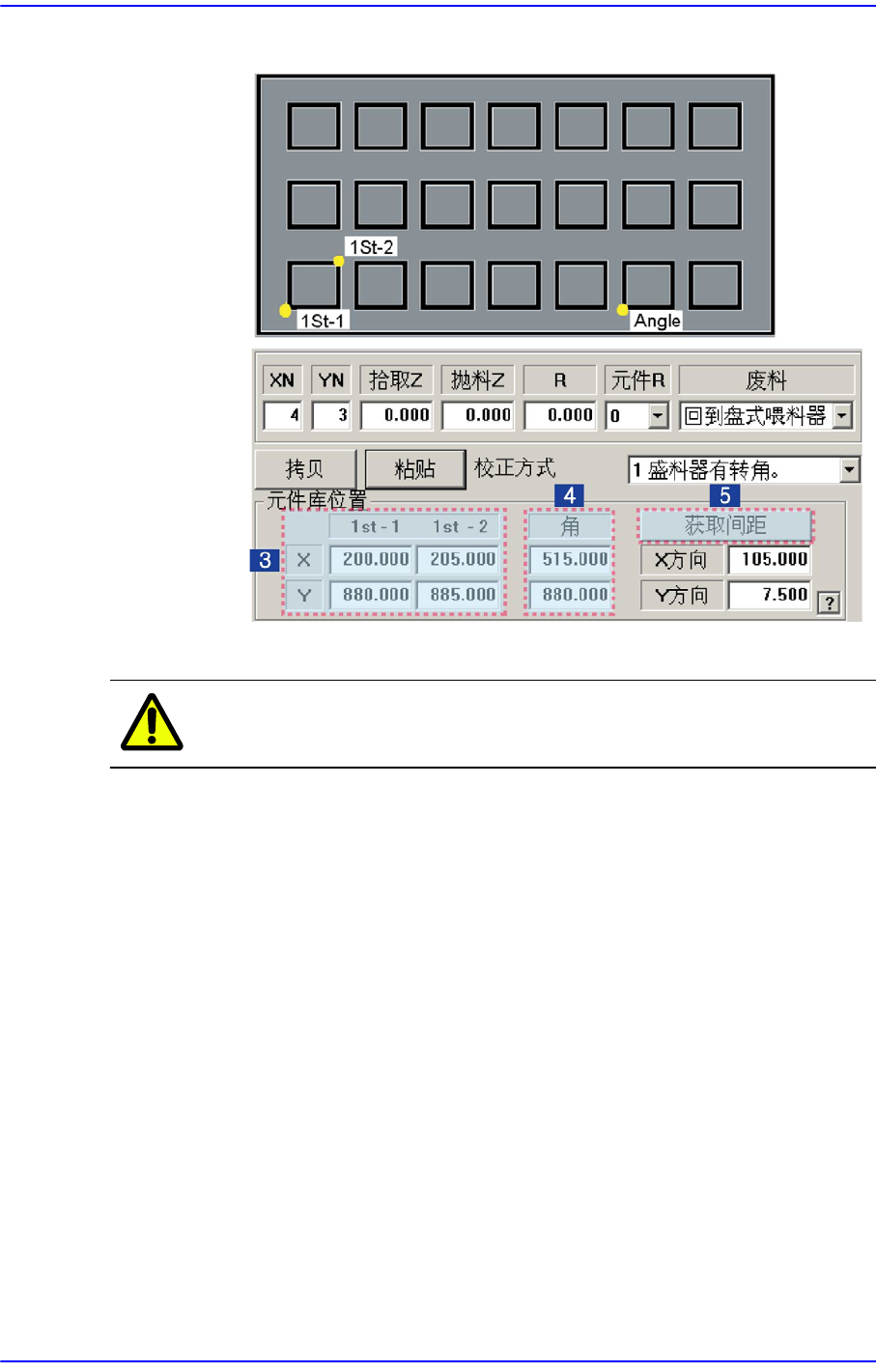
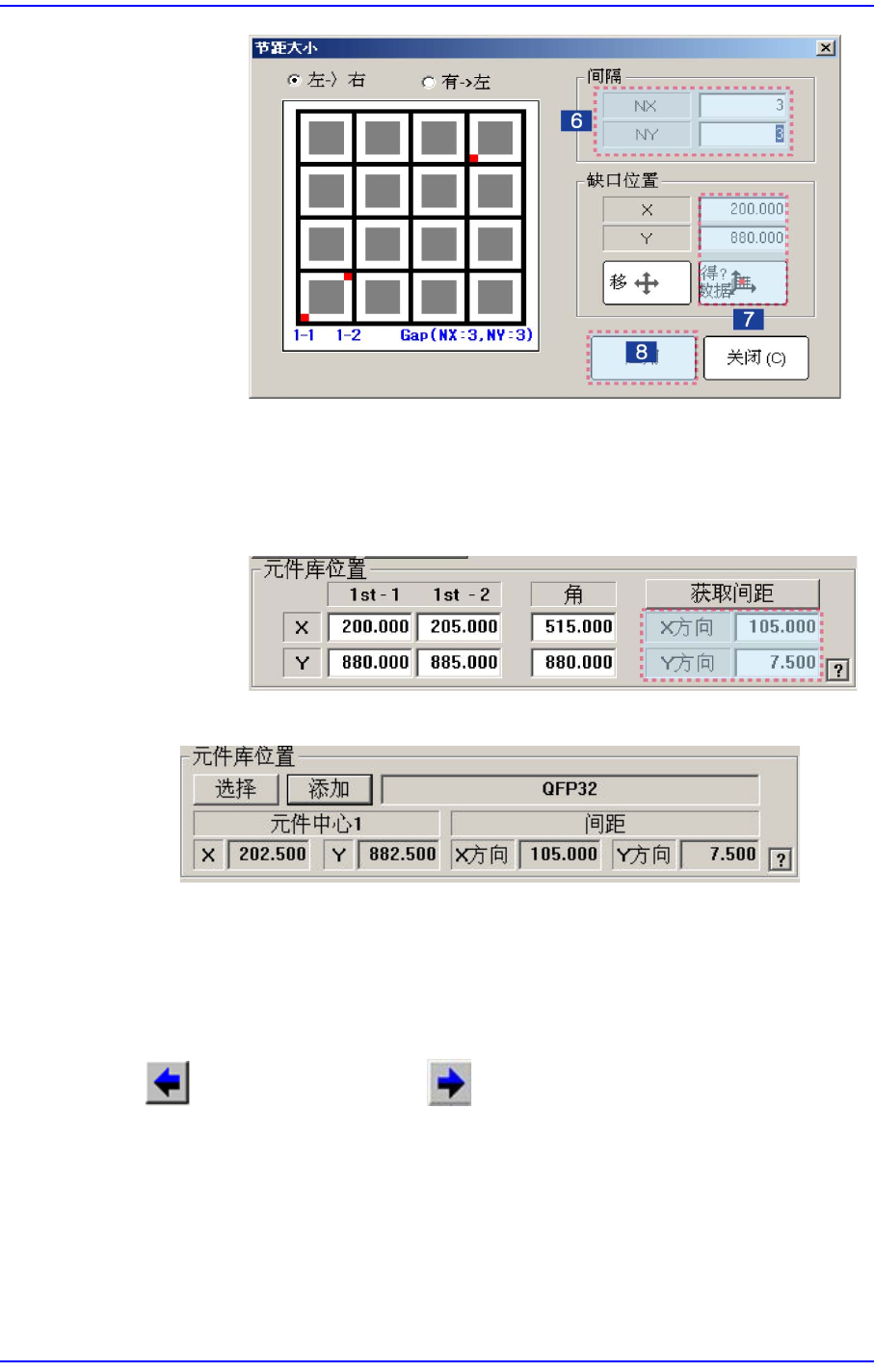
(7) 点击 <Get>键,填入拼块的数值。
(8) 点击<Apply>键,如下图所示,可以获得最终的 Pitch数值。但是,如
果已经知道的拼块Pitch数值,可以省略 (6)~(8)的过程,在窗口内直
接输入。
<使用JEDEC DB>
<选择> 按钮
带来从JEDEC Tray DB正在作业的多盘式信息。
<单位> 领域
选择将要编辑的盘式。
此按钮选择前一个单位, 此按钮选择下一个单位。
<单位类型> 标题框
表示已选择的盘式的形式。该盘式的形式应设定在系统中。
<用二个多盘> 选择框
要在一个Pallet放置2 个Tray 使用,则作出确认标记。 本设备中无法使用。
<盘子出来> 按钮
8-28
Fast Flexible Placer SM481(L) Administrator’s Guide
从Tray Feeder Elevator放出要操作的Pallet。适用于自动Tray feeder的功能。
<盘子回去 > 按钮
要结束当前正在运行的Pallet操作时用Tray Feeder Elevator插入。 适用于自动
Tray feeder的功能。
<示教> 领域
用于回转XY 轴驱动电动机,把已选对象移动到指定的坐标位置或用于获取已选
对象的当前坐标值。
按钮
示教时设置所要使用的基准相机的照明。详细事项请参照 “7.1.1
共同
Align
Data (7-15
页
)”。
组合框
用于旋转XY轴驱动电动机选择要移动到指定坐标位置的对象或用于选择所
要获取当前坐标的对象。可选择的对象如下。
基准相机(Option): 选择头部的基准相机。
头1 ~ 头10: 选择1号~10号 Head
<移动> 按钮
组合框中选择的对象移动到指定的坐标位置。 运行 “移动”按钮之前,先要
用鼠标单击需要移动的位置对应的Grid 领域 (Tray Feeder的吸附点坐标)。
<得到> 按钮
组合框中选择的对象为基准获取 X, Y 坐标。 运行 “得到”按钮之前,先要用
鼠标单击需要移动的位置对应的 Grid 领域 (Tray Feeder的吸附点坐标)。
<Shuttle Supply>键
如果是Shuttle Tray Feeder,巡回台(Shuttle)从盘式供料器(Tray Feeder)得到元器
件后移动到拾取(Pick Up)位置。
<Pallet Out > 按钮
从Tray Feeder Elevator放出要操作的Pallet。适用于自动Tray feeder的功能
<Pallet In > 按钮
要结束当前正在运行的Pallet操作时用Tray Feeder Elevator插入。 适用于自动
Tray feeder
的功能。
<Z Teach> 按钮
利用空压自动测定对Feeder吸附点的Z轴高度。 在HEAD的喷嘴槽插入CN040
喷嘴后在“ 喂料器底座”TAP 对话框的<Grid>领域选择要测定Z轴高度的带式喂
料器,然后点击<移动 >按钮。