SI-P850_使用说明书.pdf - 第109页
操作篇 11.机械调整 SI-P850 (CS) 1-81 ⑤ θ轴在–方向自动旋转,照相机返回,拍摄基点 1 的影像。用按钮操作调整在画面上显示整个基 点,并按 确定 。 照相机移动,并拍摄基点2的影像,执行自动认识。 在本步骤中计算旋转中心和θ原点的角度。 ⑥ 输送带的轨道宽度返回到机种情报中登录的值。 ⑦ 返回到第一个画面,显示资料内容。按 登录 更新资料。 相位 2 设定挡块搬入基板的偏移量,并检查上钢网边缘和基板边缘的位置,以…
操作篇
11.机械调整
1-80 SI-P850 (CS)
(2)实行校正
选择相位 1、相位 2 或相位 3,然后按开始 。
按顺序显示指示 ,依此按 确定 ,实行校正。
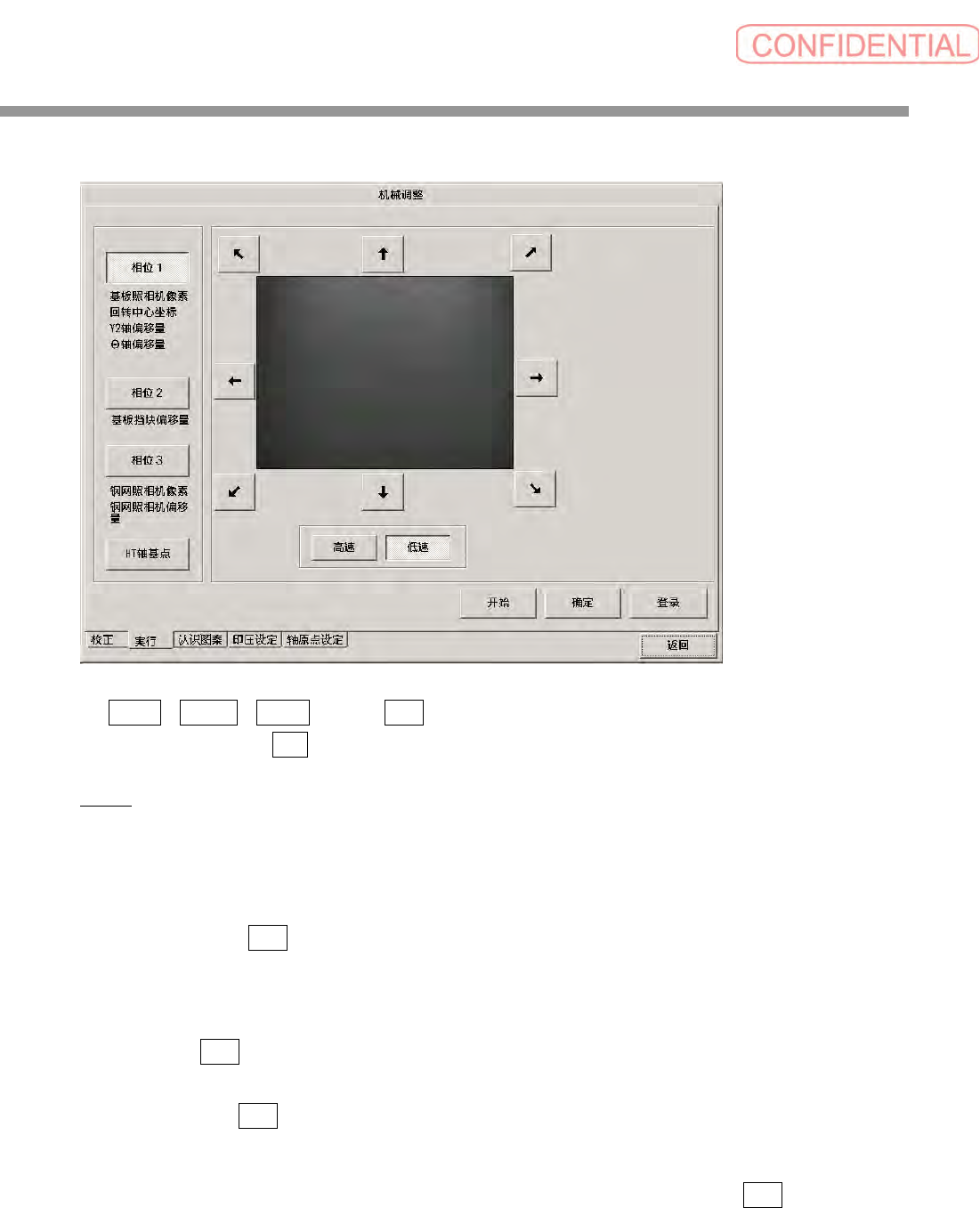
相位 1
① 输送带轨道宽度调整为274mm。
轨道宽度超过274mm时,设定支撑治具,然后取下治具。
② 治具的基点1通过P照相机显示在监视画面上。通过按钮操作调整照相机,在画面上显示整个基
点1,然后按 确定 。
P照相机自动认识基点,并计算像素尺寸。
③ 基点1的上边通过P照相机显示在监视画面上。通过按钮操作调整照相机,在画面上显示边缘,
然后按 确定 。
照相机移动到右侧,并拍摄侧边的影像。如果画面上没有显示边缘,则应通过按钮操作,显示
之,然后按 确定 。
查看θ的倾斜度,设定原点。
④ θ轴在+方向自动旋转,显示基点1。用按钮操作调整显示整个基点,并按 确定 。
照相机移动,并拍摄基点2的影像,执行自动认识。
操作篇
11.机械调整
SI-P850 (CS) 1-81
⑤ θ轴在–方向自动旋转,照相机返回,拍摄基点 1 的影像。用按钮操作调整在画面上显示整个基
点,并按 确定 。
照相机移动,并拍摄基点2的影像,执行自动认识。
在本步骤中计算旋转中心和θ原点的角度。
⑥ 输送带的轨道宽度返回到机种情报中登录的值。
⑦ 返回到第一个画面,显示资料内容。按 登录 更新资料。
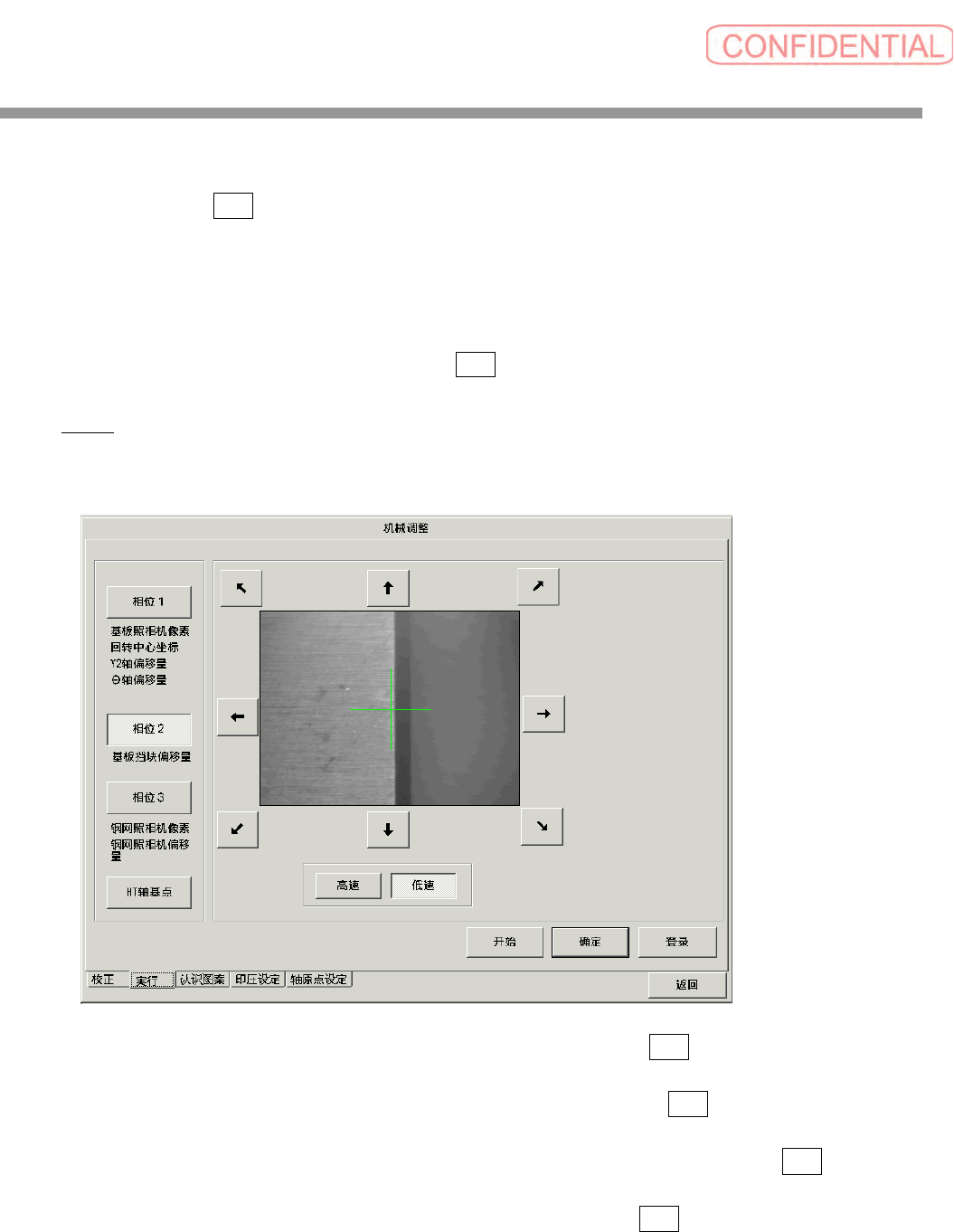
相位 2
设定挡块搬入基板的偏移量,并检查上钢网边缘和基板边缘的位置,以及基板在 XY 工作台中心的
位置。
① 监视画面上显示上钢网的左侧边缘。将边缘对准标记+,并按 确定 。
② 照相机移动,显示基板的边缘。将边缘对准显示的标记+,并按 确定 。
③ 以同样的方式,将基板的左侧边缘和上钢网的边缘与显示的+标志对正,并按 确定 。
④ 计算挡块偏移量后,返回到第一个画面,显示资料内容。按 登录 更新资料。
操作篇
11.机械调整
1-82 SI-P850 (CS)
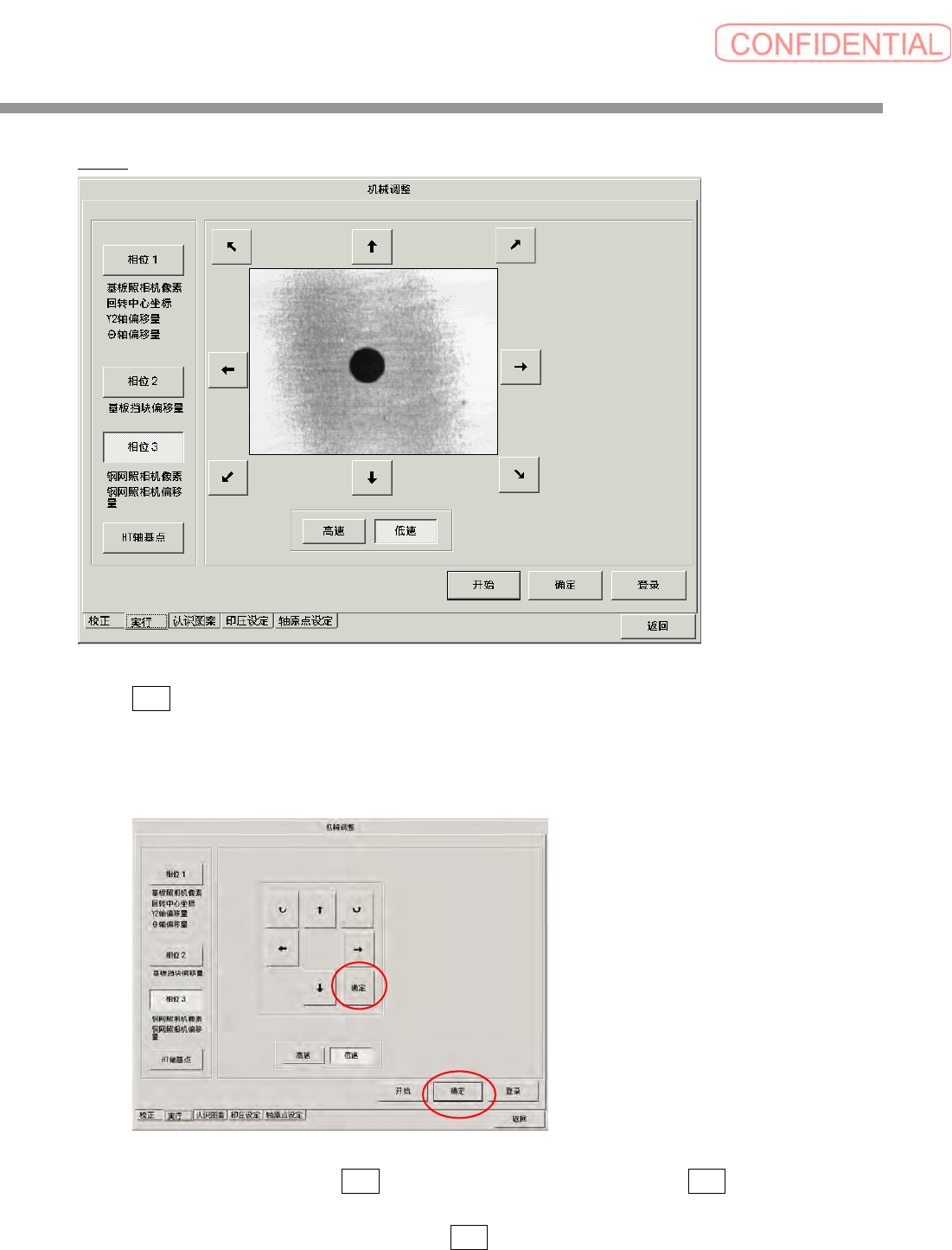
相位 3
① 钢网的基点1通过S照相机显示在监视画面上。用按钮操作调整在画面上显示整个基点,并按
确定 。
S照相机自动认识基点,并计算像素尺寸。
② 认识钢网和基板的基点。XY工作台上升,在触摸屏上显示按钮。
用这些按钮调整基板和钢网的位置。
③ 调整好上述位置时,按① 确定 。XY工作台下降。按画面右下角的② 确定 结束。
④ 返回到第一个画面,显示资料内容。按 登录 更新资料。
①
②