NM-MF11ABM221.pdf - 第55页
BM122/123/221/231 元件识别数据制作方法 3.4 反射 电 极型、导线型 E35CCC-50- 111-B0 3.4-6
BM122/123/221/231
元件识别数据制作方法
3.4 反射 电极型、导线型
E35CCC-50-111-B0
3.4-5
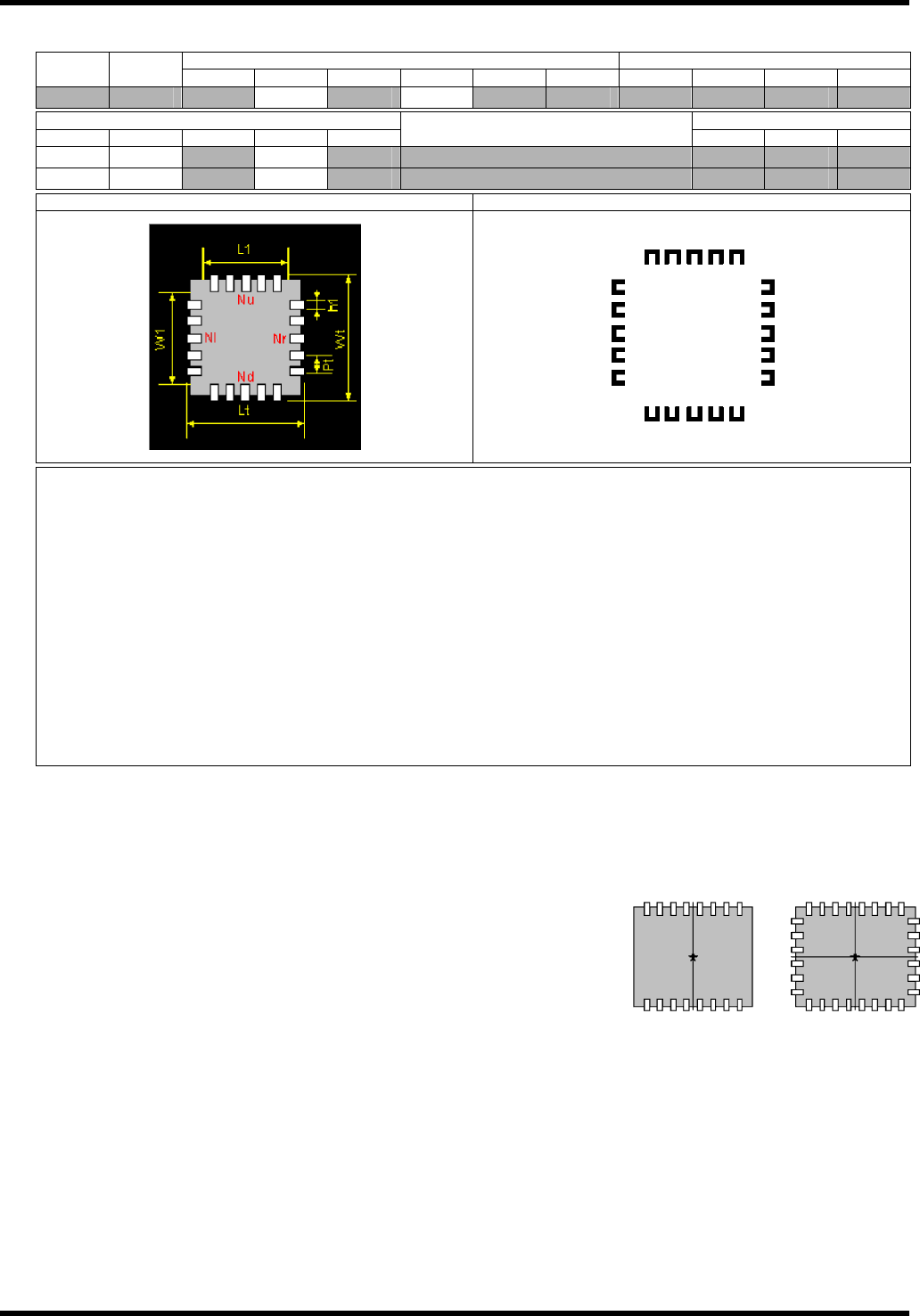
3.4.5 反射 导线型-PLCC/SOJ/LCC
Body Dimension/External Dim [mm] Lead Count Parts
Class
Parts
Type
L1 L2 W1 W2 Lt Wt Nu Nd Nl Nr
104 2
Lead Size [mm] Lighting
d1 d2 h1 h2 Pt
Camera
Upper Middle Lower
Fixed/2D sensor 3 4 4
Head 3 5 1
Component Size Definition Drawing Recognition Shape
Recognition Option
Mounting Position Offset
Controlling 3D Sensor *
Edit Lead Pitch
Cut Lead - New Definition
Cut Lead Info. Generation
Specify Special NC Lead
Allocate Lead
Asymmetric Lead
Add Primitive, Lead Gr
Resize Processing Window
No Orientation Estimation
No Center Position Estimation
Orientation Estimation, Lead
Adjust Lead Detecting Point
Lead Detecting Window Width
Display Estimated Result
Image Reverse Flag
Clipping Level, 2D sensor *
Clipping Level, 3D sensor *
Checking Component Pickup
Tolerance for Component Dimension
Tolerance for Lead Pitch
Tolerance for Lead Coplanarity *
Tolerance for Orientation
Tolerance for Center Position
Detail Dimension Check
Nozzle Position Checking
Dense Mounting
Lighting Check
Lead Interpolation
Specify Lead Detecting Point *
=提示=
有∗记号的可选项不能用于 BM122/123。
通过反射照明识别电极的反射光。
只对一边至少有四根导线的元件有效。
求出各边的中心,通过连接对边的中心求出倾斜。
从导线的顶端检测内侧。
识别中心为
1) 相反两个方向上有导线时,各个边中心的等分点。
2) 四个方向有导线时,在上下边中心线与左右边中心线的交点。

BM122/123/221/231
元件识别数据制作方法
3.4 反射 电极型、导线型
E35CCC-50-111-B0
3.4-6
BM122/123/221/231
元件识别数据制作方法
3.5 反射 球形排列型
E35CCC-50-181-B0
3.5-1
3.5. 反射 球形排列型
E35CCC-50-181-B0
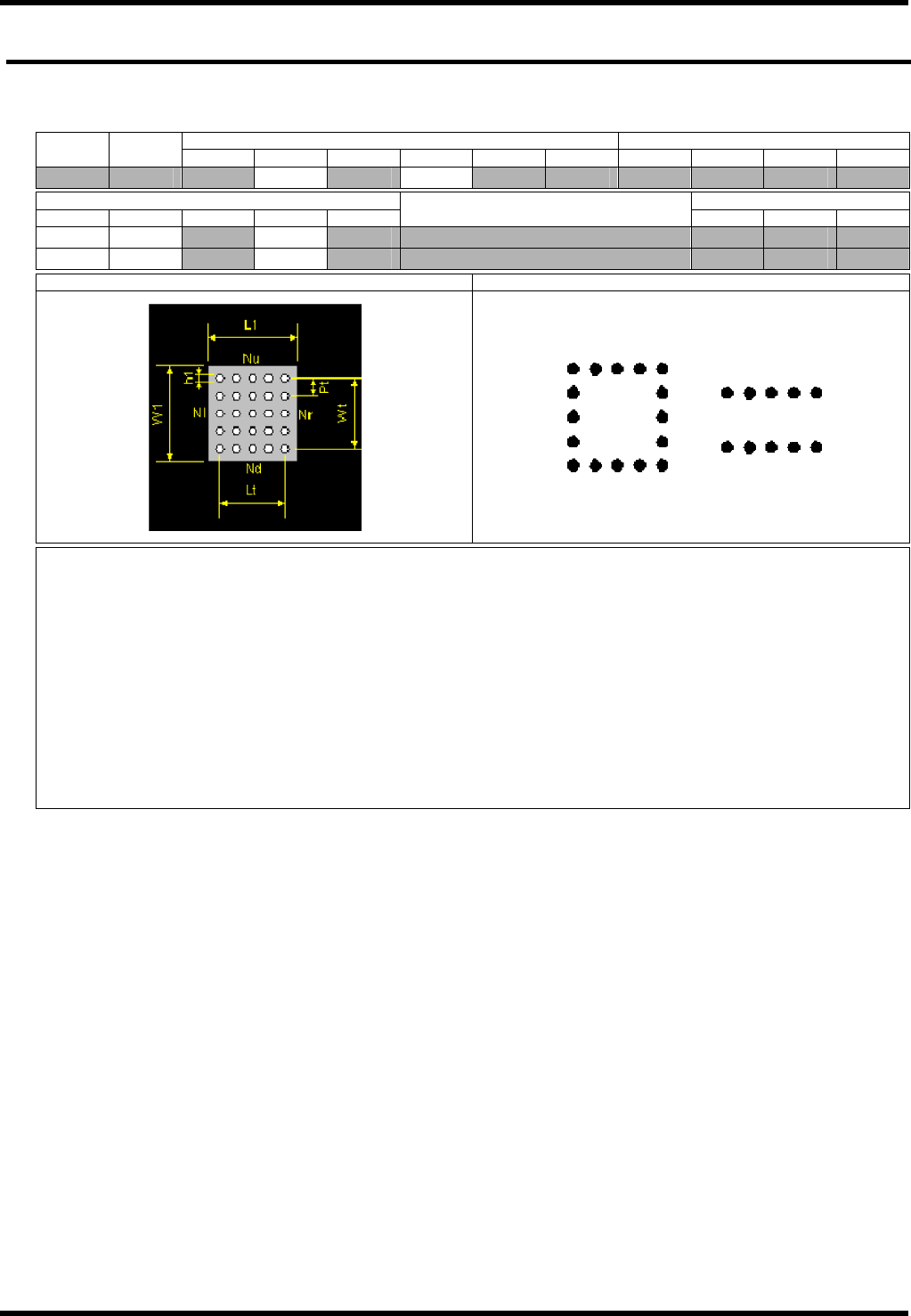
3.5.1 反射 球形排列型-通用
Body Dimension/External Dim [mm] Lead Count Parts
Class
Parts
Type
L1 L2 W1 W2 Lt Wt Nu Nd Nl Nr
105 0
Lead Size [mm] Lighting
d1 d2 h1 h2 Pt
Camera
Upper Middle Lower
Fixed/2D sensor 4 0 0
Head 3 0 0
Component Size Definition Drawing Recognition Shape
Recognition Option
Ball Existence Area
Mounting Position Offset
Controlling 3D Sensor *
Edit Lead Pitch
Cut Lead - New Definition
Cut Lead Info. Generation
BGA Ball Array
Ball Non-existence Area
Resize Processing Window
No Orientation Estimation
No Center Position Estimation
Display Estimated Result
Image Reverse Flag
Clipping Level, 2D sensor *
Clipping Level, 3D sensor *
Checking Component Pickup
Tolerance for Lead Pitch
Tolerance for Lead Coplanarity *
Tolerance for Orientation
Tolerance for Center Position
Nozzle Position Checking
Dense Mounting
Lighting Check
Lead Interpolation
Fix Ball Detecting Position *
Specify no Examination Area
Ball Existence Area
=提示=
有∗记号的可选项不能用于 BM122/123。
通过反射照明识别电极的反射光。
只识别导线外形上球形的排列,并不能识别各个球形。
只在上下边、左右边或上下左右边上有三个以上球形时有效。
如果一边有三个以上的球形欠缺,则不能用此边及其对边进行定位。
(请将此边及其对边的导线数设定为 0)
在角上有导线时,导线的根数两边都计算。
在判定有无全球形时,请指定‘全球形识别’可选项。
根据球形配列、元件颜色等有时不能进行全球形识别。
2D 识别状态要求球形在方格上,而且需要球形周围为均匀黑色,如果仍然无法识别请与本公司联系。
当头摄像机被选择时:
BGA 全球形识别是可以被选择,但是当上段或者下段的照明点灯时,则会使功能不能充分发挥。