6OM-1602-004_w.pdf - 第29页
6OM-1602 2-8 第二章 1.3 认识 ( 识别 ) 数据 1.3 认识 ( 识别 ) 数据 1.3.1 无引脚 No. 数据名 元件形状 参照项目 圆筒 方形 异形 1 照明方式 C01_01 2 认识 ( 识别 ) 数据设定 C01_02 3 认识处理水平 ( 识别处理水准 ) C01_03 4 透过认识 ( 识别 ) 算法 反射认识 ( 识别 ) 算法 C01_04 11 点…
6OM-1602
第二章 1.2 形状数据
2-7
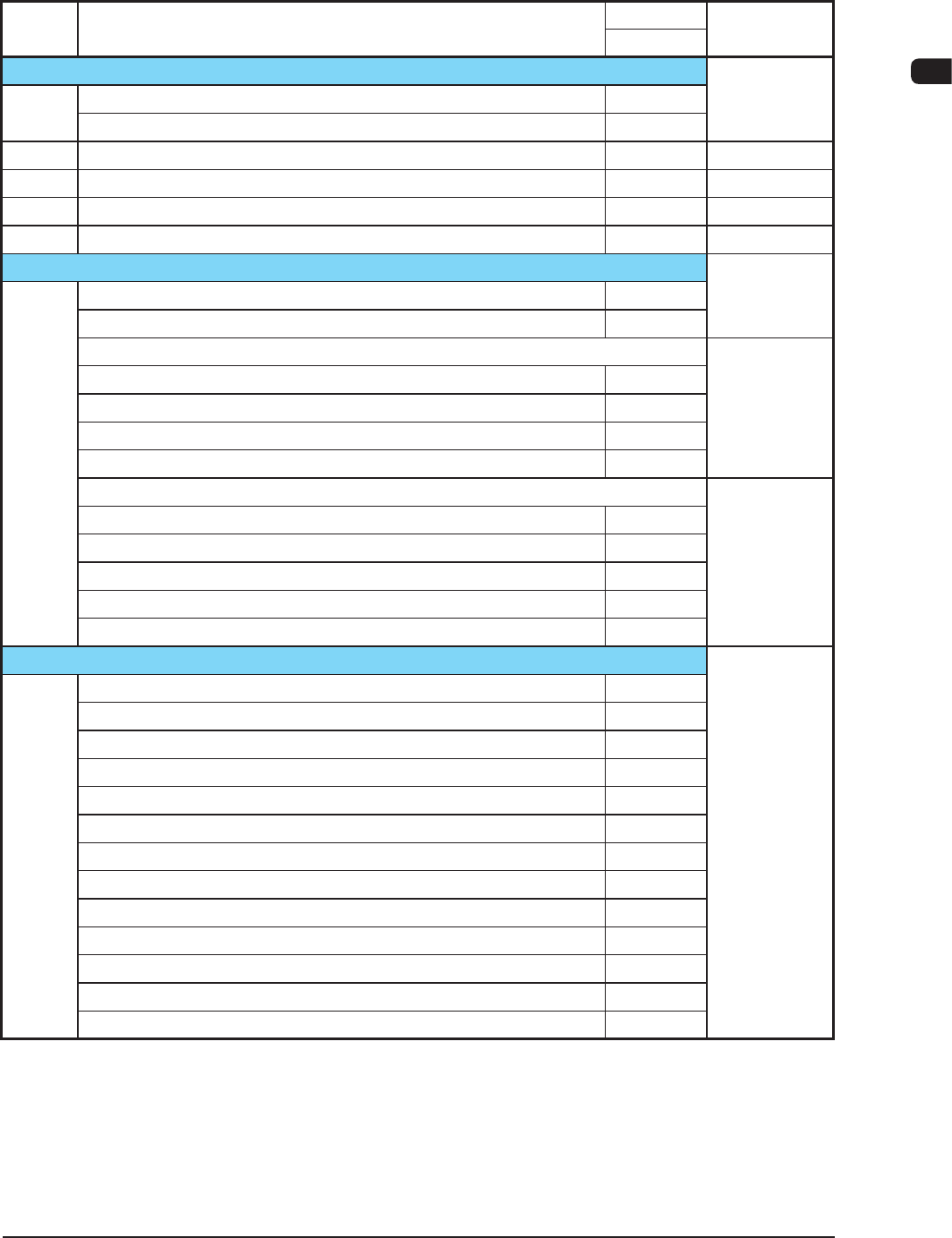
1.2.4 特 殊
形状数据一览表
No. 数据名
元件形状
参照项目
特殊
元件尺寸 B01_02
1 元件尺寸
(2) T( 厚度 )、t( 厚度 )、Ut( 厚度 )
2 外形尺寸 1、2、3、4
B01_03
3 元件重量
B01_04
4 有无极性
B01_05
6 元件图解追加表示
B01_08
形状数据 B01_17
7 类型数
组数
类型编号 B01_18
(1) 形状
(2) 幅 ( 宽度 )
(3) 高度
(4) 明暗
组编号 B01_19
(1) 类型编号
(2) 位置 宽度方向、长度方向
(3) 数
(4) 间距
(5) 方向
元件图解数据 B01_20
8 类型数
组数
类型编号
(1) 形状
(2) 幅 ( 宽度 )
(3) 高度
(3) 方向
组编号
(1) 类型编号
(2) 位置 宽度方向、长度方向
(3) 数
(4) 间距
(5) 方向
TB5
1201-003
6OM-1602
2-8
第二章 1.3 认识 ( 识别 ) 数据
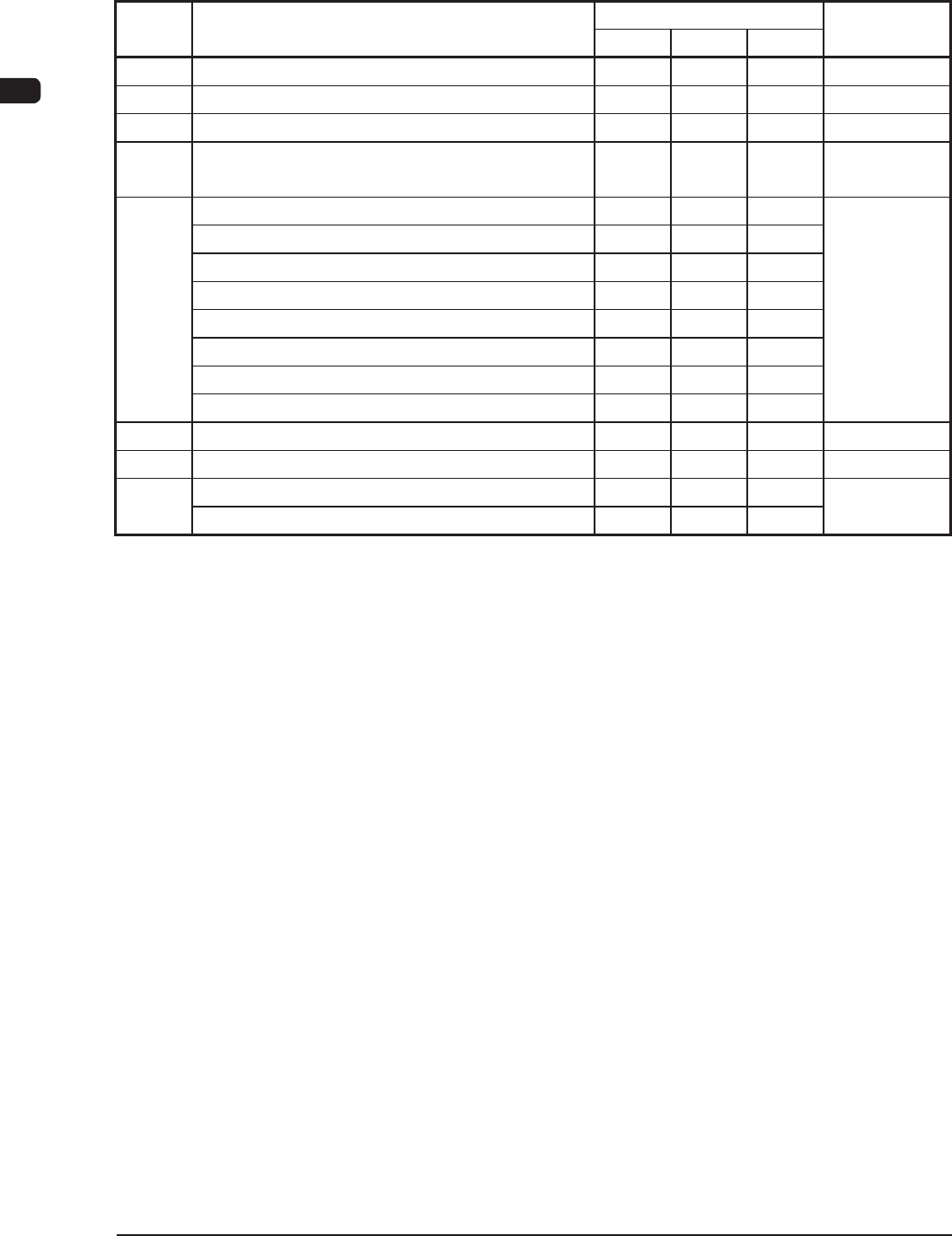
1.3 认识 ( 识别 ) 数据
1.3.1 无引脚
No. 数据名
元件形状
参照项目
圆筒 方形 异形
1 照明方式
C01_01
2 认识 ( 识别 ) 数据设定
C01_02
3 认识处理水平 ( 识别处理水准 )
C01_03
4 透过认识 ( 识别 ) 算法
反射认识 ( 识别 ) 算法
C01_04
11 点灯方式指定
C01_11
(1) 透过
(2) 反射 3-1( 环状 ( 上 - 上 ))
(3) 反射 3-2( 环状 ( 上 - 下 ))
(4) 反射 2( 同轴 )
(5) 反射 1-1( 环状 ( 下 - 上 ))
(6) 反射 1-2( 环状 ( 下 - 中 ))
(7) 反射 1-3( 环状 ( 下 - 下 ))
12 指定照片拍摄 ( 图像摄像 ) 方法
C01_12
13 视野指定
C01_13
14 元件尺寸允许值设定
C01_14
(1) 元件尺寸允许值 X( 横 )、Y( 纵 )
TB6
1201-002
6OM-1602
第二章 1.3 认识 ( 识别 ) 数据
2-9
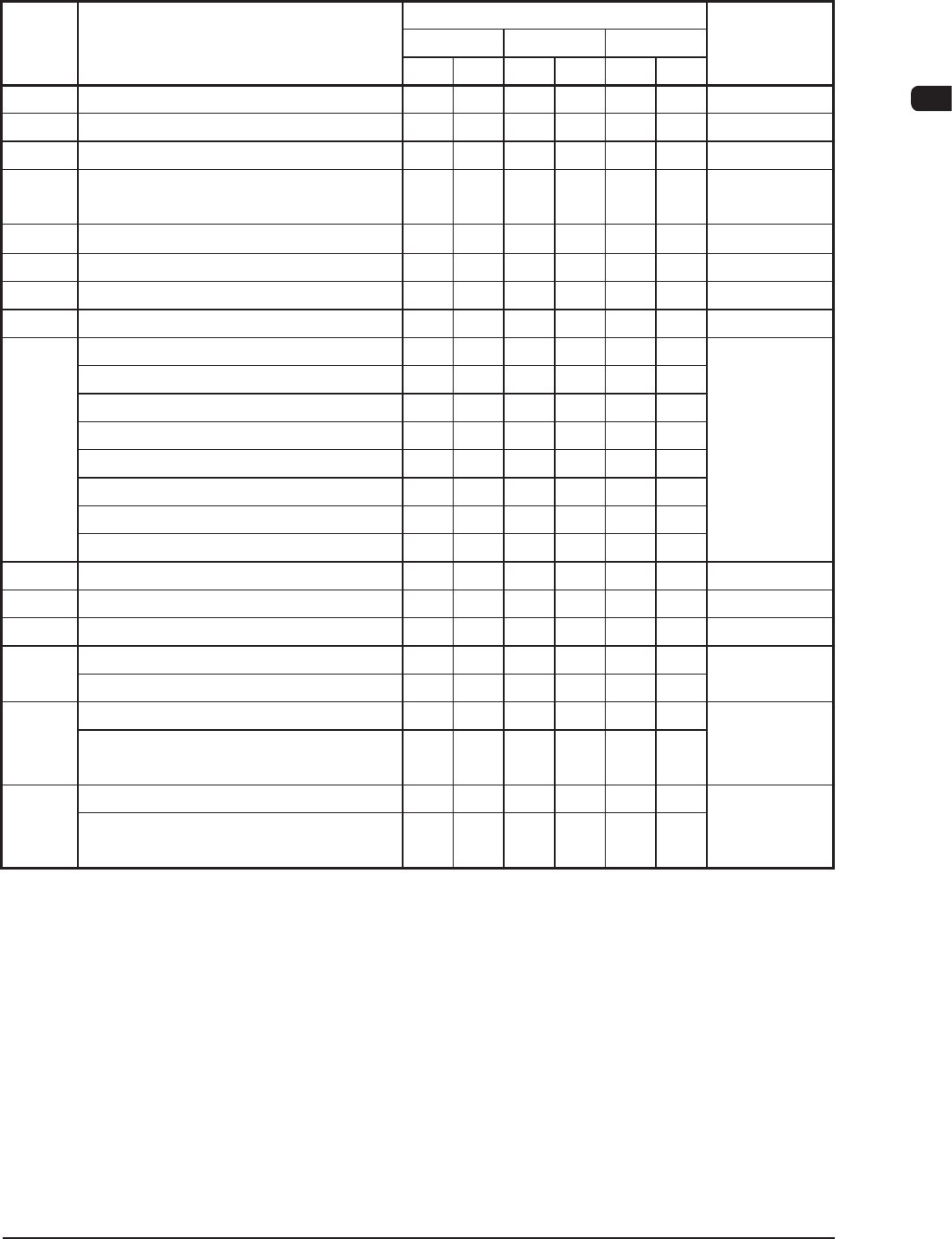
1.3.2 带引脚
认识 ( 识别 ) 数据一览表
No. 数据名
元件形状
参照项目IC 连接器 其他
简单 复杂 简单 复杂 简单 复杂
1 照明方式
C01_01
2 认识 ( 识别 ) 数据设定
C01_02
3 认识处理水平 ( 识别处理水准 )
C01_03
4 透过认识 ( 识别 ) 算法
反射认识 ( 识别 ) 算法
C01_04
5
检出方法
C01_05
6 检出前处理
C01_06
7 管脚 ( 引脚 ) 角度检出异常设定 ( 判定 )
C01_07
8 检出窗口
C01_08
11 点灯方式指定
C01_11
(1) 透过
(2) 反射 3-1( 环状 ( 上 - 上 ))
(3) 反射 3-2( 环状 ( 上 - 下 ))
(4) 反射 2( 同轴 )
(5) 反射 1-1( 环状 ( 下 - 上 ))
(6) 反射 1-2( 环状 ( 下 - 中 ))
(7) 反射 1-3( 环状 ( 下 - 下 ))
12 指定照片拍摄 ( 图像摄像 ) 方法
C01_12
13 视野指定
C01_13
15 外形尺寸判定 / 外形尺寸允许值
- - - - C01_15
16 管脚 ( 引脚 ) 宽度判定
- -
C01_16
管脚 ( 引脚 ) 宽度允许值
- -
17 管脚 ( 引脚 ) 位置 ( 宽度方向 ) 判定
C01_17
管脚 ( 引脚 ) 位置 ( 宽度方向 ) 允许
值
18 管脚 ( 引脚 ) 位置 ( 长度方向 ) 判定
- - - - C01_18
管脚 ( 引脚 ) 位置 ( 长度方向 ) 允许
值
- - - -
1201-003