00191755-01.pdf - 第197页
Instrucc iones de uso SIPLACE HS-50 6 Funciones ópticas Versión de s oftware SR.501.xx E dición 12/99 ES 6.3 Sistema óptico de componentes 197 t I I t 6 Fig. 6.3 - 1 Com ponente regular Leyenda re ferente a la Fi g. 6.3 …

6 Funciones ópticas Instrucciones de uso SIPLACE HS-50
6.3 Sistema óptico de componentes Versión de software SR.501.xx Edición 12/99 ES
196
t IIt
Gama de componentes reconocibles: TSOP, LCC, PLCC, QFP, series SO hasta SO28
en principio todos los componentes con patillas J y
Gullwing,
µ
BGAs
Distancia mínima entre patillas: 0,3 mm para la cámara
0,5 mm para la máquina
Diámetro mínimo de "bolita" para
µ BGAs
:250µm 6
6.3.1.3 Descripción de funcionamiento
Un segmento del cabezal de colocar 12x toma un componente en la estación estrella 1. La estre-
lla avanza y se toman más componentes. En la estación estrella 7 se encuentra la unidad del sis-
tema óptico de componentes. Al llegar allí tres líneas LED desplazadas iluminan el componente
de forma uniforme con luz roja. El sistema óptico representa de forma nítida componentes hasta
una altura de 5 mm en el chip CCD de la cámara. 6
La imagen digital de componente generada por la cámara es transmitida a la unidad de evalua-
ción óptica. Con la ayuda de métodos de tratamiento digital de imagen (procesos HALE) la unidad
de evaluación compara la imagen del componente con un modelo teórico anteriormente gene-
rado en el editor GF (empaquetado). Los parámetros obtenidos suministran información sobre la
desviación de posición, ángulo de giro, estado de patillas e identificación del componente. El pro-
ceso HALE es bastante estable a perturbaciones como reflexiones, diferente comportamiento de
reflexión de las patillas, influencias de luz difusa, etc. Es más preciso y rápido que el proceso Ma-
tching. Después de una correcta medición, el segmento gira el componente en la estación estrella
9 a la correcta dirección de colocación. En la estación estrella 1 se dota el componente en posi-
ción correcta sobre la tarjeta de circuitos. 6
6.3.2 Criterios para el registro de componentes
Forma de los componentes 6
Con el centrado óptico de los componentes pueden centrarse componentes regulares e irregula-
res. Como número máximo de patillas en dirección horizontal o vertical se admite 99. 6
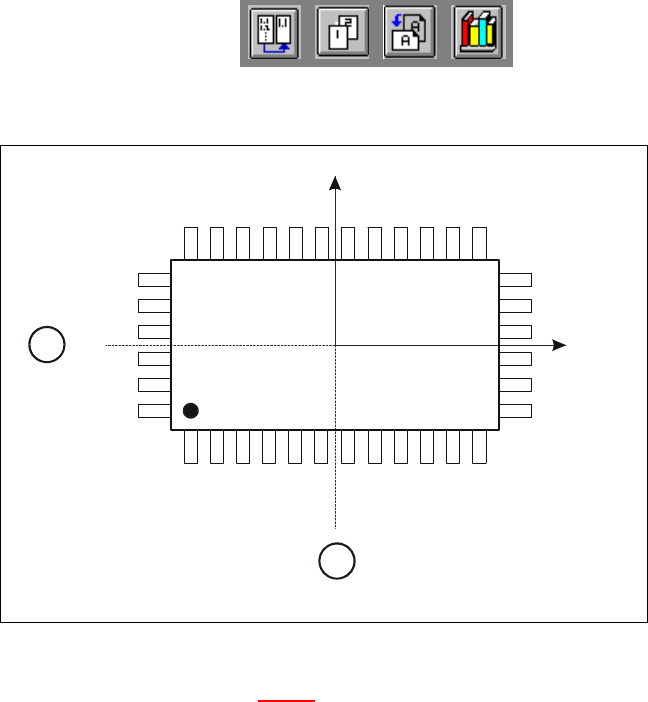
Criterios para componentes regulares 6
Definición 6
Un componente se denomina regular cuando se cumplen las siguientes condiciones: 6
– empaquetado rectangular (caso especial: empaquetado cuadrado)
– solamente un modelo de patilla (lead-type)
– solamente un grupo de patillas por cara
– los grupos de patillas opuestos son simétricos respecto a los ejes principales
(eje X, eje Y).
Instrucciones de uso SIPLACE HS-50 6 Funciones ópticas
Versión de software SR.501.xx Edición 12/99 ES 6.3 Sistema óptico de componentes
197
t IIt
6
Fig. 6.3 - 1 Componente regular
Leyenda referente a la Fig. 6.3 - 1
(1) Eje de simetría
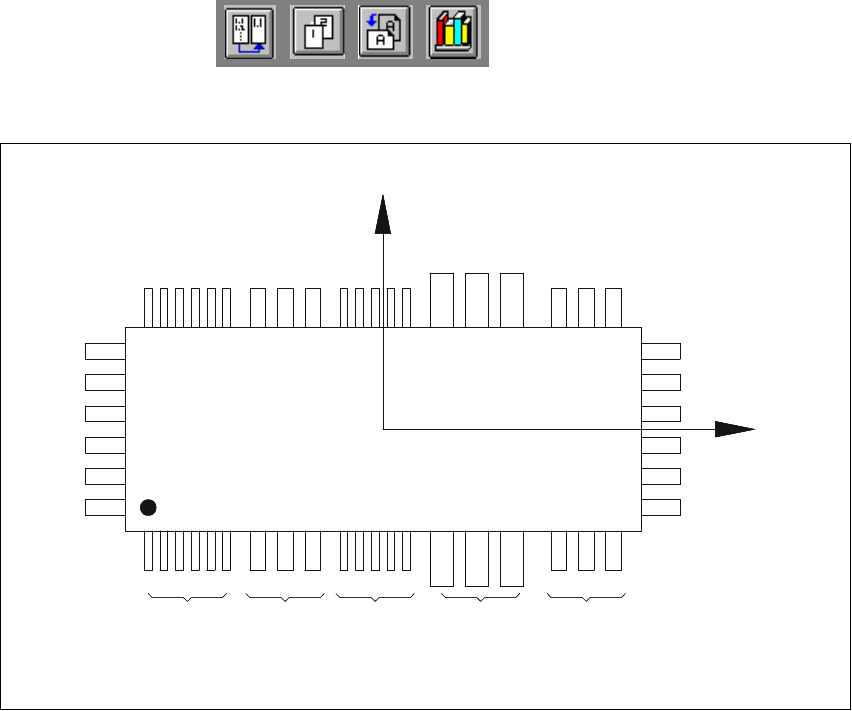
Criterios para componentes irregulares 6
Definición 6
Un componente se denomina irregular cuando no se cumplen las condiciones para los compo-
nentes regulares. 6
Condiciones adicionales para el centrado con el sistema óptico de componentes: 6
– en una fila se permiten hasta 3 diferentes modelos de patillas.
– en una fila se admiten hasta 15 grupos.
Y
X
Pin 1
1
1
6 Funciones ópticas Instrucciones de uso SIPLACE HS-50
6.3 Sistema óptico de componentes Versión de software SR.501.xx Edición 12/99 ES
198
t IIt
6
Fig. 6.3 - 2 Ejemplo de componentes irregulares
Desviación de distribución 6
Para cada componente puede introducirse de forma independiente la desviación de distribución
en el editor "GF" (empaquetado) (es decir la distancia de distribución de centro de patilla a centro
de patilla). Si se excede este valor, el componente no se centra y con ello no se dota. 6
Valor límite de la medición de calidad 6
Los componentes no deben exceder los valores límite de la medición de calidad, ya que entonces
no se dotan.
Valores límite son: 6
– diferencia del número de patillas entre original y modelo.
– desviación de distribución mayor que el valor en el fichero - GF.
– error de ortogonalidad mayor al definido en el fichero - GF.
– mayor desviación de las medidas exteriores.
– desviación del punto medio mayor a la tolerancia de posición admisible al recoger.
Modell 1
Gruppe 1
Modell 2
Gruppe 1
Modell 1
Gruppe 2
Modell 3
Gruppe 1
Modell 2
Gruppe 2
X
Pin 1
Y
X
Pin 1
Modelo 1 Modelo 2 Modelo 1 Modelo 3 Modelo 2
Grupo 1 Grupo 1 Grupo 2 Grupo 1 Grupo 2