2020年协作机器人行业发展蓝皮书.pdf - 第25页
2020 年协作机器人产业发 展蓝皮书 24 达明 TM5 - 700 /T M5 - 900 / TM1 2 / T M14 6/4 /12/14 6 700/900/ 1300/1 100 ± 0.05 AB B Yu M i 0.5 7 559 ± 0.02 KUKA LBR iiwa7/14 / 7 800/820 ± 0.1/0.15 FAN U C CR - 4i A/7i A / 35 iA , CRX - 10iA 4/…
2020 年协作机器人产业发展蓝皮书
23
(JAKA 节卡机器人 APP 界面)
(
2)灵活性方面
从软件层面来看,协作机器人系统多数具有学习和演化的能力,使其产品具有适应性、
灵活性,它们主要采用增强型学习方法和遗传规划,可实现多机协同作业。
然而,目前的多机器人学习和演化还停留在比较低的行为层次,其学习和演化的任务和
环境也非常简单,当其面对更为复杂的任务和环境时,存在时滞评价和组合爆炸问题;同时,
对多智能体的分布式学习与演化,也与传统的集中式的学习与演化方法有明显区别,还有待
寻找更为有效的行为优化方法。
从硬件层面来看,目前,协作机器人技术产品多数为 6 自由度及以上的多关节机器人,
自重及负载都较小,产品安装方式及其移动部署相对灵活。适用于柔性、灵活度和精准度要
求较高的行业如电子、医药、精密仪器等行业,满足更多工业生产及服务行业的操作需要。
图
表 14 相关协作机器人产品技术参数
企业 主要产品 负载(kg) 自由度 工作范围(mm)
重复定位精度
(mm)
UR
UR3/5/10/16(e)
3/5/10/16 6 500/850/1300/900 ±0.03
节卡 Zu 3/7/12/18(s)
3/7/12/18 6 626/819/1327/1073 ±0.03
遨博
AUBO-i3/5/10/16 3/5/10/16 6 625/886.5/1350/967.5
i3 和 i5:±0.02
i10 和 i16:±0.1
界面)
从软件层面来看,协作机器人系统多数具有学习和演化的能力,使其产品具有适应性、
然而,目前的多机器人学习和演化还停留在比较低的行为层次,其学习和演化的任务和
环境也非常简单,当其面对更为复杂的任务和环境时,存在时滞评价和组合爆炸问题;同时,
对多智能体的分布式学习与演化,也与传统的集中式的学习与演化方法有明显区别,还有待
环境也非常简单,当其面对更为复杂的任务和环境时,存在时滞评价和组合爆炸问题;同时,
对多智能体的分布式学习与演化,也与传统的集中式的学习与演化方法有明显区别,还有待
对多智能体的分布式学习与演化,也与传统的集中式的学习与演化方法有明显区别,还有待
寻找更为有效的行为优化方法。
从硬件层面来看,
目前,协作机器人技术产品多数为
自重及负载都较小,产品安装方式及其移动部署相对灵活。适用于柔性、灵活度和精准度要
从软件层面来看,协作机器人系统多数具有学习和演化的能力,使其产品具有适应性、
灵活性,它们主要采用增强型学习方法和遗传规划,可实现多机协同作业。
然而,目前的多机器人学习和演化还停留在比较低的行为层次,其学习和演化的任务和
环境也非常简单,当其面对更为复杂的任务和环境时,存在时滞评价和组合爆炸问题;同时,
从硬件层面来看,
自重及负载都较小,产品安装方式及其移动部署相对灵活。适用于柔性、灵活度和精准度要
求较高的行业如电子、医药、精密仪器等行业,满足更多工业生产及服务行业的操作需要。
2020 年协作机器人产业发展蓝皮书
24
达明
TM5-700/TM5-
900/TM12/TM14
6/4/12/14 6 700/900/1300/1100 ±0.05
ABB
YuMi 0.5 7 559 ±0.02
KUKA
LBR iiwa7/14 / 7 800/820 ±0.1/0.15
FANUC
CR-4iA/7iA/35iA,CRX-
10iA
4/7/35,10
6
550/717/1813,1249
/
资料来源:高工机器人产业研究所(
GGII
)整理
(3)安全性方面
安全问题作为实现人机协作一个前提条件,只有保障了操作人员的人身安全,才能更好
的协同工作,提高企业效率。
为有效规范协作机器人设计及安全,国际标准化组织于 2016 年 3 月发布了《ISO/TS
15066 Robots and robotic devices--Collaborative robots》标准,该标准作为支持 ISO 10218
“工业机器人安全标准”的补充,进一步明确了协作机器人的设计细节及系统安全技术规范,
主要要求如下:
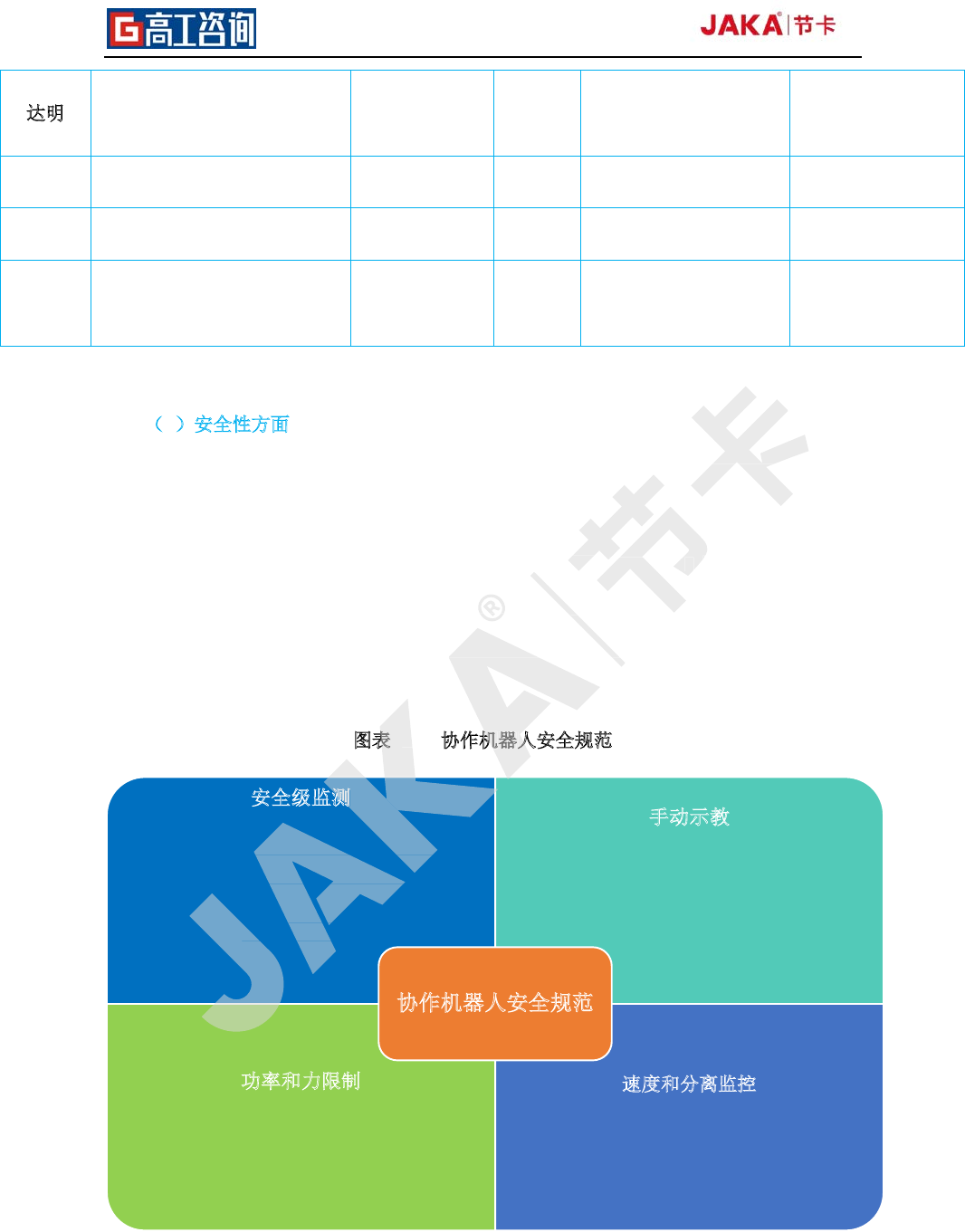
图
表 15 协作机器人安全规范
资料来源:高工机器人产业研究所(
GGII
)整理
安全级监测
(Safety-rated monitored stop)
安全等级的受控制动:人员碰触,机器人
应停止动作。
手动示教
(Hand Guiding)
机器人可由人直接的操作引导来动作。
功率和力限制
(Power and force limiting)
在一定范围内,机器人的力道和功率都应
有所限制。
速度和分离监控
(Speed and separation monitoring)
警戒区域动作调控,人员进入作业区自动减
速。
协作机器人安全规范
安全问题作为实现人机协作一个前提条件,只有保障了操作人员的人身安全,才能更好
为有效规范协作机器人设计及安全,国际标准化组织于
2016
2016
年
3
月发布了《
》标准,该标准作为支持
安全问题作为实现人机协作一个前提条件,只有保障了操作人员的人身安全,才能更好
为有效规范协作机器人设计及安全,国际标准化组织于
Collaborative robots
》标准,该标准作为支持
“工业机器人安全标准”的补充,进一步明确了协作机器人的设计细节及系统安全技术规范,
表
15
监
测
rated monitored stop
rated monitored stop
安全等级的受控制动:人员碰触,机器人
应停止动作。
“工业机器人安全标准”的补充,进一步明确了协作机器人的设计细节及系统安全技术规范,
机
器
人
安全等级的受控制动:人员碰触,机器人
应停止动作。
Collaborative robots
Collaborative robots
2020 年协作机器人产业发展蓝皮书
25
(4)共融性
协作机器人的共融性主要指协作机器人系统易于嵌入或接纳其它系统、易于转化先进的
理论与算法,使得自身功能不局限于机器人制造商的定义,而具有极大的扩展性。
各协作机器人企业都通过开发硬件或者软件,抑或两者兼备的方式确保其能实现人机协
同作业,但不同企业实现途径不一。
在协作机器人 ROS
框架与丰富的二次开发接口支持下,协作机器人可快速完成角色转
变。视
觉技术、力控技术、移动操作技术、AI 技术均可快速地融入协作机器人操作系统,
衍生出丰富的功能以适应不同的应用需求。
1)
视觉技术:
机器人视觉系统有单目视觉、双目立体视觉、多目视觉和全景视觉等,根据功能不同可
分为视觉引导与视觉检测。视觉引导包含引导和定位。视觉引导与定位要求机器人能快速地
找到目标物的位置,并自主规划轨迹快速到达目标点机器人与视觉技术结合。该技术能完成
更精准的组装、焊接、处理、搬运等工作。视觉检测主要包含缺陷检测、外观检测等。视觉
系统检测目标物外观特性,确定目标质量,进而引导机器人完成相应的操作。
2)
力控技术:
为解决机器人研究中的核心矛盾之一,即机器人在特定接触环境操作时对可以产生任意
作用力柔性的高要求和机器人在自由空间操作时对位置伺服刚度及机械结构刚性的高要求
之间的矛盾,引入了柔顺性(即柔顺控制,机器人能够对接触环境顺从的能力)这一概念,
其可以分为被动柔顺性和主动柔顺性。
其中,被动柔顺性是凭借一些辅助的柔顺机构,即被动柔顺机构(如弹簧、阻尼等),
来实现在机器人末端柔顺操作(如轴孔装配等),此技术适合于较低精度的装配作业。
均可快速地融入协作机器人操作系统,
机器人视觉系统有单目视觉、双目立体视觉、多目视觉和全景视觉等,根据功能不同可
框架与丰富的二次开发接口支持下,协作机器人可快速完成角色转
均可快速地融入协作机器人操作系统,
机器人视觉系统有单目视觉、双目立体视觉、多目视觉和全景视觉等,根据功能不同可
引导和定位。视觉引导与
更精准的组装、焊接、处理、搬运等工作。视觉检测主要包含缺陷检测、外观检测
系统检测目标物外观特性,确定目标质量,进而引导机器人完成相应的操作。
系统检测目标物外观特性,确定目标质量,进而引导机器人完成相应的操作。
引导和定位。视觉引导与
找到目标物的位置,并自主规划轨迹快速到达目标点机器人与视觉技术结合。该技术能完成
更精准的组装、焊接、处理、搬运等工作。视觉检测主要包含缺陷检测、外观检测
系统检测目标物外观特性,确定目标质量,进而引导机器人完成相应的操作。
控
技
术
机器人视觉系统有单目视觉、双目立体视觉、多目视觉和全景视觉等,根据功能不同可
机器人视觉系统有单目视觉、双目立体视觉、多目视觉和全景视觉等,根据功能不同可