NM-MF11ABM221.pdf - 第56页
BM122/123/221/231 元件识别数据制作方法 3.5 反射 球 形排列型 E35CCC-50- 181-B0 3.5-1 3.5. 反射 球形排列型 E35CCC-50-181-B0 3.5.1 反射 球 形排列型-通用 Body Dimension/ Exter nal D im [ mm] Lead C ount Parts Class Parts Ty pe L1 L2 W1 W 2 Lt W t Nu Nd Nl N…

BM122/123/221/231
元件识别数据制作方法
3.4 反射 电极型、导线型
E35CCC-50-111-B0
3.4-6
BM122/123/221/231
元件识别数据制作方法
3.5 反射 球形排列型
E35CCC-50-181-B0
3.5-1
3.5. 反射 球形排列型
E35CCC-50-181-B0
3.5.1 反射 球形排列型-通用
Body Dimension/External Dim [mm] Lead Count Parts
Class
Parts
Type
L1 L2 W1 W2 Lt Wt Nu Nd Nl Nr
105 0
Lead Size [mm] Lighting
d1 d2 h1 h2 Pt
Camera
Upper Middle Lower
Fixed/2D sensor 4 0 0
Head 3 0 0
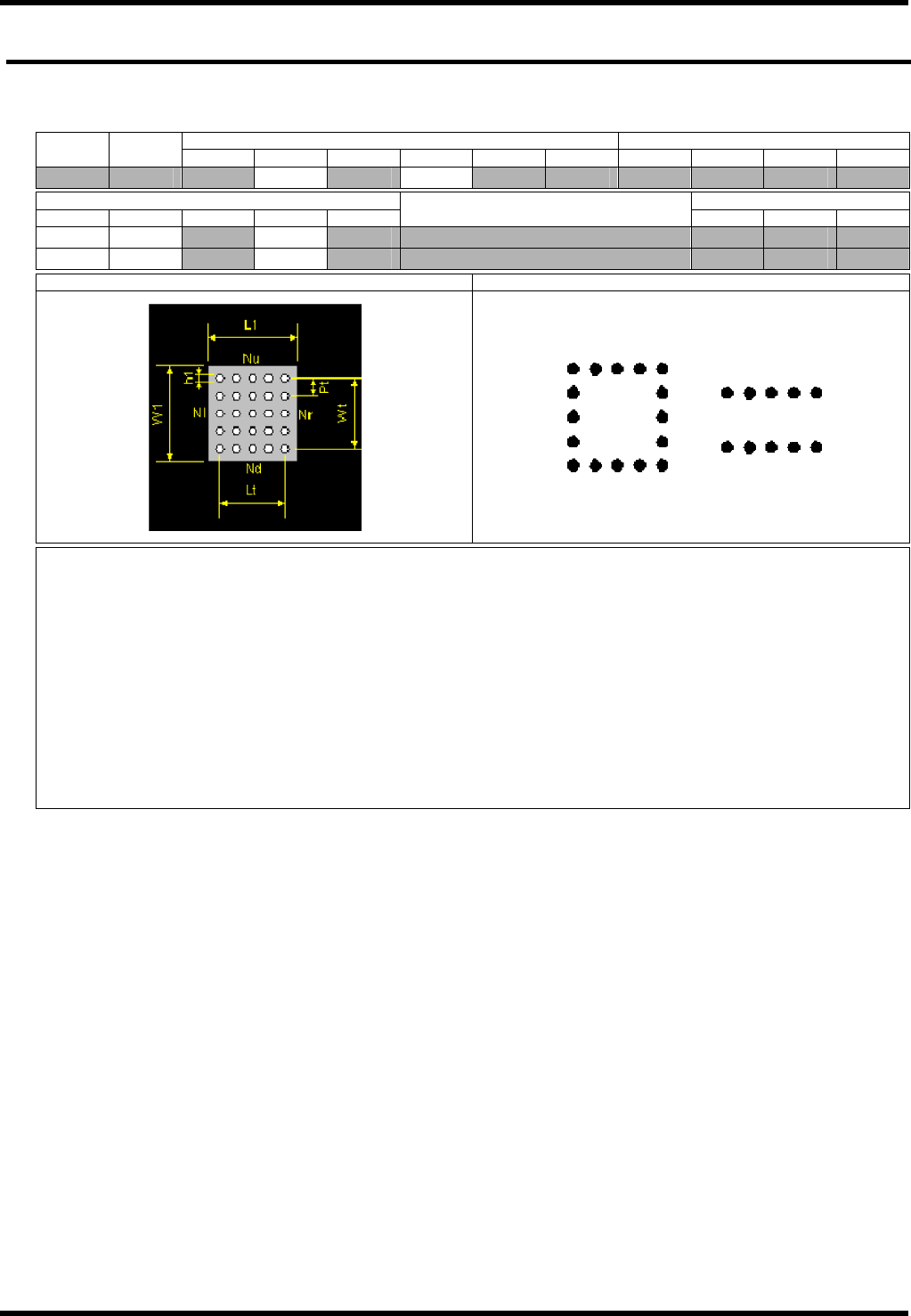
Component Size Definition Drawing Recognition Shape
Recognition Option
Ball Existence Area
Mounting Position Offset
Controlling 3D Sensor *
Edit Lead Pitch
Cut Lead - New Definition
Cut Lead Info. Generation
BGA Ball Array
Ball Non-existence Area
Resize Processing Window
No Orientation Estimation
No Center Position Estimation
Display Estimated Result
Image Reverse Flag
Clipping Level, 2D sensor *
Clipping Level, 3D sensor *
Checking Component Pickup
Tolerance for Lead Pitch
Tolerance for Lead Coplanarity *
Tolerance for Orientation
Tolerance for Center Position
Nozzle Position Checking
Dense Mounting
Lighting Check
Lead Interpolation
Fix Ball Detecting Position *
Specify no Examination Area
Ball Existence Area
=提示=
有∗记号的可选项不能用于 BM122/123。
通过反射照明识别电极的反射光。
只识别导线外形上球形的排列,并不能识别各个球形。
只在上下边、左右边或上下左右边上有三个以上球形时有效。
如果一边有三个以上的球形欠缺,则不能用此边及其对边进行定位。
(请将此边及其对边的导线数设定为 0)
在角上有导线时,导线的根数两边都计算。
在判定有无全球形时,请指定‘全球形识别’可选项。
根据球形配列、元件颜色等有时不能进行全球形识别。
2D 识别状态要求球形在方格上,而且需要球形周围为均匀黑色,如果仍然无法识别请与本公司联系。
当头摄像机被选择时:
BGA 全球形识别是可以被选择,但是当上段或者下段的照明点灯时,则会使功能不能充分发挥。
BM122/123/221/231
元件识别数据制作方法
3.5 反射 球形排列型
E35CCC-50-181-B0
3.5-2
3.5.2 反射 球形排列型-黑 BGA
Body Dimension/External Dim [mm] Lead Count Parts
Class
Parts
Type
L1 L2 W1 W2 Lt Wt Nu Nd Nl Nr
105 1
Lead Size [mm] Lighting
d1 d2 h1 h2 Pt
Camera
Upper Middle Lower
Fixed/2D sensor 4 0 0
Head 3 0 0
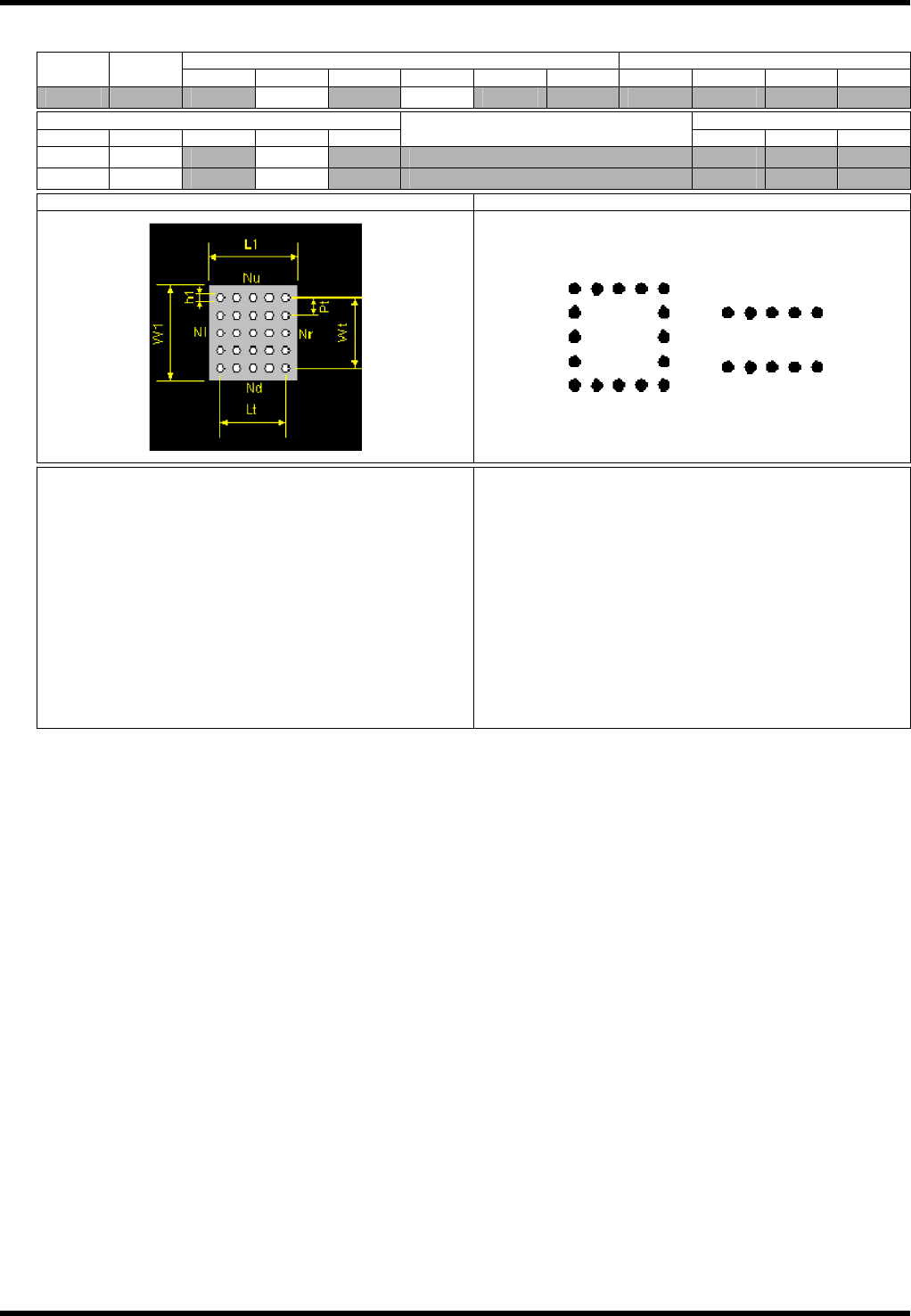
Component Size Definition Drawing Recognition Shape
Recognition Option
Ball Existence Area
Mounting Position Offset
Controlling 3D Sensor *
Edit Lead Pitch
Cut Lead – New Definition
Cut Lead Info. Generation
BGA Ball Array
Ball Non-existence Area
Resize Processing Window
No Orientation Estimation
No Center Position Estimation
Display Estimated Result
Image Reverse Flag
Clipping Level, 2D sensor *
Clipping Level, 3D sensor *
Checking Component Pickup
Tolerance for Lead Pitch
Tolerance for Lead Coplanarity *
Tolerance for Orientation
Tolerance for Center Position
Nozzle Position Checking
Dense Mounting
Lighting check
Lead Interpolation
Fix Ball Detecting Position *
Specify no Examination Area
Ball Existence Area
=提示=
有∗记号的可选项不能用于 BM122/123。
通过反射照明识别电极的反射光。
只在球形上下边、左右边或者左右上下边有三个以上球形,且元件本体为暗颜色时才有效。
如果一边连续有三个以上的球形欠缺,则此边及其对边不能用于定位。
(请将此边及其对边的导线数设定为 0)
在角上有导线时,导线的根数两边都计算。
在判定有无全球形时,请指定‘全球形识别’可选项。
根据球形配列、元件颜色等有时不能进行全球形识别。
2D 识别状态要求球形在方格上,而且需要球形周围为均匀黑色,如果仍然无法识别请与本公司联系。