2020年协作机器人行业发展蓝皮书.pdf - 第29页
2020 年协作机器人产业发 展蓝皮书 28 第三节 国内外协作机器人技术对比 协作机器人属于 工业机器 人的衍生品, 其三大核心零部件与工业 机器人相 似, 即控制器、 减速器、伺服系 统。 在 某种程度上, 协作机 器人核 心零部件主要 被国外品 牌主导。 以电机为 例, 传统的工业 机器人使用交流 伺服系统 , 国产 的交流伺服有 可以替代国外的 产品, 但是综合性能与国 外产 品还存在一定差 距。 而协作机器人使 用的中空 直流…

2020 年协作机器人产业发展蓝皮书
27
略,即将移动操作机器人看作一个整体。
移动操作路径规划:移动操作路径指在工作环境中,移动操作机器人按照一定的优化方
式从给定起点到终点,并完成机械臂作业的运动路径。根据工作环境可分为:已知环境
模型(即障碍物)的全局路径规划、未知环境(基于环境传感器)的局部路径规划和全
局与局部结合路径规划。
多移动操作机器人协同作业:多个移动操作机器人系统的协同规划主要包含任务规划和
运动规划,即多移动操作机器人的任务分配与阶段记录和多移动操作机器人调度。
此外,由于移动操作技术需要很高的安全性,因此,机械臂往往采用协作机器人,保证
安全性的同时能够与人类协同工作,同时可以实现多任务和多场景的快速切换。
移动操作技术赋予了协作机器人极大的灵活性,使机器人不再拘束于固定工位,具有空
间上的延伸性,能在多任务场景中快速切换。
4
)
AI 技术:
AI 技术赋予机器人学习的能力。机器人作业多为重复任务,且任务种类、行为模式均类
似,机器人可以利用 AI 技术从一个任务中学习一类任务的实现流程。如由上海交通大学机
器人研究所开发的基于视觉的码垛演示编程,可由人进行一次码垛演示,机器人即可学会同
类物体的码垛,自动生成程序进行作业。
移动操作技术赋予了协作机器人极大的灵活性,使机器人不再拘束于固定工位,具有空
此外,由于移动操作技术需要很高的安全性,因此,机械臂往往采用协作机器人,保证
安全性的同时能够与人类协同工作,同时可以实现多任务和多场景的快速切换。
移动操作技术赋予了协作机器人极大的灵活性,使机器人不再拘束于固定工位,具有空
技
术
:
技术赋予机器人学习的能力。机器人作业多为重复任务,且任务种类、行为模式均类
似,机器人可以利用
2020 年协作机器人产业发展蓝皮书
28
第三节 国内外协作机器人技术对比
协作机器人属于工业机器人的衍生品,其三大核心零部件与工业机器人相似,即控制器、
减速器、伺服系统。
在某种程度上,协作机器人核心零部件主要被国外品牌主导。以电机为例,传统的工业
机器人使用交流伺服系统,国产的交流伺服有可以替代国外的产品,但是综合性能与国外产
品还存在一定差距。而协作机器人使用的中空直流电机,主要被科尔摩根垄断,国内可替代
的产品大多参考其设计。
尽管核心零部件尚存在一定的差异,但是在市场需求、应用环境和工艺的要求下,以
JAKA 节卡机器人为代表的国内协作机器人产品在某些方面已经赶超国外品牌。
单从产品看, 2019 年国内厂商推出了七自由度冗余协作机器人,如珞石的 xMate 和
艾利特的 EC75;国内厂商推出了内置力传感器的协作机器人,如 JAKA 节卡机器人 Zu S
系列;国内首推了用于协作机器人的非接触式碰撞检测技术,如越疆科技的协作机器人 CR5。
1
、传感器
近几年越来越多的协作机器人产品开始内置力传感器、相机、夹具等,不仅使得协作机
器人更加智能,而且提前为下游企业做好了部分集成的工作。这 将 提高协作机器人对外部环
境的感知能力,而且有利拓展协作机器人应用领域。
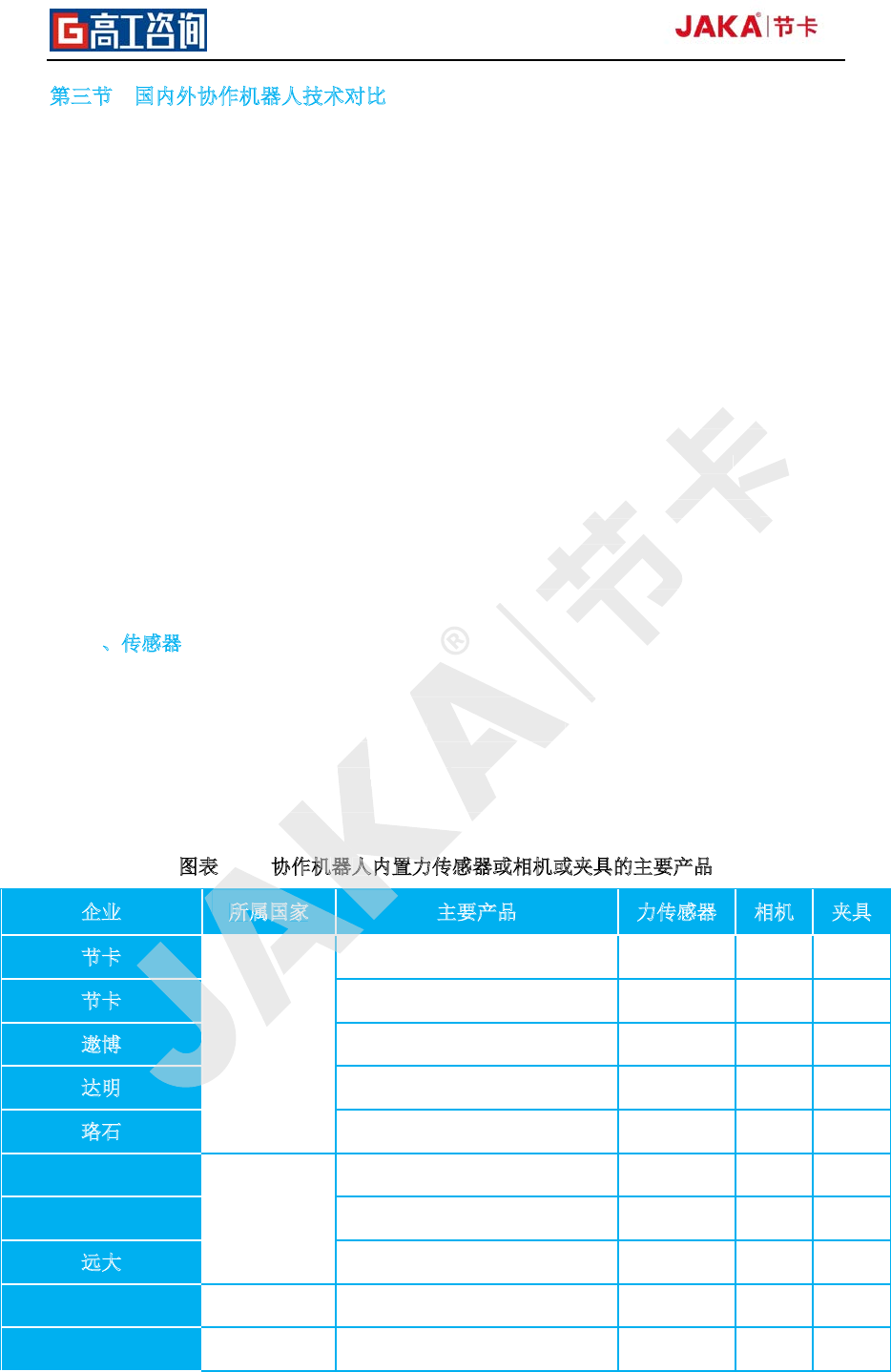
目前市场上的协作机器人内置力传感器或相机或夹具的产品如下表:
图
表 16 协作机器人内置力传感器或相机或夹具的主要产品
企业 所属国家 主要产品 力传感器 相机 夹具
节卡
中国
Zu 系列/通用版、s 版 有 选配 选配
节卡 All-in-on 共融系列 选配 有 选配
遨博 iV 系列、iF 系列 有 有 无
达明
TM5-700/900
无 有 无
珞石
xMate
有 无 无
KUKA
德国
LBR iiwa 7/14
有 无 无
Franka Emika
PANDA
有 无 有
远大
M6
无 有 有
Rethink 美国
Sawyer
有 有 有
ABB 瑞士
YuMi
无 无 有
年国内厂商推出了七自由度冗余协作机器人,如珞石的
;国内厂商推出了内置力传感器的协作机器人,如
系列;国内首推了用于协作机器人的非接触式碰撞检测技术,如越疆科技的协作机器人
;国内厂商推出了内置力传感器的协作机器人,如
JAKA
系列;国内首推了用于协作机器人的非接触式碰撞检测技术,如越疆科技的协作机器人
尽管核心零部件尚存在一定的差异,但是在市场需求、应用环境和工艺的要求下,
已经赶超国外品牌。
年国内厂商推出了七自由度冗余协作机器人,如珞石的
xMate
系列;国内首推了用于协作机器人的非接触式碰撞检测技术,如越疆科技的协作机器人
相机、
智能,而且提前为下游企业做好了
协作机器人
协作机器人内置力传感器或
相机或夹具的产品如下表:
内
置
力
传
协作机器人内置力传感器或
机
器
人
内
16
所
属
国
家
越来越多的协作机器人产品开始内置力传感器、
部分集成的工作
。这 将
应用
领域。
相机或夹具的产品如下表:

2020 年协作机器人产业发展蓝皮书
29
UR 丹麦 UR e 系列 有 无 无
DENSO 日本
COBOTTA
有 无 有
Kinova Robotics 加拿大
Jaco2
无 无 有
Doosan Robotics 韩国
M0609/M0617/M1013/M1509
有 无 无
数据来源:公开资料,高工机器人产业研究所(
GGII
)整理
2、
冗余自由度
就机械臂而言,当机械臂具有比刚好能完成给定任务所需要自由度更多的自由度时候,
就具有了运动学上的冗余度。一般任务要求末端执行器跟踪一个运动轨迹,这就需要 6 个自
由度,于是大多数工业机械臂都是 6 自由度,因此具有 7 个或者更多关节的机械臂被当成
本质上冗余的机械臂。
3、
无线示教
由 JAKA 节卡机器人首创机器人无线示教技术不仅拓展了机器人在多个系统和平台的
示教方式,而且解除了线束对操作人员的限制,同时增强了现场人员和设备的安全性。
从 2019 年协作机器人市场新品可以看出,国内企业采用无线示教的趋势越来越明显,
其中,7 家国内协作机器人新品(六轴协作)有 4 家支持无线示教,4 家国外协作机器人新
品有 1 家支持无线示教。
图
表 17 2019 年协作机器人市场新品盘点
企业名称 产品型号 主要特点
节卡 小助系列/All-in-one 共融系列 负载 3kg、7kg、12kg、18kg,内置力传感器,无线示教。
新松
GCR14-1400
负载 14kg,工作半径 1400mm。
遨博 i16、iV 系列、iF 系列 负载 16kg,支持智能视觉,内置力传感器。
配天
MoKi 5
负载 5kg,三色状态指示灯,无线示教。
大象
Catbot
负载 5kg,无线示教,语音控制。
溱者 chin 系列 负载 8kg,外轴扩展。
越疆
DOBOT CR5
负载 5kg,无线示教,无接触碰撞检测。
发那科
CRX-10 iA
负载 10kg,开放的外设接口。
安川
MOTOMAN-HC20DT
负载 20kg,防护等级 IP67,食品行业专用。
优傲
UR16e
负载 16kg,内置力传感器。
远大 M6 升级版 无线示教,内置视觉,内置夹具。
数据来源:公开资料,高工机器人产业研究所(
GGII
)整理
机器人无线示教技术不仅拓展了机器人
机器人无线示教技术不仅拓展了机器人
在多个系统和
限制,同时增强了现场人员和设备的安全性。
就具有了运动学上的冗余度。一般任务要求末端执行器跟踪一个运动轨迹,这就需要
或者更多关节
的机械臂被
机器人无线示教技术不仅拓展了机器人
限制,同时增强了现场人员和设备的安全性。
,国内企业采用无线示教的趋势越来越明显,
新品(六轴协作)有
2019
年
协
作
表
17
品
型
in
-
one
共融系列
系列
年协作机器人市场新品可以看出
,国内企业采用无线示教的趋势越来越明显,
新品(六轴协作)有
4
家支持无线示教,
机
器
GCR14
-
1400
系列、
atbot
限制,同时增强了现场人员和设备的安全性。
限制,同时增强了现场人员和设备的安全性。