2020年协作机器人行业发展蓝皮书.pdf - 第22页
2020 年协作机器人产业发 展蓝皮书 21 第三章 协作机器人技术发展分析 第一节 协作机器人技术环境分析 截至 2019 年 末,中国协作 机器人 相关专利共申 请 1277 件 ,其中, 发明专利 数为 793 件, 占比 62.10 % ;实用新型专利数为 2 29 件 ,占比 17.93 % ; 发明授权专利数为 169 件, 占比 13.23 % ;外观专利 数为 86 件 ,占比 6.73 % 。 201 8 年, 协作机…

2020 年协作机器人产业发展蓝皮书
20
立身之本
叁
立
叁
2020 年协作机器人产业发展蓝皮书
21
第三章 协作机器人技术发展分析
第一节 协作机器人技术环境分析
截至 2019 年末,中国协作机器人相关专利共申请 1277 件,其中,发明专利数为 793
件,占比 62.10%;实用新型专利数为 229 件,占比 17.93%;发明授权专利数为 169 件,
占比 13.23%;外观专利数为 86 件,占比 6.73%。
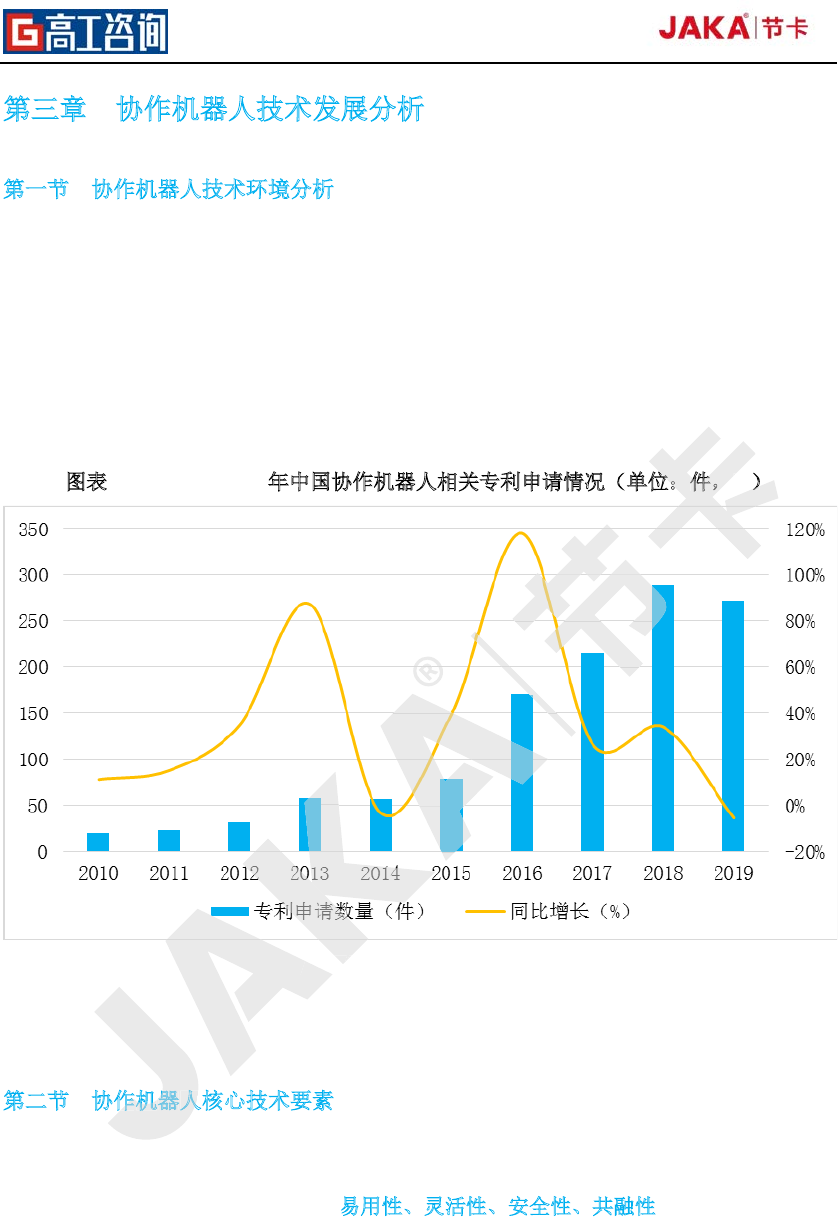
2018 年,协作机器人相关专利申请数为 288 件,达到峰值。2019 年协作机器人相关专
利申请数量为 272 件,同比下降 5.56%。
图
表 13 2010-2019 年中国协作机器人相关专利申请情况(单位:件,%)
数据来源:
SooPat
,高工机器人产业研究所(
GGII
)整理
第二节 协作机器人核心技术要素
协作机器人是一种被设计成能与人类在共同工作空间中进行近距离互动的机器人,其区
别于传统工业机器人的特点主要有:易
用性、灵活性、安全性、共融性。
安全问题是人机协作系统的基础,协同工作必须以保证操作人员的安全为前提;易用性
和灵活性是人机协作系统的重点,能够快速适应柔性的、复杂的生产方式是协作机器人的优
势;共融性则是协作机器人全面深入市场、多方位超越工人的核心。
位
:
件
,
%
)
数据
来源:
数据
作
机
器
人
2020 年协作机器人产业发展蓝皮书
22
(1)易用性方面
易用性是机器人控制器设计的重中之重,其中涉及具体技术包含各类图形化编程、工艺
包、示教方式、指令丰富程度、二次开发平台、系统扩展性(硬接口,软协议),离线编程
软件等。
虽然,协作机器人的拖动示教功能特性免去了传统工业机器人复杂的编程和配置,使其
操作简单、易上手;但是,目前市场的一些协作机器人产品,它们提供的图形界面只能完成
一些简单的拣选/取放任务,仍存在易用性不强的问题。
为提升协作机器人的易用性,行业内企业对机器人编程语言进行开发优化,使机器人能
适应复杂工作环境。如 JAKA 节卡机器人已经形成无线示教、图形化编程、拖拽示教技术等
核心技术,并将协作机器人定位为“简单易用、机器人使用零门槛”;日本 Mujin 提供一种简
单快速的 3D 环境重建方法及针对复杂环境进行自动轨迹规划的技术,可大幅降低机器人部
署时间和工作量。
(JAKA 节卡机器人 APP 界面)
随着协作机器人应用领域的不断扩展,提升协作机器人简单易用性,提供更简单直观、
功能更强大的编程方法仍将是协作机器人企业长期努力的方向。
简单易用、机器人使用零门槛
”
;
环境重建方法及针对复杂环境进行自动轨迹规划的技术,可大幅降低机器人部
环境重建方法及针对复杂环境进行自动轨迹规划的技术,可大幅降低机器人部
为提升协作机器人的易用性,行业内企业对机器人编程语言进行开发优化,使机器人能
节卡机器人已经形成无线示教、图形化编程、拖拽示教技术等
日本
提供一种简