2OM-1321-005_w.pdf - 第61页
1 - 2 Tg 1298 -ID-OP 1.2. 基板認識 0602 - 001 1.2 基板認識 スクリーン 基板 基板認識カメラ テーブル Fig. 2A2 (1) 基板認識カメラ駆動部が X および Y 方向へ移動し、2 個のマーク を認識します。認識後、原点位置に戻ります。 (2) テーブルが印刷位置へ移動した後、 “認識結果より算出した値” だけテーブル X 軸, θ 軸およびスクリーン Y 軸が補正され、移動 します。 (…
1-1
Tg1298-ID-OP
1. 動作概要
0602-001
1. 動作概要
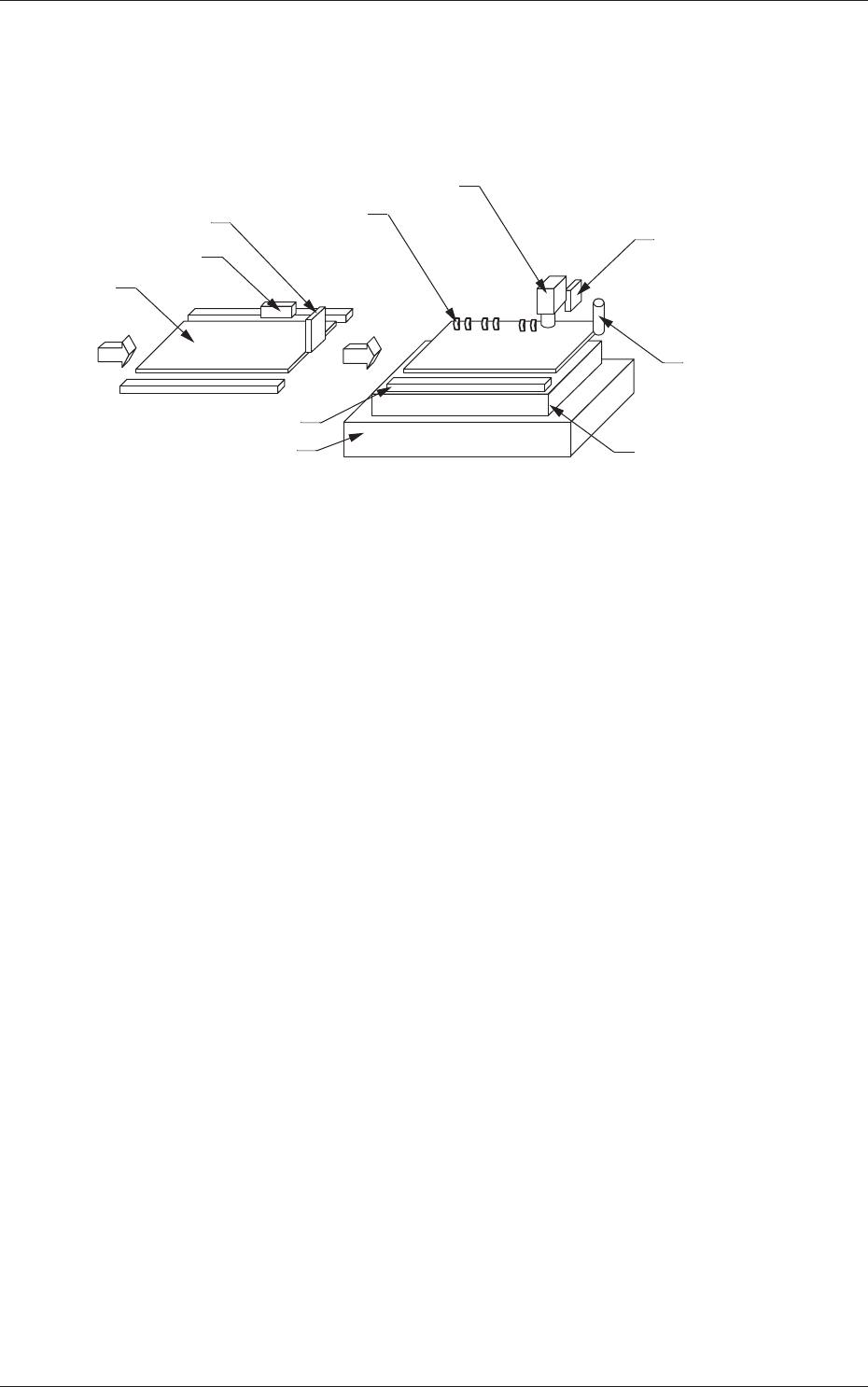
1.1 基板搬入と基板位置決め
基板
供給側基板検出センサ
基板クランプ
テーブル
供給側基板ストッパ
基板反り上押え
基板認識カメラ
基板検出センサ
基板ストッパ
基板バックアップベース
Fig. 2A1
(1) 前工程装置より L コンベアに送られた基板がベルトで搬送され
て L コンベア上の“供給側基板ストッパ”にあたり、“供給側基
板検出センサ”により基板が検出されると、L コンベアが停止し
ます。
(2) 基板位置決め部を乗せたテーブルが基板供給位置まで移動し、
基板認識カメラも基板認識サイズに応じた位置まで移動すると、
“基板ストッパ”が下降します。
(3) “基板ストッパ”の下降後、L コンベアが駆動します。
基板位置決め部のコンベアは、
L コンベアと歯車が噛み合うこと
により駆動します。
このとき、
“基板反り上押え”が下降します。
(4) 基板が基板位置決め部へ移載され、基板認識カメラ駆動部につ
いた“基板ストッパ”にあたり“基板検出センサ”によって基
板が検出されると L コンベアが停止します。
(5) 基板位置決め部の基板バックアップベースが上昇し、
“基板クラ
ンプ”により基板を固定します。
(6) 基板位置決め部の動作が終了すると、“基板反り上押え”と“基
板ストッパ”が上昇します。
1-2
Tg1298-ID-OP
1.2. 基板認識
0602-001
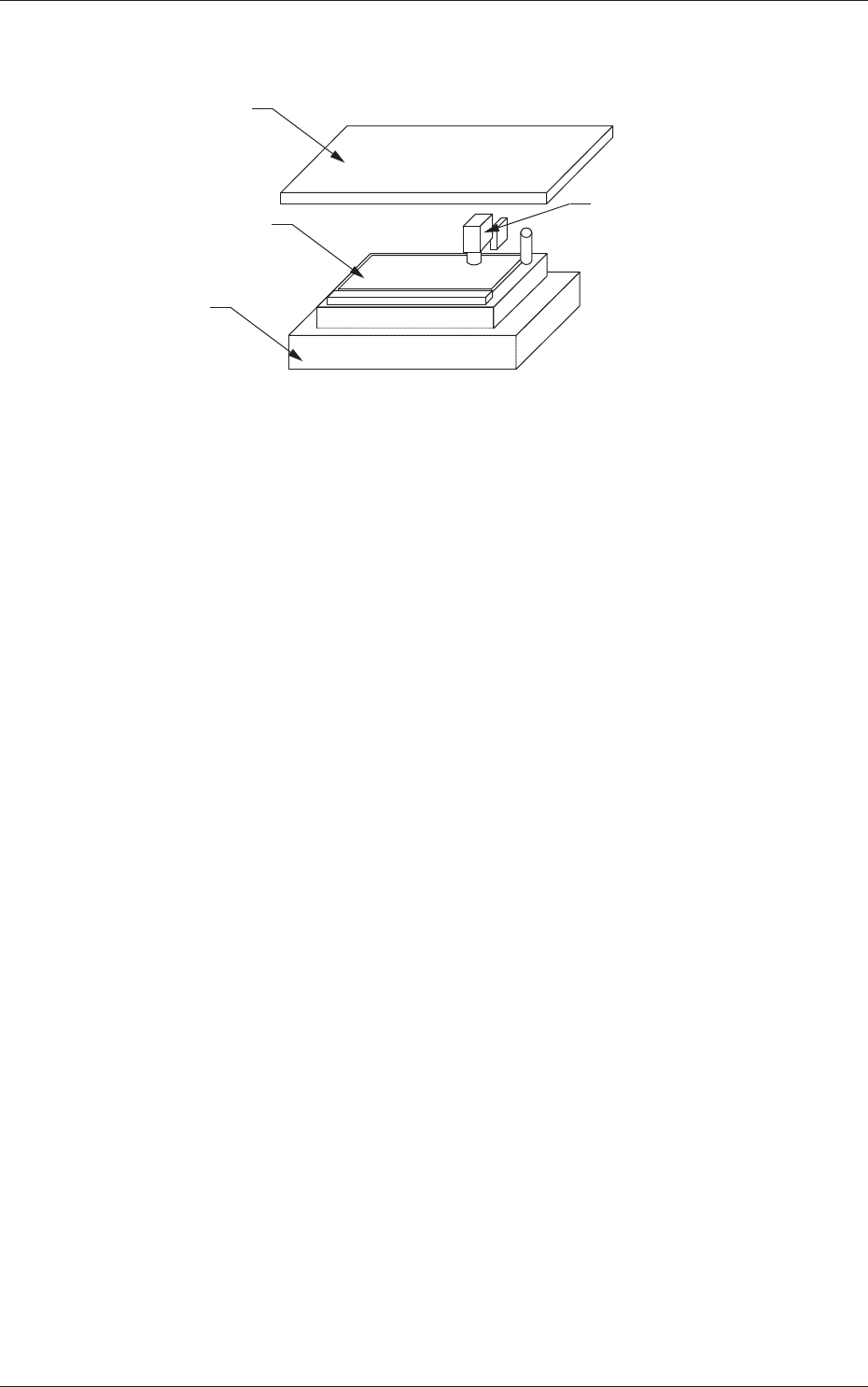
1.2 基板認識
スクリーン
基板
基板認識カメラ
テーブル
Fig. 2A2
(1) 基板認識カメラ駆動部が X および Y 方向へ移動し、2 個のマーク
を認識します。認識後、原点位置に戻ります。
(2) テーブルが印刷位置へ移動した後、“認識結果より算出した値”
だけテーブル X
軸,
θ
軸およびスクリーン
Y 軸が補正され、移動
します。
(3) テーブル Z
軸が“パターンプログラムで設定したギャップ量”
になるまでテーブルが上昇します。
1-3
Tg1298-ID-OP
1.3. 印刷
0602-001
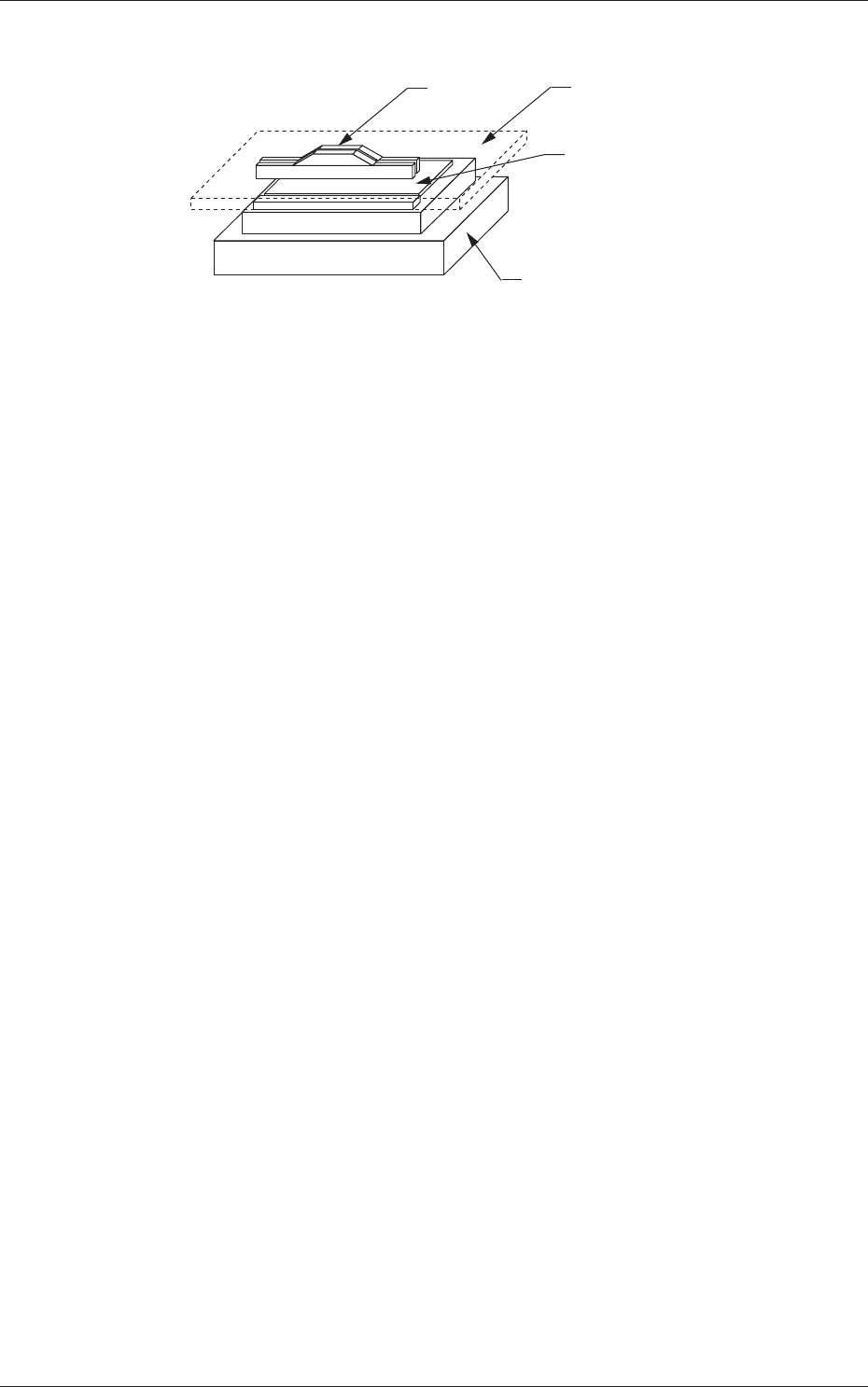
1.3 印刷
スクリーン
スキージ
テーブル
基板
Fig. 2A3
(1) 片側印刷の場合
スキージが印刷ストロークの奥側にある場合は、“スキージ B
(奥)”が下降し、手前へ移動して印刷します。
スキージが印刷ストロークの手前側にある場合は、“スキージ A
(手前)”が下降し、奥側へ移動して印刷を行います。
往復印刷の場合
“スキージ A(手前)”が下降し、奥側へ移動して印刷を行った後、
奥側でスキージ
A が上昇します。そして、“スキージ B(奥)”が
下降し、手前側へ移動して印刷を行います。
(2) スキージが停止した後、テーブルが下降した後にスキージが上
昇します。
または、スキージが先に上昇した後にテーブルが下降します。
どちらが先に動作するかは“パターンプログラム”により設定
できます。