2020年协作机器人行业发展蓝皮书.pdf - 第65页
2020 年协作机器人产业发 展蓝皮书 64 案例 3 某知名汽车企业 企业需求 涂胶解决方案 面临挑战 1 、在涂胶工艺 中,机器人 较大的姿态 变化率会导致 胶形不稳定; 2 、在涂胶工艺 中,胶管的 甩动产生惯 性力会导致涂 胶位置发生偏差 。 解决方案 针对柔性装配过程中存在的常见难题,提出 J AK A Z u 3 加运动规划的方案。具体 方案如下: 1 、 在 涂胶拐角处, 通过超前处理 或滞后处 理, 减 小胶枪在圆弧 段…
2020 年协作机器人产业发展蓝皮书
63
项目成效
1、双工位方式配置机器人,减少物料转运环节,优化搬运时间和工序配置;
2、代替人工,提高自动化水平。
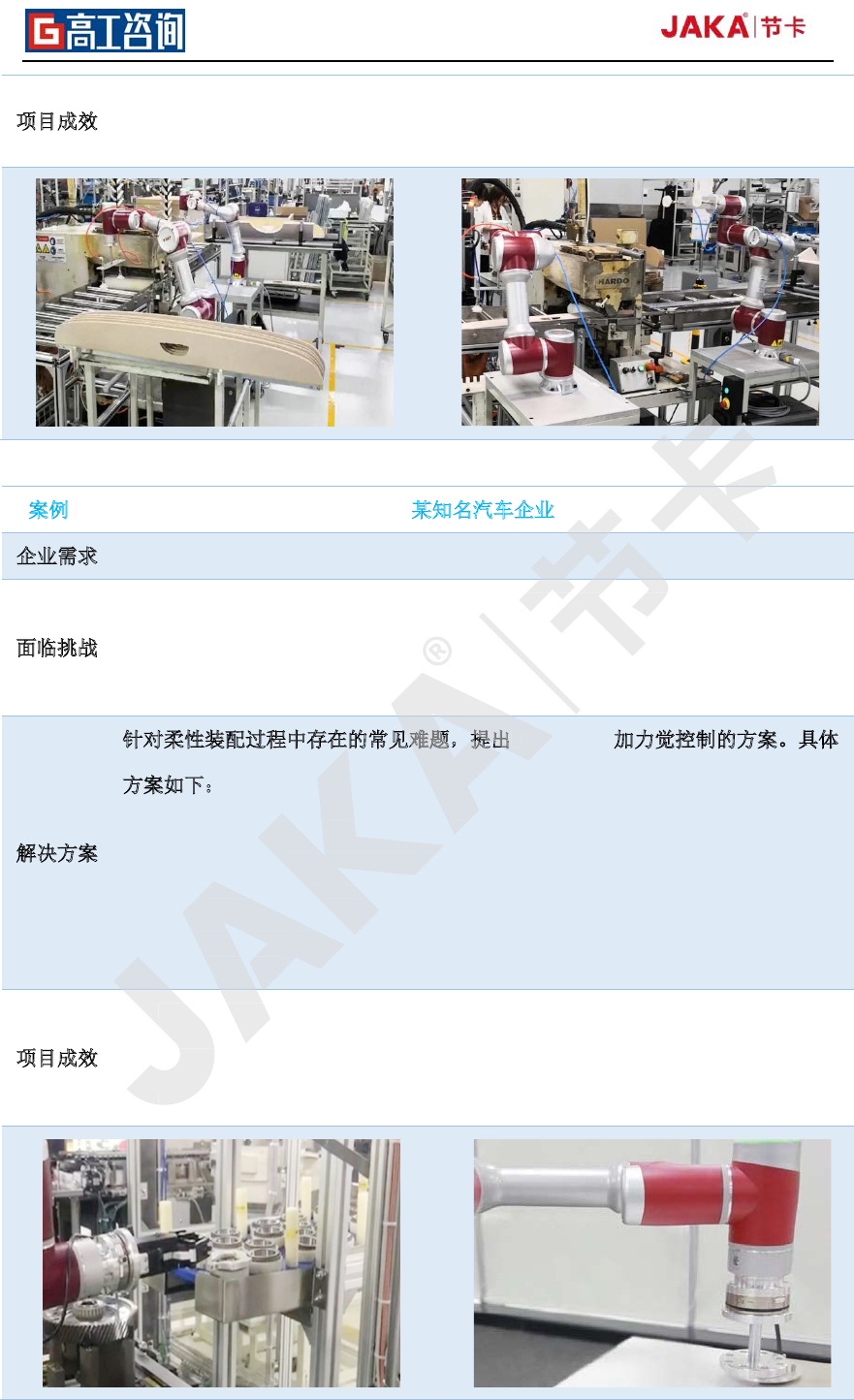
案例 2 某知名汽车企业
企业需求 汽车发动机柔性装配解决方案
面临挑战
1、 发动机齿轮箱深度较深,机器人在双销轴装配时,由于位姿、速度难以实现
同步,造成装配困难、甚至无法装配;
2、装配间隙小,精度要求高。
解决方案
针对柔性装配过程中存在的常见难题,提出JAKA Zu 7加力觉控制的方案。具体
方案如下:
1、
在双销轴装中引入力控自适应算法,实时检测双销轴的受力情况,在单边间隙
小于 0.02mm 的情况下,稳定可靠的完成装配;
2、 在装配过程中根据双销轴两边受力情况,不断调整 JAKA Zu 7 的位姿、速度,
实现装配要求。
项目成效
1、
在运行过程中,机器人会根据受力情况,实时改变其自身的位姿、速度,有效
防止工件的损耗、提高劳动生产率;
2、 把人从装配线中解放出来,降低人工成本,提高生产线的自动化程度。
汽车发动机柔性装配解决方案
发动机齿轮箱深度较深,机器人在双销轴装配时,由于位姿、速度难以实现
汽车发动机柔性装配解决方案
发动机齿轮箱深度较深,机器人在双销轴装配时,由于位姿、速度难以实现
在双销轴装中引入力控自适应算法,实时检测双销轴的受力情况,在单边间隙
的情况下,稳定可靠的完成装配;
在双销轴装中引入力控自适应算法,实时检测双销轴的受力情况,在单边间隙
的情况下,稳定可靠的完成装配;
在装配过程中根据双销轴两边受力情况,不断调整
0.02mm
在装配过程中根据双销轴两边受力情况,不断调整
实现装配要求。
在运行过程中,机器人会根据受力情况,实时改变其自身的位姿、速度,有效
提
出
见
难
题
提
J
AKA Z
在双销轴装中引入力控自适应算法,实时检测双销轴的受力情况,在单边间隙
在运行过程中,机器人会根据受力情况,实时改变其自身的位姿、速度,有效
防止工件的损耗、提高劳动生产率;
把人从装配线中解放出来,降低人工成本,提高生产线的自动化程度。
同步,造成装配困难、甚至无法装配;
同步,造成装配困难、甚至无法装配;

2020 年协作机器人产业发展蓝皮书
64
案例 3 某知名汽车企业
企业需求 涂胶解决方案
面临挑战
1、在涂胶工艺中,机器人较大的姿态变化率会导致胶形不稳定;
2、在涂胶工艺中,胶管的甩动产生惯性力会导致涂胶位置发生偏差。
解决方案
针对柔性装配过程中存在的常见难题,提出JAKA Zu 3加运动规划的方案。具体
方案如下:
1、 在涂胶拐角处,通过超前处理或滞后处理,减小胶枪在圆弧段的旋转角度,使
机器人运动轨迹平缓、稳定;
2、 在圆弧段,通过超前处理或滞后处理,减小机器人摆动角度,减缓机器人的运
动速度,提高系统的稳定性;
3、
在涂胶首尾连接处,通过超前处理,采用渐变的方式,在关闭胶枪之前,完成
机器人姿态的变化,使机器人的运动稳定,达到更好的成形效果;
4、 尽量保证动作的简化、单一,实现机器人平稳动作。
项目成效
1、 在运行过程中,通过对涂胶拐角、圆弧段、首尾连接处实施不同的运动规划
策略,保证了涂胶质量的一致性;
2、代替人工,提高自动化水平。
在涂胶首尾连接处,通过超前处理,采用渐变的方式,在关闭胶枪之前,完成
机器人姿态的变化,使机器人的运动稳定,达到更好的成形效果;
在涂胶首尾连接处,通过超前处理,采用渐变的方式,在关闭胶枪之前,完成
机器人姿态的变化,使机器人的运动稳定,达到更好的成形效果;
在圆弧段,通过超前处理或滞后处理,减小机器人摆动角度,减缓机器人的运
尽量保证动作的简化、单一,实现机器人平稳动作。
在运行过程中,通过对涂胶拐角、圆弧段、首尾连接处实施不同的运动规划
策略,保证了涂胶质量的一致性;
提高自动化水平
在运行过程中,通过对涂胶拐角、圆弧段、首尾连接处实施不同的运动规划
策略,保证了涂胶质量的一致性;
尽量保证动作的简化、单一,实现机器人平稳动作。
尽量保证动作的简化、单一,实现机器人平稳动作。

2020 年协作机器人产业发展蓝皮书
65
案例 4 某知名汽车配件企业
企业需求 机器视觉实现车灯光导条检测
面临挑战
1、
之前采用人工检测方式光导条中存在的瑕疵。此方法费时费力,难以保证检测
质量的一致性;
2、
光导条结构细长,并且夹具刚性较大。夹具在固定光导条时,容易擦伤、挤压、
甚至折断光导条;
3、 采用自动化设备检测光导条,需保证设备简单易用、稳定可靠。
解决方案
针对光导条检测过程中存在的常见难题,提出JAKA Zu 3加机器视觉的方案。具
体方案如下:
1、 设计视觉检测设备,设备采用“JAKA Zu 3+摄像头+PLC+专用夹具”架构。
其中夹具负责固定光导条、机器人负责运动、摄像头负责扫描、PLC 负责显示
检测结果。此设备结构简单、稳定可靠、使用方便;
2、 设备采用视觉算法检测光导条的瑕疵,保证检测质量的一致性;
3、
设计弹性夹具。同时,在夹具末端安装软性塑料,避免夹具在装夹光导条时,
擦伤、挤压、折断光导条。
项目成效
1、 自动化设备检测光导条,简单易用、稳定可靠,具有广泛的市场前景;
2、 代替人工,提高检测稳定性。
第二节 3C 电子行业
3C 电子行业由于用工成本增加、产品更新迭代快,各企业都在寻找成本最优的解决方
案。协作机器人小巧轻便,适用于柔性化的生产方式,可以轻松部署在产线上,优势明显。
目前,在 3C 电子行业应用范围和应用前景非常广泛。
摄像头
+PLC+
其中夹具负责固定光导条、机器人负责运动、摄像头负责扫描、
检测结果。此设备结构简单、稳定可靠、使用方便;
其中夹具负责固定光导条、机器人负责运动、摄像头负责扫描、
检测结果。此设备结构简单、稳定可靠、使用方便;
设备采用视觉算法检测光导条的瑕疵,保证检测质量的一致性;
视
觉
的
+PLC+
专用夹具”架构。
设备采用视觉算法检测光导条的瑕疵,保证检测质量的一致性;
设计弹性夹具。同时,在夹具末端安装软性塑料,避免夹具在装夹光导条时,
自动化设备检测光导条,简单易用、稳定可靠,具有广泛的市场前景;
代替人工,提高检测稳定性。
代替人工,提高检测稳定性。
设计弹性夹具。同时,在夹具末端安装软性塑料,避免夹具在装夹光导条时,
自动化设备检测光导条,简单易用、稳定可靠,具有广泛的市场前景;
设备采用视觉算法检测光导条的瑕疵,保证检测质量的一致性;
设备采用视觉算法检测光导条的瑕疵,保证检测质量的一致性;