00198168-02_Technical_Training_TX-Series_EN.pdf - 第64页
5 Placement Heads 5.1 CPP Head 64 Technical Training SIPLACE TX-Series 10/2016 5.1.3.3 Standard Placement Workflow Standard Placement In this mode (light barrier down) the placement force at the CPP Head is around 2.6N. …
5 Placement Heads
5.1 CPP Head
Technical Training SIPLACE TX-Series 10/2016 63
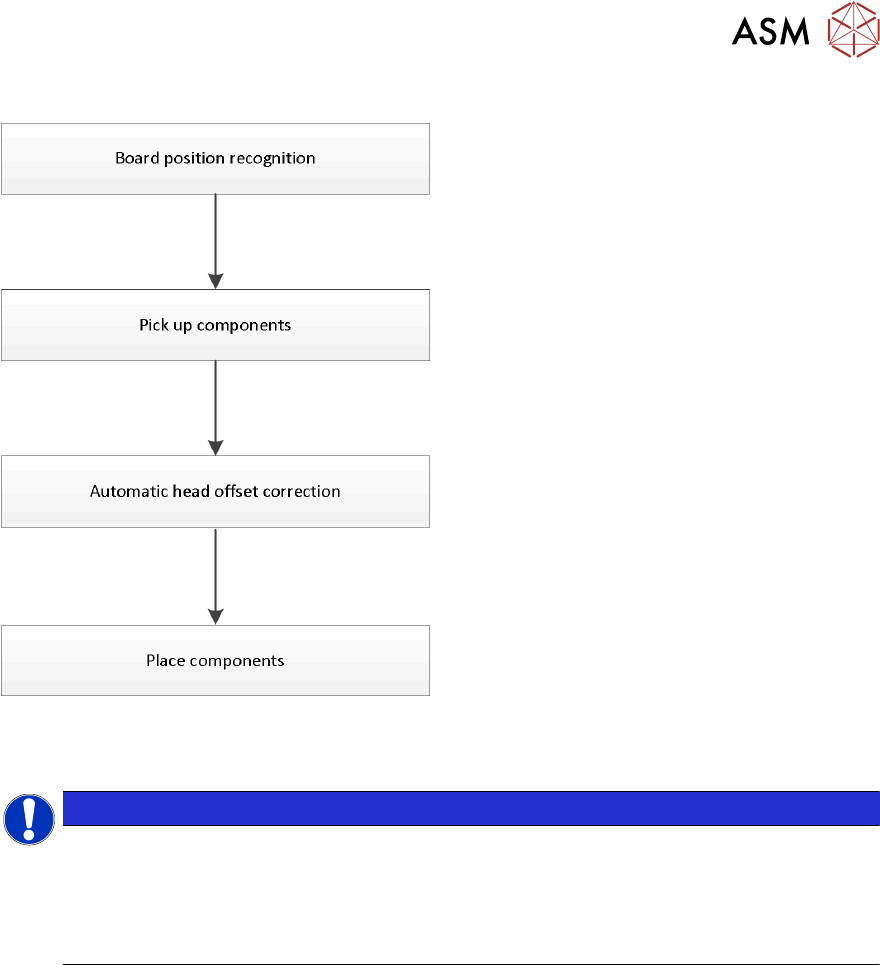
Automatic head offset correction (TX micron only)
●
The PCB camera centers the fiducial after
clamping to determine the exact position of
the board.
●
Max. 12 components will be picked up.
Components are then centered under the
component camera.
●
Automatic head offset correction:
– 25µm @ 3σ:
Every 60 min. 3 fiducial marks on the
Xfiducial bar are checked.
– 20µm @ 3σ:
Every 60 min. all fiducial marks on the
Xfiducial bar are checked.
– 15µm @ 3σ: Every 40 min. :
- The head offset is checked using the
calibration tool on the Xfiducial bar.
- All fiducial marks on the Xfiducial bar
are checked.
- All fiducial marks on the Yfiducial bar
on the vacuum tooling are checked.
– 25/20/15µm @ 3σ:
Every 5 min. the head offsets are
calculated using the components of the
current job.
●
Place components on PCB according to
the program.
NOTICE
Calibration nozzles
For TX micron machines in every nozzle changer at least 1 calibration nozzle (2057) has to
be setup.
In both calibration pockets a calibration tool must be available.
This is necessary to ensure that the automatic head offset correction can take place.
5 Placement Heads
5.1 CPP Head
64 Technical Training SIPLACE TX-Series 10/2016
5.1.3.3 Standard Placement Workflow
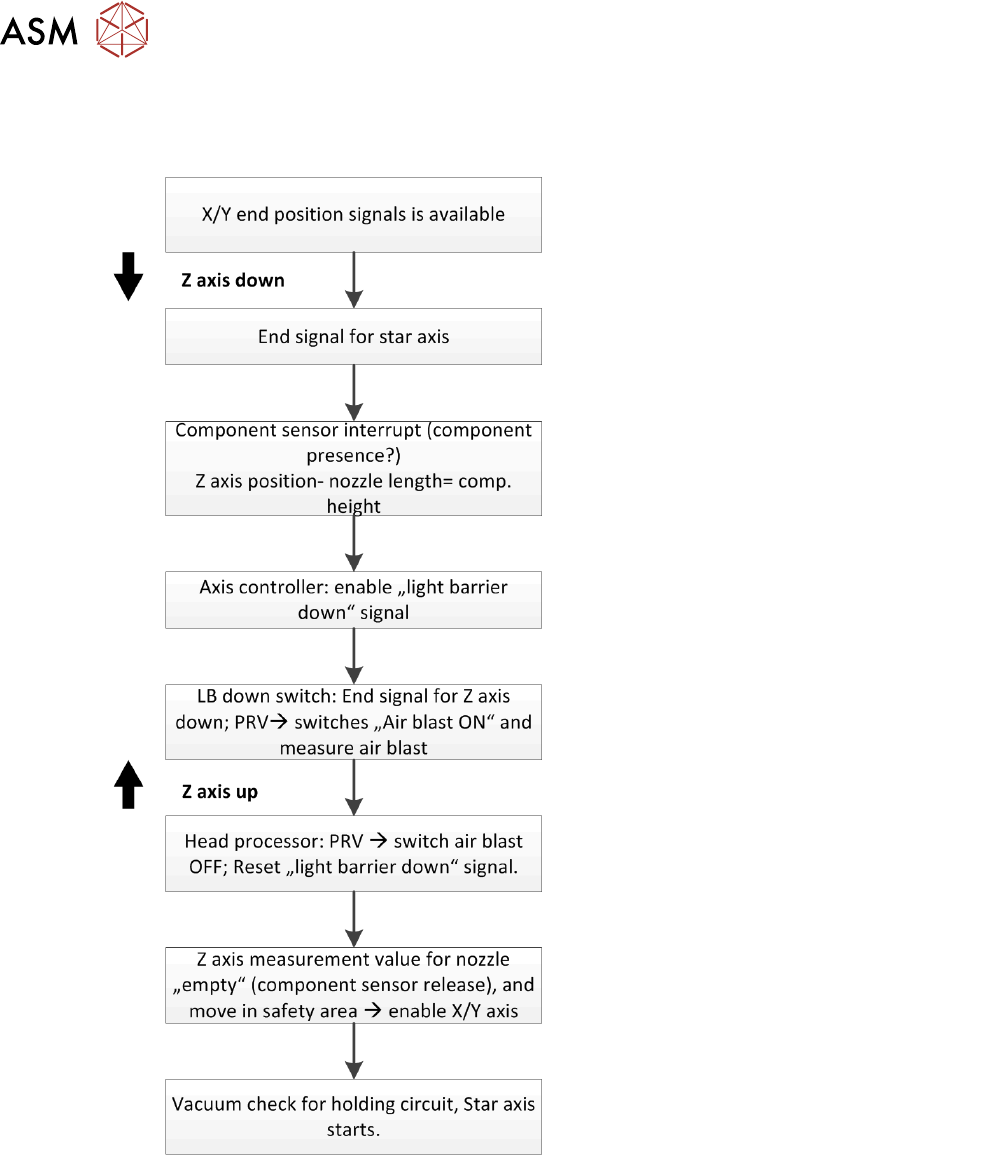
Standard Placement
In this mode (light barrier down) the placement force at the CPP Head is around 2.6N.
During the production, a nozzle scanning run is performed after 350 head cycles (can be set by
SIPLACE service if required) and after the completion of the board currently processed.
The nozzle quality check can be configured in four different levels via the station interface: State
overview, Vakuum values, Hight values, Scan values.
Pick Up Procedure
With early vacuum move to pick up position the vacuum generator switches the vacuum on before
the Z Axis moves down.
"Contactless": The first component is picked up with standard mode to determine the Z Axis down
position, the picked component is rejected. The next components are picked up with the absolute
position of Z Axis down.
5 Placement Heads
5.1 CPP Head
Technical Training SIPLACE TX-Series 10/2016 65
Placement Procedure
"High force": Placement force depends on current of Z Axis to determine end signal of Z Axis down
and vacuum generator switch to air blast.
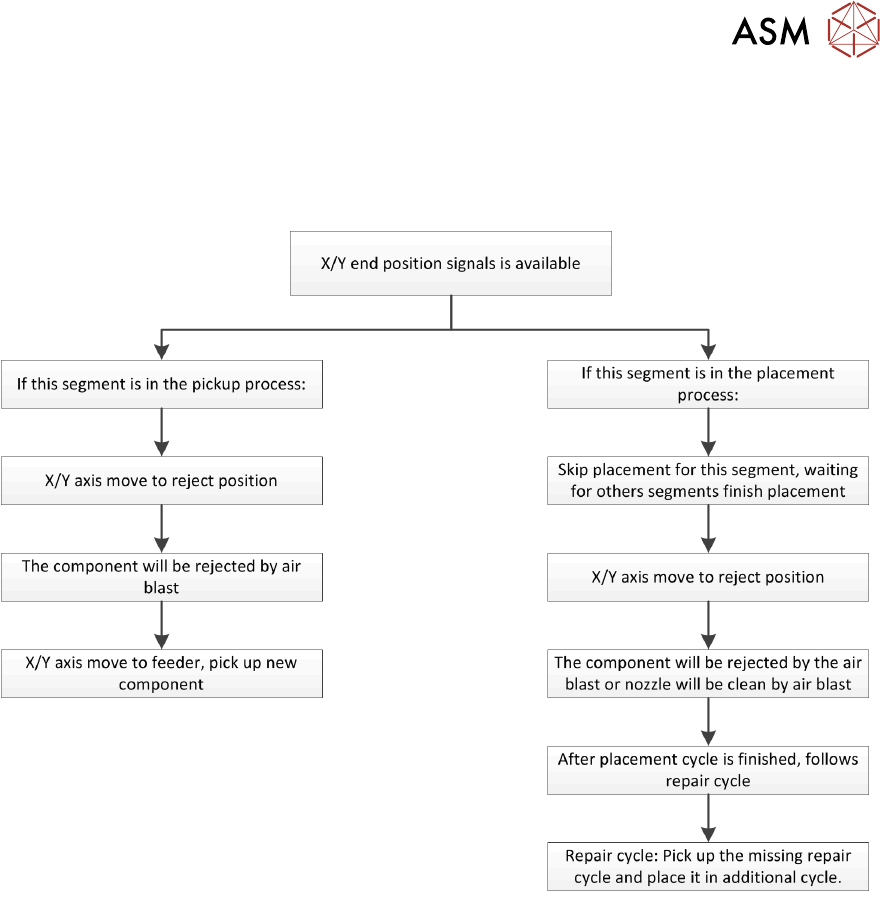
Reject Procedure
"Defective" or "missing" is determined by:
●
Optical centering
●
Component sensor
Temperature Compensation
The temperature sensor is regularly checked and offset value will be calculate and will be used to
increase placement accuracy.