SI-P850_使用说明书.pdf - 第76页
操作篇 6.机种情报项目 1-48 SI-P850 (CS) 6-3 . 印刷条件 ① 印刷压力 设定每个刮刀头的印刷压力。 ② 刮刀速度 设定印刷过程中刮刀的移动速度。 ③ 印刷偏移量 印刷时,X、Y 和θ轴的偏移量。 在更换机种的定位过程中设定这些值。 ④ 刮刀偏移量 设定偏移量,修正由于刮刀位置不准造成的 Y 轴印刷位置偏移。 ⑤ 刮刀超過限制 设定刮刀移动的附加距离。 ⑥ 离网方式 选择印刷后,基板脱离钢网的操作。 等速度 : …
操作篇
6.机种情报项目
SI-P850 (CS) 1-47
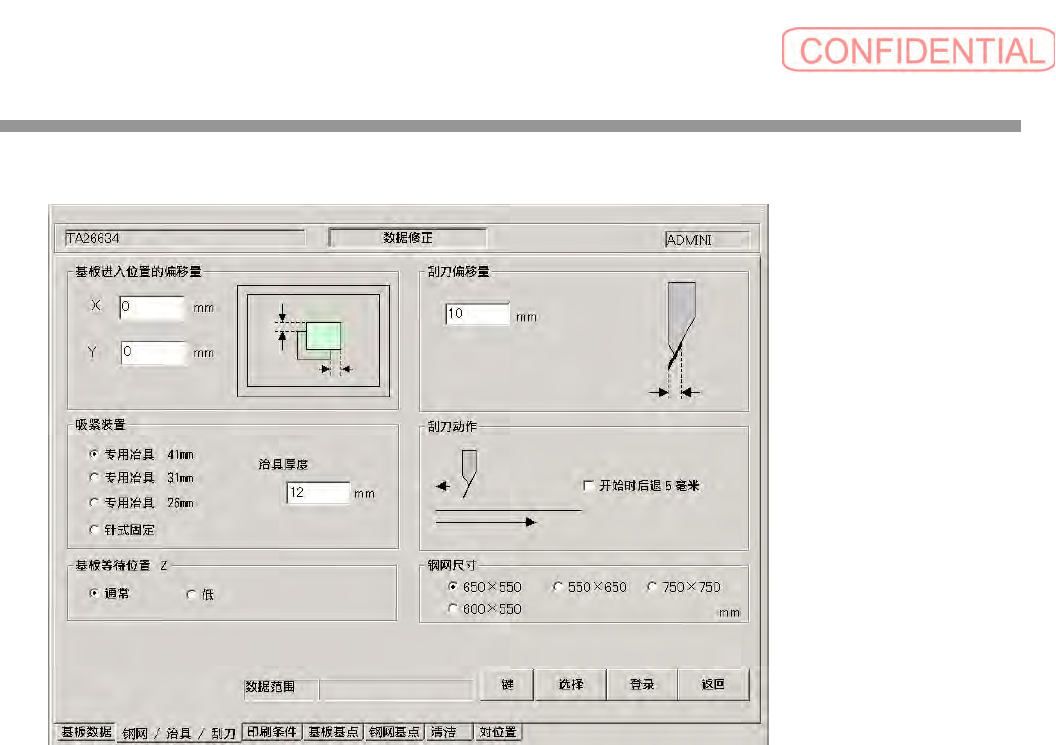
6-2. 钢网、治具和刮刀
① 基板进入位置的偏移量
当蒙片没有定位在钢网中央时,修正其位置。
注意,如果指定“X”的话,基板在工作台上的位置会变更。
② 吸紧装置
选择使用专用治具或是针式固定。
此外,选择专用治具时,选择治具高度,并指定吸紧治具的厚度。
③ 刮刀偏移量
设定刮刀架中心相对刮刀头的偏移量。
④ 刮刀动作
选择复选块时,在打开印压前,刮刀后退 5mm。
⑤ 基板等待位置 Z
搬入基板时,当基板到达感应器因为治具发白而对基板治具有反应时,选择低。
等待基板的位置变为 5mm 以下。
⑥ 钢网尺寸
选择使用的钢网的尺寸。
清洗块移动的限制范围会因此发生变化(清洁布类型)。
②
③
④
①
⑤
⑥
操作篇
6.机种情报项目
1-48 SI-P850 (CS)
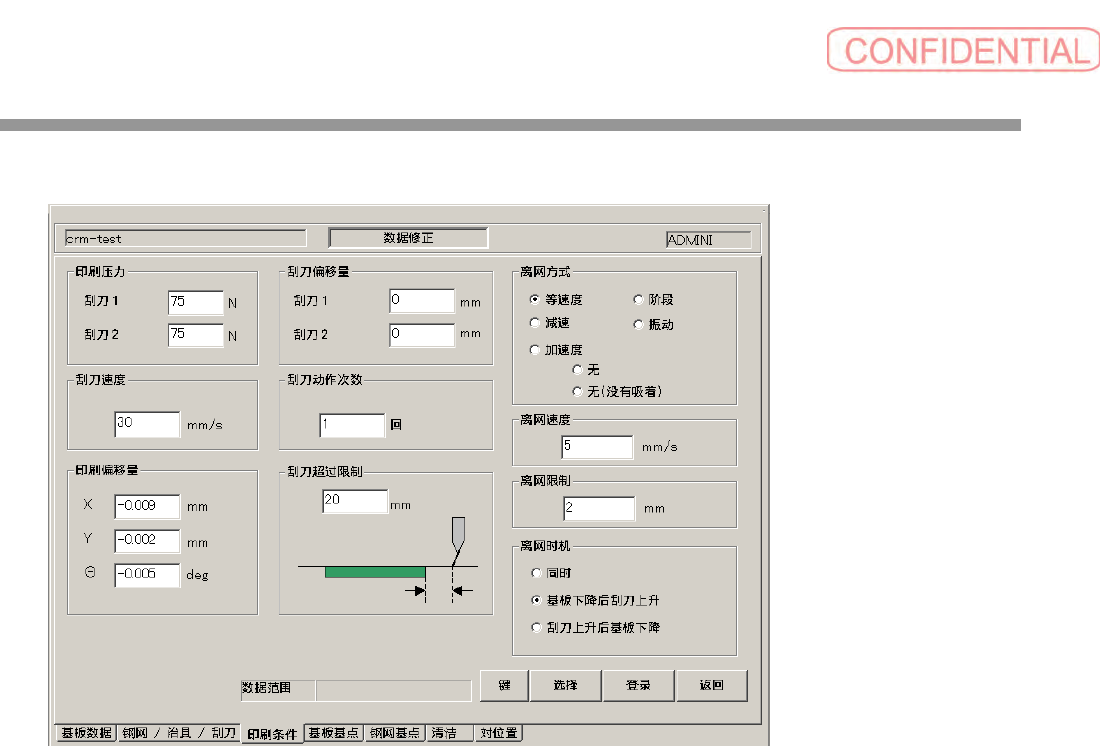
6-3. 印刷条件
① 印刷压力
设定每个刮刀头的印刷压力。
② 刮刀速度
设定印刷过程中刮刀的移动速度。
③ 印刷偏移量
印刷时,X、Y 和θ轴的偏移量。
在更换机种的定位过程中设定这些值。
④ 刮刀偏移量
设定偏移量,修正由于刮刀位置不准造成的 Y 轴印刷位置偏移。
⑤ 刮刀超過限制
设定刮刀移动的附加距离。
⑥ 离网方式
选择印刷后,基板脱离钢网的操作。
等速度 : 匀速降低基板。
减速 : 减速降低基板。
加速度 : 加速降低基板。
阶段 : 以小的夹紧量反复降低和停止。
振动 : 少量上下移动,然后匀速降低基板。
无 : 不通过 Z 轴进行基板下降、XY 工作台下降。
无(没有吸着) : 基板处于没有吸着状态时,不通过 Z 轴进行基板下降、XY 工作台下降。
⑦ 离网速度、限制
设定离网过程中降低基板的速度和限制。
⑧ 离网时机
选择离网和刮刀上升的顺序。
①
②
③
④
⑤
⑥
⑦
⑧
操作篇
6.机种情报项目
SI-P850 (CS) 1-49
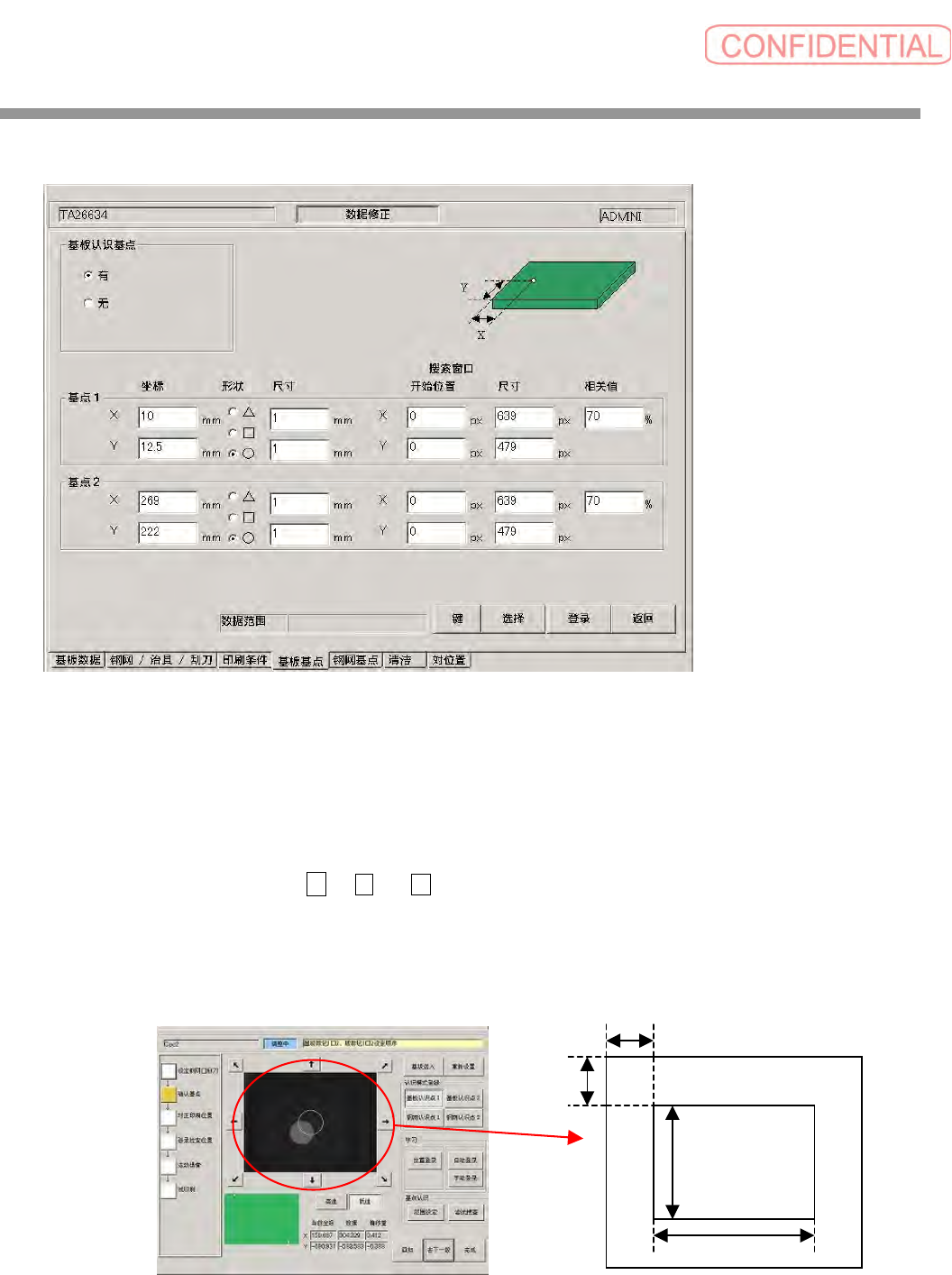
6-4. 基板基点
① 基板认识基点
选择是否在基板上运行基点识别。
② 基点 1·基点 2
设定两个识别基点。对于每个基点,设定如下项目。
坐标 :指定基板的左下角 X 和 Y 位置的坐标值为原点。
形状 :从 U 、 和 c 中选择基点的形状。
学习时,将会显示用于定位。
尺寸 :设定基点的尺寸。
指定作为认识基点登录的面积。
搜索窗口 :指定开始位置和尺寸,设定在照相机图像上搜查的面积。
相关值 :相关值,将作为图案匹配 OK(好)和 NG(不良)的标准。
①
②
Y 尺寸
X 尺寸
起始位置 Y
起始位置 X