NM-MF11ABM221.pdf - 第43页
BM122/123/221/231 元件识别数据制作方法 3.2 穿透 箱形 E35CCC-50- 161-B0 3.2-2 3.2.2 穿透 箱 形-只计算上下 边的倾斜 BM122/1 23 不能使用。 Body Dimension/ Exter nal D im [ mm] Lead C ount Parts Class Parts Ty pe L1 L2 W1 W2 Lt Wt Nu Nd Nl Nr 100 1 Lead …
BM122/123/221/231
元件识别数据制作方法
3.2 穿透 箱形
E35CCC-50-161-B0
3.2-1
3.2. 穿透 箱形
E35CCC-50-161-B0
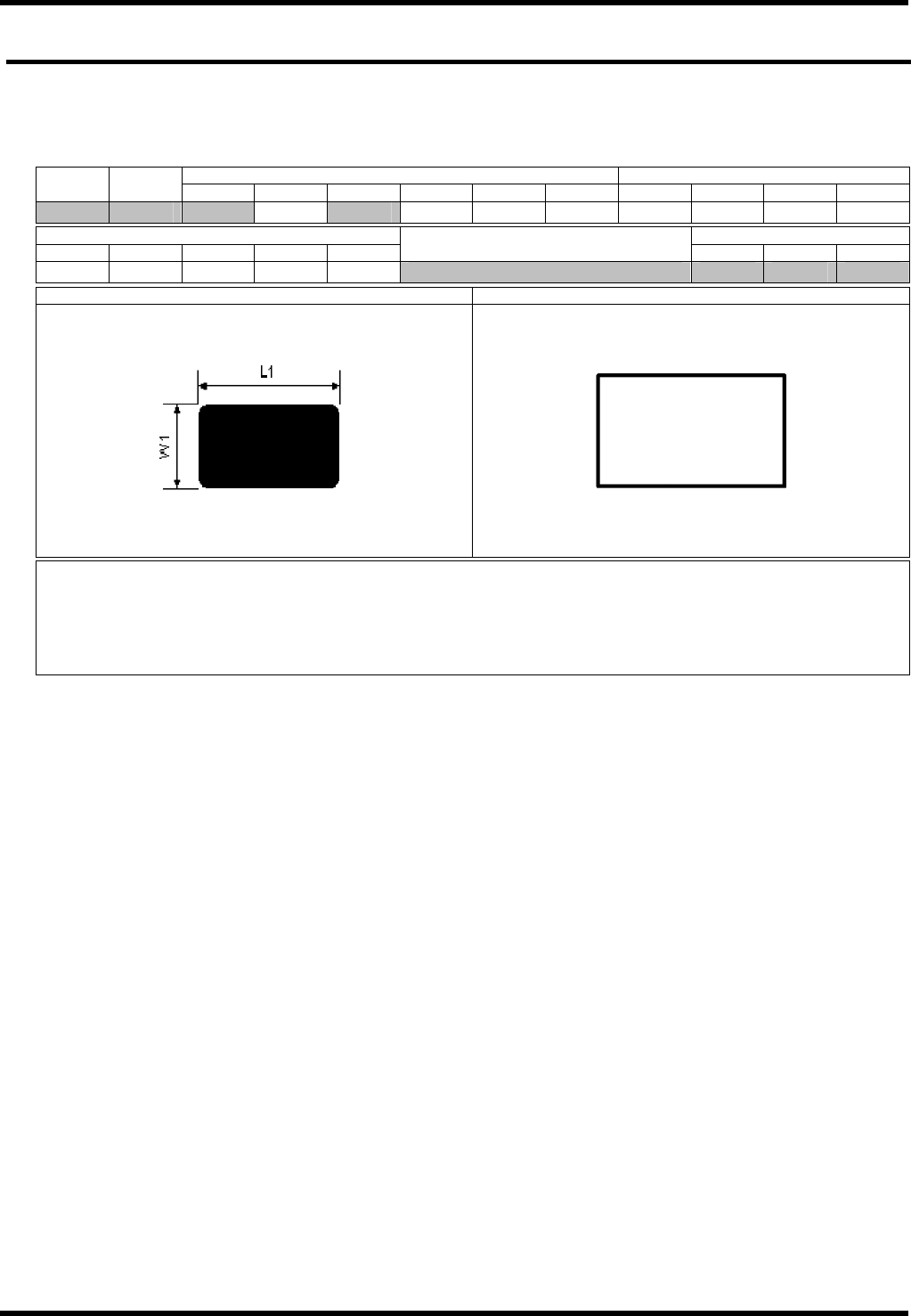
3.2.1 穿透 箱形-标准
BM122/123 不能使用。
Body Dimension/External Dim [mm] Lead Count Parts
Class
Parts
Type
L1 L2 W1 W2 Lt Wt Nu Nd Nl Nr
100 0
Lead Size [mm] Lighting
d1 d2 h1 h2 Pt
Camera
Upper Middle Lower
2D Large FOV 0 0 0
Component Size Definition Drawing Recognition Shape
Recognition Option
Binary Image Processing
Mounting Position Offset
No Orientation Estimation
No Center Position Estimation
Display Estimated Results
Tolerance for Orientation
Tolerance for Center Position
Detail Dimension Check
Nozzle Position Check
Lighting Check
=提示=
需要机器可选项的穿透部分以及吸嘴。
通过反射板穿透光形成的元件轮廓进行识别。
对于反射部分(电极或者元件)较少的元件有效。
四边必须由直线(中间中断的直线也可)构成。
识别中心为四个边构成的长方形的中心。
必须有二进制水平的显示。
为了看清楚元件的外形,请设定在二进制水平上。
只可使用 2D 大视野摄像机。
需要使用穿透照明装置(可选)以及穿透识别吸嘴(可选)。
BM122/123/221/231
元件识别数据制作方法
3.2 穿透 箱形
E35CCC-50-161-B0
3.2-2
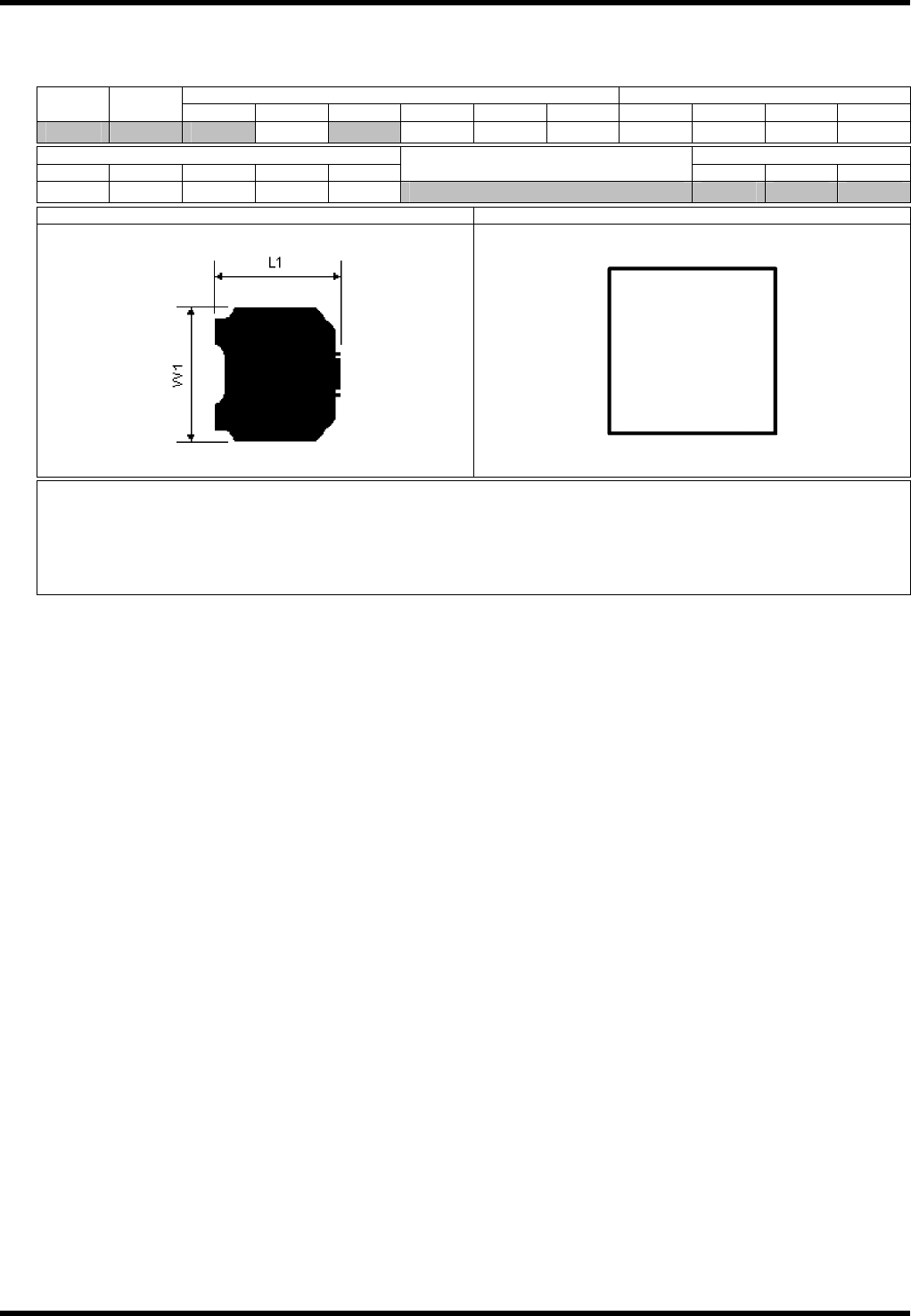
3.2.2 穿透 箱形-只计算上下边的倾斜
BM122/123 不能使用。
Body Dimension/External Dim [mm] Lead Count Parts
Class
Parts
Type
L1 L2 W1 W2 Lt Wt Nu Nd Nl Nr
100 1
Lead Size [mm] Lighting
d1 d2 h1 h2 Pt
Camera
Upper Middle Lower
2D Large FOV 0 0 0
Component Size Definition Drawing Recognition Shape
Recognition Option
Binary Image Processing
Mounting Position Offset
No Orientation Estimation
No Center Position Estimation
Display Estimated Results
Tolerance for Orientation
Tolerance for Center Position
Detail Dimension Check
Nozzle Position Check
Lighting Check
=提示=
需要机器可选项的穿透部分以及吸嘴。
通过反射板穿透光形成的元件轮廓进行识别。
对于反射部分(电极或者元件)较少的元件有效。
四边必须由直线(中间中断的直线也可)构成。
识别中心为四个边构成的长方形的中心。
必须有二进制水平的显示。
为了看清楚元件的外形,请设定在二进制水平上。
只可使用 2D 大视野摄像机。
需要使用穿透照明装置(可选)以及穿透识别吸嘴(可选)。
BM122/123/221/231
元件识别数据制作方法
3.2 穿透 箱形
E35CCC-50-161-B0
3.2-3
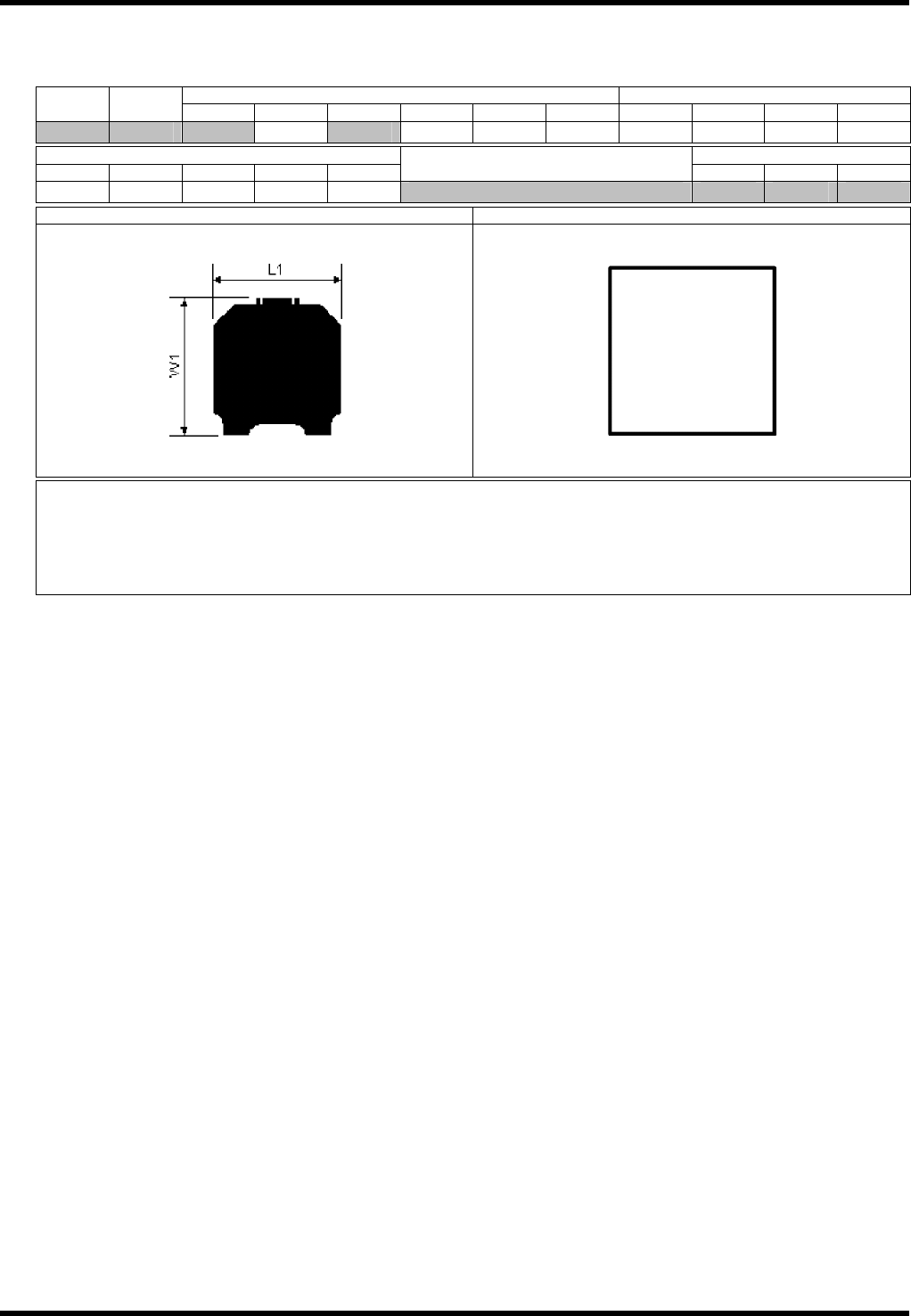
3.2.3 穿透 箱形-只计算左右边的倾斜
BM122/123 不能使用。
Body Dimension/External Dim [mm] Lead Count Parts
Class
Parts
Type
L1 L2 W1 W2 Lt Wt Nu Nd Nl Nr
100 2
Lead Size [mm] Lighting
d1 d2 h1 h2 Pt
Camera
Upper Middle Lower
2D Large FOV 0 0 0
Component Size Definition Drawing Recognition Shape
Recognition Option
Binary Image Processing
Mounting Position Offset
No Orientation Estimation
No Center Position Estimation
Display Estimated Results
Tolerance for Orientation
Tolerance for Center Position
Detail Dimension Check
Nozzle Position Check
Lighting Check
=提示=
需要机器可选项的穿透照明部分以及吸嘴。
通过反射板穿透光形成的元件轮廓进行识别。
对于反射部分(电极或者元件)较少的元件有效。
左右边必须由直线(中间中断的直线也可)构成。
识别中心为四个边构成的长方形的中心。
必须有二进制水平的显示。
为了看清楚元件的外形,请设定在二进制水平上。
只可使用 2D 大视野摄像机。
需要使用穿透照明装置(可选)以及穿透识别吸嘴(可选)。