2020年协作机器人行业发展蓝皮书.pdf - 第28页
2020 年协作机器人产业发 展蓝皮书 27 略,即将移动操 作机器人 看作一个整体。 移动操作路径规 划: 移动操作路径指 在工作环境中 , 移动 操作机器人按 照一定的优化方 式从给定起点到 终点, 并完成机械臂 作业的运 动路径。 根据工作 环境可分为: 已知环 境 模型 (即障碍物 ) 的全局路径规划、 未知环境 (基于环境传感器) 的局部路径规划 和全 局与局部结合路 径规划。 多移动操作机器 人协同作 业: 多个移动…

2020 年协作机器人产业发展蓝皮书
26
主动柔顺性是通过主动柔顺控制,即力控制,使机器人具有主动对外界感知和控制的能
力。根据机器人实现依从运动的特点来看,可以将机器人主动柔顺控制策略归为四大类:阻
抗/导纳控制策略、力/位混合控制策略、自适应控制策略和智能控制策略。目前,大部分协
作机器人力控制由力/位混合控制策略朝自适应控制策略跃进。
为了提高机器人力控精度,引进传感器是必不可少的。机器人力控技术按传感方式可分
为三类:基于电机电流的力控制,基于关节转矩传感器的力控制和基于力/力矩传感器的力
控制。其中,为了实现高精度的机器人应用,如高精度装配作业、恒力打磨(抛光)作业、
柔顺拖动示教等,不少协作机器人企业已经实现了基于力/力矩传感器的力控制。
JAKA 节卡机器人在上海交通大学机器人研究所的支持下,完成了协作机器人动力学模
型精确辨识、高精度外力观测器构建、高鲁棒碰撞检测等无力传感器力控研究,同时完成了
协作机器人高精度轴孔装配、高精度恒力打磨等有力传感器力控研究,在力控技术有深厚的
积累。
3
)
移动操作技术:
由机械臂和自主移动机器人(AMR)组成的复合机器人,即移动操作机器人,其需求的
技术称为移动操作技术。
目
前移动操作技术主要有:
结构设计:根据不同工作环境需求,移动车体和机械臂的结构和功能不同。主要体现在
移动车体的移动方式(轮式、履带式)、机械臂结构(关节模块化、关节分离式)、移动
操作机器人工作空间等。
定位导航方式:为了保证其自由自主的移动,目前大多数相关产品采用激光无反 SLAM、
视觉 SLAM 或混合导航方式。
运动控制策略:移动车体和机械臂的结合使得移动操作机器人具有冗余的自由度(以机
械臂采用 6 轴协作机器人为例),整个系统成为复杂的多输入输出的非线性系统,通常
采取分散控制策略,即将移动车体和机械臂看作两个独立的系统,或者采用集中控制策
型精确辨识、高精度外力观测器构建、高鲁棒碰撞检测等无力传感器力控研究,同时完成了
协作机器人高精度轴孔装配、高精度恒力打磨等有力传感器力控研究,在力控技术有
协作机器人高精度轴孔装配、高精度恒力打磨等有力传感器力控研究,在力控技术有
力矩传感器的力控制。
节卡机器人在上海交通大学机器人研究所的支持下,完成了协作机器人动力学模
型精确辨识、高精度外力观测器构建、高鲁棒碰撞检测等无力传感器力控研究,同时完成了
协作机器人高精度轴孔装配、高精度恒力打磨等有力传感器力控研究,在力控技术有
技
术
:
由机械臂和自主移动机器人(
AMR
技术称为移动操作技术。
主
由机械臂和自主移动机器人(
技术称为移动操作技术。
作
技
术
结构设计:根据不同工作环境需求,移动车体和机械臂的结构和功能不同。主要体现在

2020 年协作机器人产业发展蓝皮书
27
略,即将移动操作机器人看作一个整体。
移动操作路径规划:移动操作路径指在工作环境中,移动操作机器人按照一定的优化方
式从给定起点到终点,并完成机械臂作业的运动路径。根据工作环境可分为:已知环境
模型(即障碍物)的全局路径规划、未知环境(基于环境传感器)的局部路径规划和全
局与局部结合路径规划。
多移动操作机器人协同作业:多个移动操作机器人系统的协同规划主要包含任务规划和
运动规划,即多移动操作机器人的任务分配与阶段记录和多移动操作机器人调度。
此外,由于移动操作技术需要很高的安全性,因此,机械臂往往采用协作机器人,保证
安全性的同时能够与人类协同工作,同时可以实现多任务和多场景的快速切换。
移动操作技术赋予了协作机器人极大的灵活性,使机器人不再拘束于固定工位,具有空
间上的延伸性,能在多任务场景中快速切换。
4
)
AI 技术:
AI 技术赋予机器人学习的能力。机器人作业多为重复任务,且任务种类、行为模式均类
似,机器人可以利用 AI 技术从一个任务中学习一类任务的实现流程。如由上海交通大学机
器人研究所开发的基于视觉的码垛演示编程,可由人进行一次码垛演示,机器人即可学会同
类物体的码垛,自动生成程序进行作业。
移动操作技术赋予了协作机器人极大的灵活性,使机器人不再拘束于固定工位,具有空
此外,由于移动操作技术需要很高的安全性,因此,机械臂往往采用协作机器人,保证
安全性的同时能够与人类协同工作,同时可以实现多任务和多场景的快速切换。
移动操作技术赋予了协作机器人极大的灵活性,使机器人不再拘束于固定工位,具有空
技
术
:
技术赋予机器人学习的能力。机器人作业多为重复任务,且任务种类、行为模式均类
似,机器人可以利用
2020 年协作机器人产业发展蓝皮书
28
第三节 国内外协作机器人技术对比
协作机器人属于工业机器人的衍生品,其三大核心零部件与工业机器人相似,即控制器、
减速器、伺服系统。
在某种程度上,协作机器人核心零部件主要被国外品牌主导。以电机为例,传统的工业
机器人使用交流伺服系统,国产的交流伺服有可以替代国外的产品,但是综合性能与国外产
品还存在一定差距。而协作机器人使用的中空直流电机,主要被科尔摩根垄断,国内可替代
的产品大多参考其设计。
尽管核心零部件尚存在一定的差异,但是在市场需求、应用环境和工艺的要求下,以
JAKA 节卡机器人为代表的国内协作机器人产品在某些方面已经赶超国外品牌。
单从产品看, 2019 年国内厂商推出了七自由度冗余协作机器人,如珞石的 xMate 和
艾利特的 EC75;国内厂商推出了内置力传感器的协作机器人,如 JAKA 节卡机器人 Zu S
系列;国内首推了用于协作机器人的非接触式碰撞检测技术,如越疆科技的协作机器人 CR5。
1
、传感器
近几年越来越多的协作机器人产品开始内置力传感器、相机、夹具等,不仅使得协作机
器人更加智能,而且提前为下游企业做好了部分集成的工作。这 将 提高协作机器人对外部环
境的感知能力,而且有利拓展协作机器人应用领域。
目前市场上的协作机器人内置力传感器或相机或夹具的产品如下表:
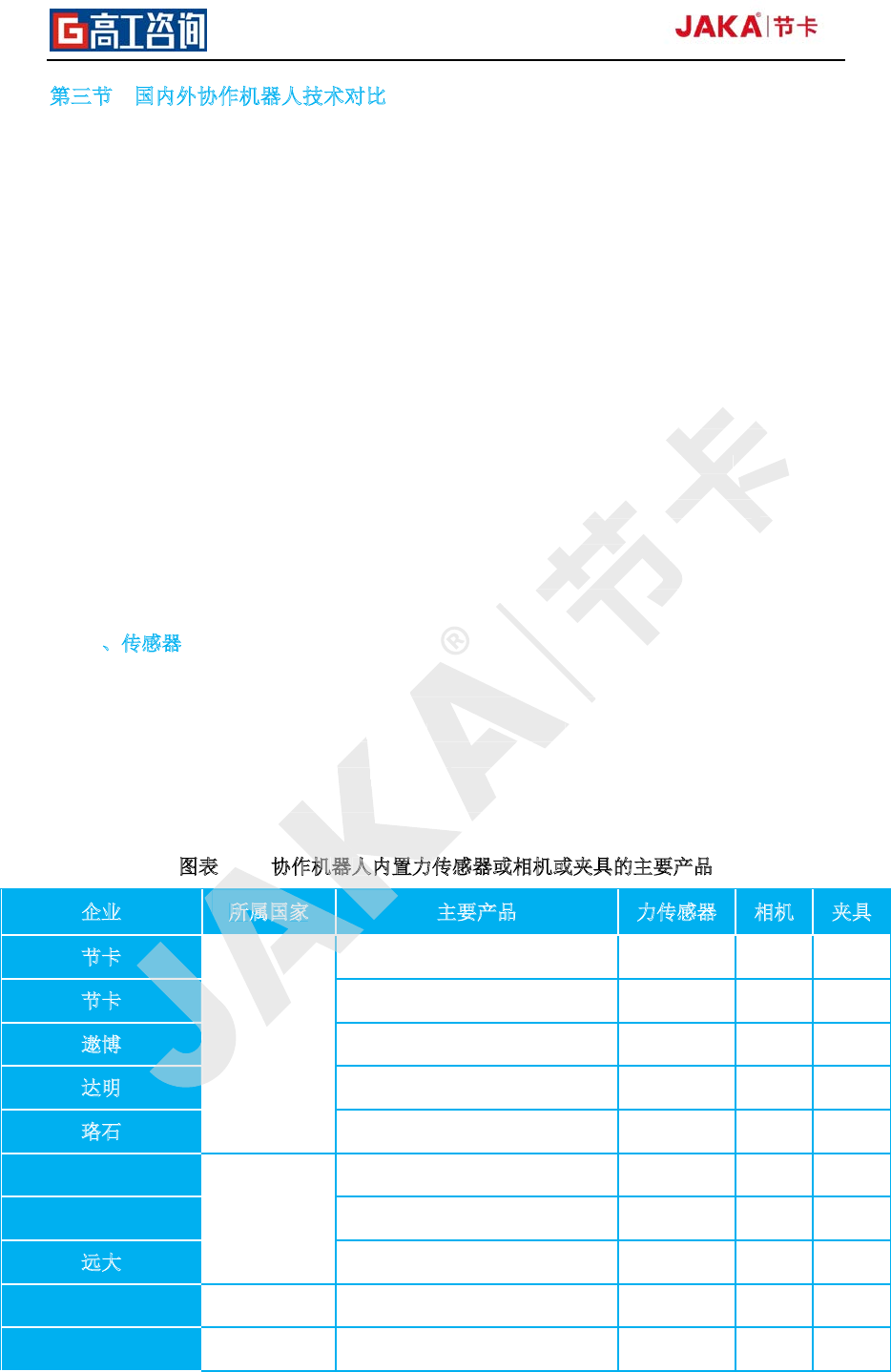
图
表 16 协作机器人内置力传感器或相机或夹具的主要产品
企业 所属国家 主要产品 力传感器 相机 夹具
节卡
中国
Zu 系列/通用版、s 版 有 选配 选配
节卡 All-in-on 共融系列 选配 有 选配
遨博 iV 系列、iF 系列 有 有 无
达明
TM5-700/900
无 有 无
珞石
xMate
有 无 无
KUKA
德国
LBR iiwa 7/14
有 无 无
Franka Emika
PANDA
有 无 有
远大
M6
无 有 有
Rethink 美国
Sawyer
有 有 有
ABB 瑞士
YuMi
无 无 有
年国内厂商推出了七自由度冗余协作机器人,如珞石的
;国内厂商推出了内置力传感器的协作机器人,如
系列;国内首推了用于协作机器人的非接触式碰撞检测技术,如越疆科技的协作机器人
;国内厂商推出了内置力传感器的协作机器人,如
JAKA
系列;国内首推了用于协作机器人的非接触式碰撞检测技术,如越疆科技的协作机器人
尽管核心零部件尚存在一定的差异,但是在市场需求、应用环境和工艺的要求下,
已经赶超国外品牌。
年国内厂商推出了七自由度冗余协作机器人,如珞石的
xMate
系列;国内首推了用于协作机器人的非接触式碰撞检测技术,如越疆科技的协作机器人
相机、
智能,而且提前为下游企业做好了
协作机器人
协作机器人内置力传感器或
相机或夹具的产品如下表:
内
置
力
传
协作机器人内置力传感器或
机
器
人
内
16
所
属
国
家
越来越多的协作机器人产品开始内置力传感器、
部分集成的工作
。这 将
应用
领域。
相机或夹具的产品如下表: