2020年协作机器人行业发展蓝皮书.pdf - 第38页
2020 年协作机器人产业发 展蓝皮书 37 图表 19 安全功能图示 对于类别 3 , 应满足类别 B 的要求和 “经验证的安全 原则” 的要求 , 另外还应满 足以下 要求: 类别 3 的 S R P/C S 的设计应使得 任何这些部件 中的单一故障都 不会导致安全 功能 丧失。 只要合理可行, 单一故障 应在下一次要求 安全功能时或之 前被检测出。 整个 S RP/CS 的 诊断覆盖率( D C avg )应至少为 低…
2020 年协作机器人产业发展蓝皮书
36
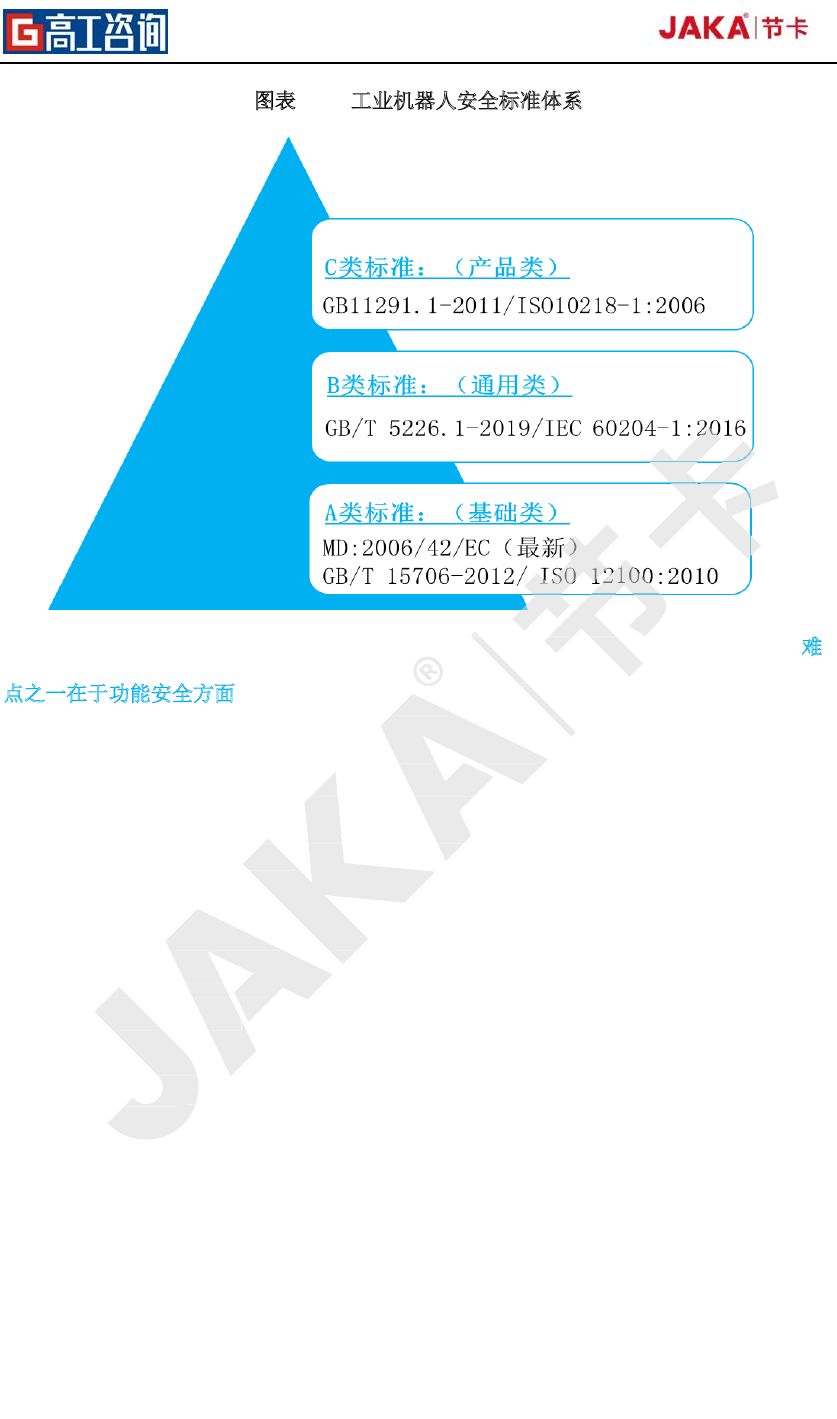
图表 18 工业机器人安全标准体系
通过国家机器人检测与评定中心(总部)多年的认证实践,目前协作机器人的认证难
点之一在于功能安全方面,市面上的传统工业机器人往往采用外购安全模块的方式,可实
现 1-2 种机器人的功能安全,如急停回路等。而协作机器人突破了传统工业机器人的限
制,机器人与人在协作区域里共同作业,对协作机器人的安全设计提出了更高的要求。
按照 GB/T 36008-2018,协作机器人的协同操作可以包含以下其中的一种或多种方法:
安全适用的受监控停止;
手动引导;
速度与分离监控;
功率与力的控制。
GB 11291.1 5.10 规定了协同操作的要求,与安全相关的控制系统性能(软件/硬件)应
符合 GB/T 16855.1 安全类别 3 的要求,除非风险评估的结果确定一种替代的性能准则是适
当的。
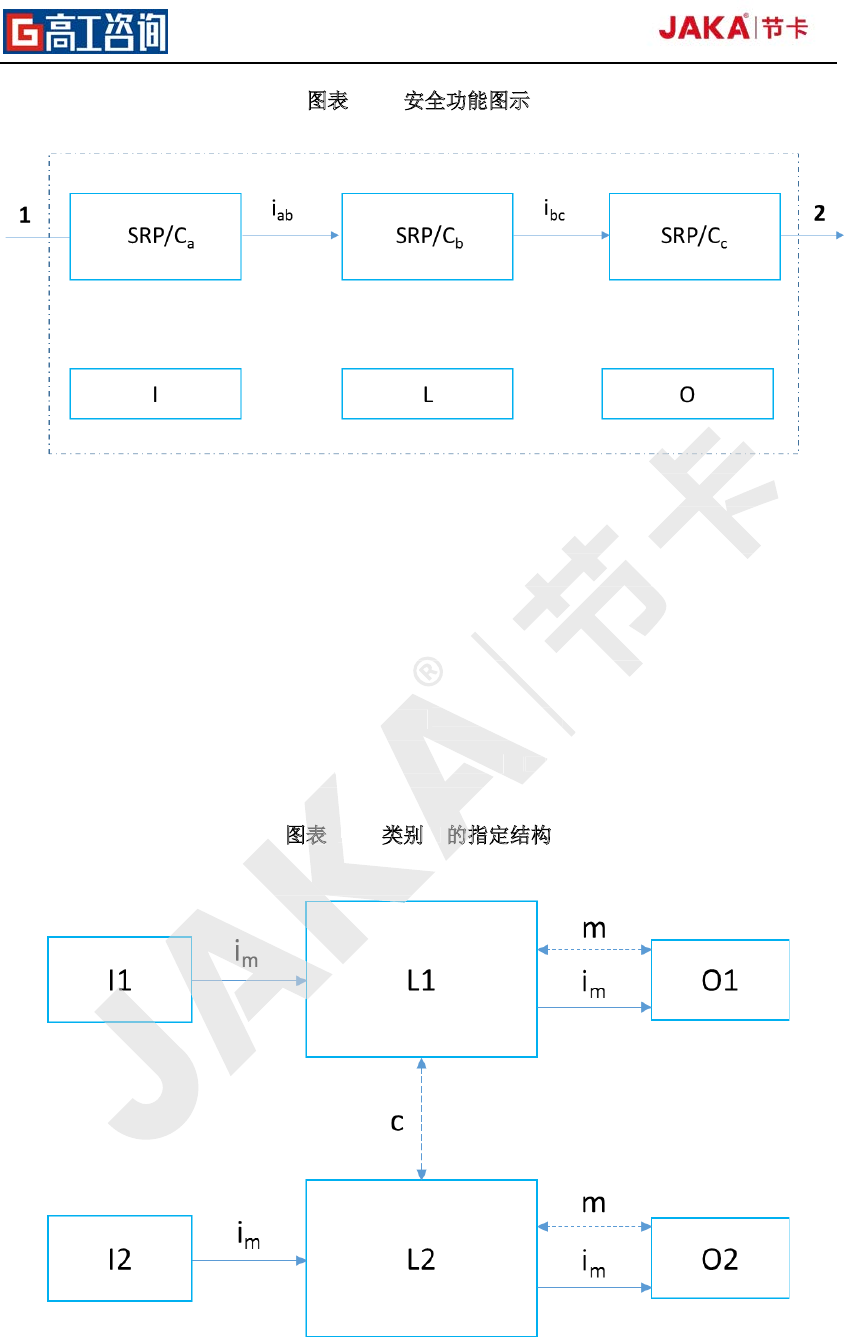
控制系统安全相关部件(SRP/CS)由以下几方面组成,如下图所示:
——输入(SRP/CS
a
);
——逻辑/处理(SRP/CS
b
);
——输出/动力控制组件(SRP/CS
c
);
——相互连接方式(iab,ibc)(例如:电学的、光学的)
通过国家机器人检测与评定中心(总部)多年的认证实践,目前协作机器人的认证
通过国家机器人检测与评定中心(总部)多年的认证实践,目前协作机器人的认证
市面上的传统工业机器人往往采用外购安全模块的方式,可实
种机器人的功能安全,如急停回路等。而协作机器人突破了传统工业机器人的限
制,机器人与人在协作区域里共同作业,对协作机器人的安全设计提出了更高的要求。
,协作机器人的协同操作可以包含以下其中
,协作机器人的协同操作可以包含以下其中
安全适用的受监控停止;
手动引导;
速度与分离监控;
功率与力的控制。
规定了协同操作的要求,与安全相关的控制系统性能(软件
市面上的传统工业机器人往往采用外购安全模块的方式,可实
种机器人的功能安全,如急停回路等。而协作机器人突破了传统工业机器人的限
制,机器人与人在协作区域里共同作业,对协作机器人的安全设计提出了更高的要求。
,协作机器人的协同操作可以包含以下其中
功率与力的控制。
B 11291.1 5.10
B/T 16855.1
安全类别
市面上的传统工业机器人往往采用外购安全模块的方式,可实
2020 年协作机器人产业发展蓝皮书
37
图表 19 安全功能图示
对于类别 3,应满足类别 B 的要求和“经验证的安全原则”的要求,另外还应满足以下
要求:
类别 3 的 SRP/CS 的设计应使得任何这些部件中的单一故障都不会导致安全功能
丧失。
只要合理可行,单一故障应在下一次要求安全功能时或之前被检测出。
整个 SRP/CS 的诊断覆盖率(DCavg)应至少为低。
每个冗余通道的 MTTFD 应由低到高,取决于 PLr。应采取防止 CCF 的措施。
图
表 20 类别 3 的指定结构
的设计应使得任何这些部件中的单一故障都不会导致安全功能
的设计应使得任何这些部件中的单一故障都不会导致安全功能
只要合理可行,单一故障应在下一次要求安全功能时或之前被检测出。
的要求和“经验证的安全原则”的要求,另外还应满足以下
只要合理可行,单一故障应在下一次要求安全功能时或之前被检测出。
)应至少为低。
应由低到高,取决于
表
20
Cavg
)应至少为低。
应由低到高,取决于
P
Lr
。应采取防止
3
的
指
只要合理可行,单一故障应在下一次要求安全功能时或之前被检测出。
只要合理可行,单一故障应在下一次要求安全功能时或之前被检测出。
2020 年协作机器人产业发展蓝皮书
38
i
m
—连接方式;
c—交叉监控;
I1、I2—输入装置,例如:传感器;
L1、L2—逻辑模块;
m—监控;
O1、O2—输出装置,例如:主接触器。
虚线代表合理可行的故障检测。
类别 3 采用双通道冗余设计和安全控制系统双系统相互监控的要求,即使单一系统发
生故障,也能通过冗余系统检测出故障并确保机器人进入安全状态。协作机器人要满足认证
要求,采用外购安全模块的方式既不经济,技术可行性也非常低。只有产品研发团队具备核
心技术及自主知识产权,才可能从底层到上层自主开发,在研发产品设计阶段就引入功能安
全的概念,真正做到开发出来的安全控制系统符合功能安全要求,达到协作机器人本质安全
的要求。
协作机器人的认证难点之二在于力/压力的测试方法。除了通过增强协作机器人安全功
能相关的性能等级来满足协作机器人认证,另一种方式是通过控制协作机器人的力/压力的
大小来满足认证要求。GB/T 36008 标准明确要求了力/压力的限值,但对测试方法(测试点、
被测样品模式等)没有明确要求,难以保证测试结果的科学性、一致性。
国评中心(总部)邀请节卡等行业知名企业、研究所,进行了测试方法探讨,明确了协
作机器人的测试姿态、碰撞点、测 试速度、负载等要求,制定了认证技术规范,相关标准也
在制定中。
二
、协作机器人认证趋势分析
从协作机器人认证项目进行分析,未来认证包括:
(一)协作机器人安全认证,协作机器人属于工业机器人范畴,而其对安全性要求较传
统工业机器人更高,安全性认证是必不可少的,例如传统机械电气安全认证、功能安全认证,
以及机器人联网后的信息安全认证;
(二)协作机器人交互性认证,协作机器人与工业机器人的最大区别在于与人的直接交
互,其典型特征为拖动示教、力控、柔顺性等。随着协作机器人在各行各业的广泛应用,其
交互性在不同行业会存在不同的要求,协作机器人交互性认证是未来的认证趋势之一;
要求,采用外购安全模块的方式既不经济,技术可行性也非常低。只有产品研发团队具备核
心技术及自主知识产权,才可能从底层到上层自主开发,在研发产品设计阶段就引入功能安
全的概念,真正做到开发出来的安全控制系统符合功能安全要求,达到协作机器人本质安全
心技术及自主知识产权,才可能从底层到上层自主开发,在研发产品设计阶段就引入功能安
全的概念,真正做到开发出来的安全控制系统符合功能安全要求,达到协作机器人本质安全
采用双通道冗余设计和安全控制系统双系统相互监控的要求,即使单一系统发
生故障,也能通过冗余系统检测出故障并确保机器人进入安全状态。协作机器人要满足认证
要求,采用外购安全模块的方式既不经济,技术可行性也非常低。只有产品研发团队具备核
心技术及自主知识产权,才可能从底层到上层自主开发,在研发产品设计阶段就引入功能安
除了通过增强协作机器人安全功
/T 36008
标准
被测样品模式等)没有明确要求,难以
(总部)邀请节卡等行业知名企业、研究所,进行了测试方法探讨,
被测样品模式等)没有明确要求,难以
(总部)邀请节卡等行业知名企业、研究所,进行了测试方法探讨,
、测试
速度、
作机器人的测试姿态、
碰撞点
、测试
势
分
压
力
的
测
试
能相关的性能等级来满足协作机器人认证,另一种方式是通过控制协作机器人的力
明确要求了
力
保证测试结果的科学性、一致性
人
认
证
趋
从协作机器人认证项目进行分析,未来认证包括: