FX-1R-FX-1动作说明书.pdf - 第13页
Rev 2.00 动作说明书 2-6 2-4-1 . Z 轴 Z 轴 移动量设定为 6mm / r ( 飞轮比 1 : 1 ) Z 马达变换器设定为 8,192 P / r 电子齿轮 分子设定为 80H ( 128 ) ,分母设定为 4BH(75) 之后, 平均 1 脉冲的移动量为 ( 6×128 )/( 8,192×75 )= 0.00125mm / pulse 。 ( 用马达端部附属的旋转型变换器控制半闭合 ) 2-4-2 .θ轴 …
Rev 2.00
动作说明书
2-5
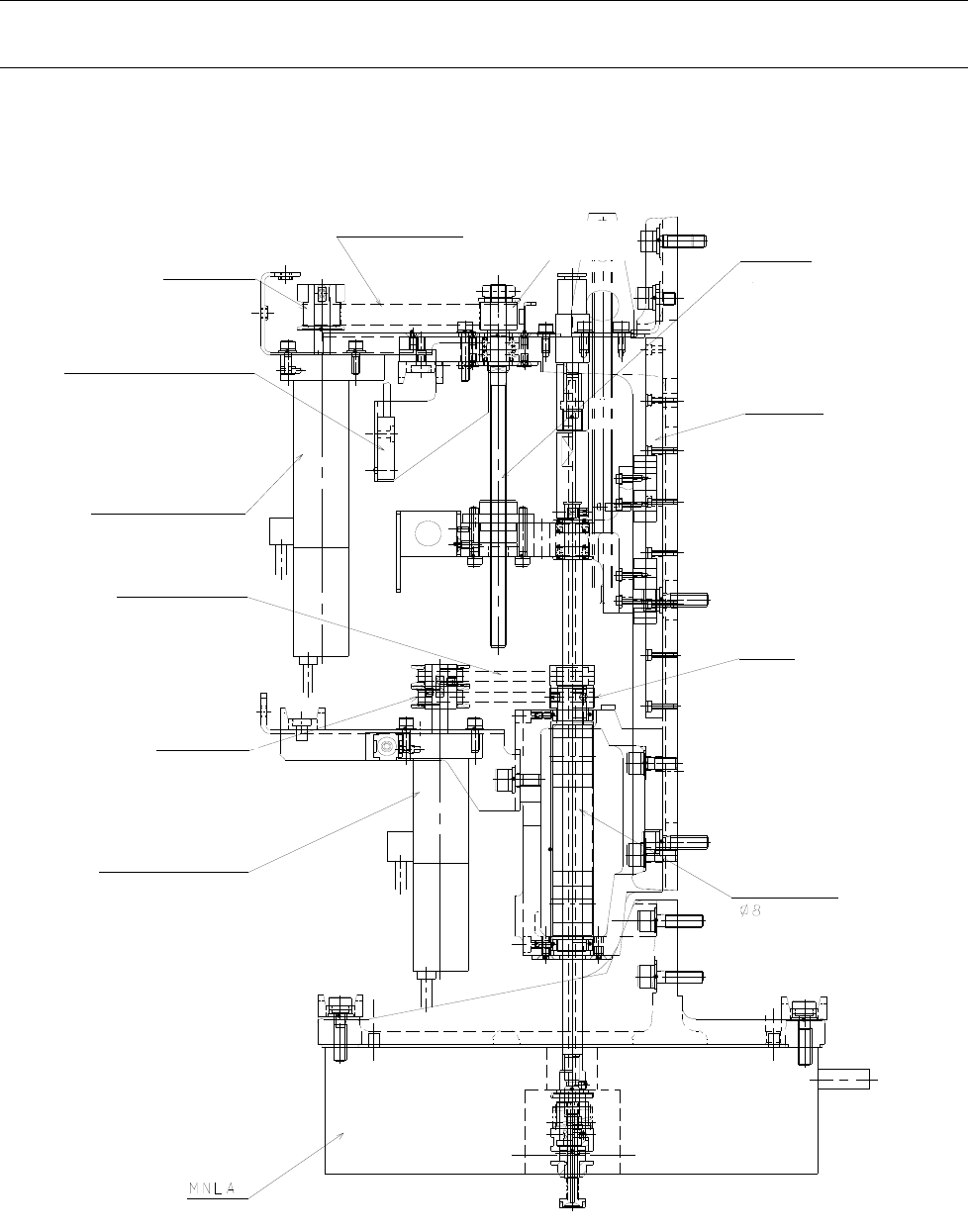
2-4.Z、θ轴
MNLA 贴装头
Z马达向CW方向转动,Z轴向+方向移动 0.00125mm/pls
Z马达皮带轮
30齿
同步皮带Z
1.5GT-121齿 球螺丝
Φ6X引脚6
Z皮带轮
30齿
直线导向器
轨道宽度8
Θ 皮带轮
36齿
球弹簧
θ马达向CW方向转动,θ轴+方向转动
0.045°/pls
Θ马达10W
2000ppr 4倍
36齿
θ马达皮带轮
1.5GT-104齿
同步皮带θ
1200ppr 4倍
Z马达 30W
Z原点传感器
Z轴在XY移动高度时ON
图 2-4

Rev 2.00
动作说明书
2-6
2-4-1.Z轴
Z 轴 移动量设定为 6mm/r (飞轮比 1:1 )
Z马达变换器设定为
8,192 P/r
电子齿轮 分子设定为 80H (128),分母设定为 4BH(75)之后,
平均 1 脉冲的移动量为(6×128)/(8,192×75)= 0.00125mm/pulse。
( 用马达端部附属的旋转型变换器控制半闭合 )
2-4-2.θ轴
θ马达变换器设定为 8,192P/r
电子齿轮 分子设定为 400H (1,024),分母设定为 708H (1,800)之后,
平均 1 脉冲的移动量为(360×1,024)/(8,192×1,800)= 0.025deg/pulse。
( 用马达端部附属的旋转型变换器控制半闭合 )
Rev 2.00
动作说明书
3-1
3.关于功能
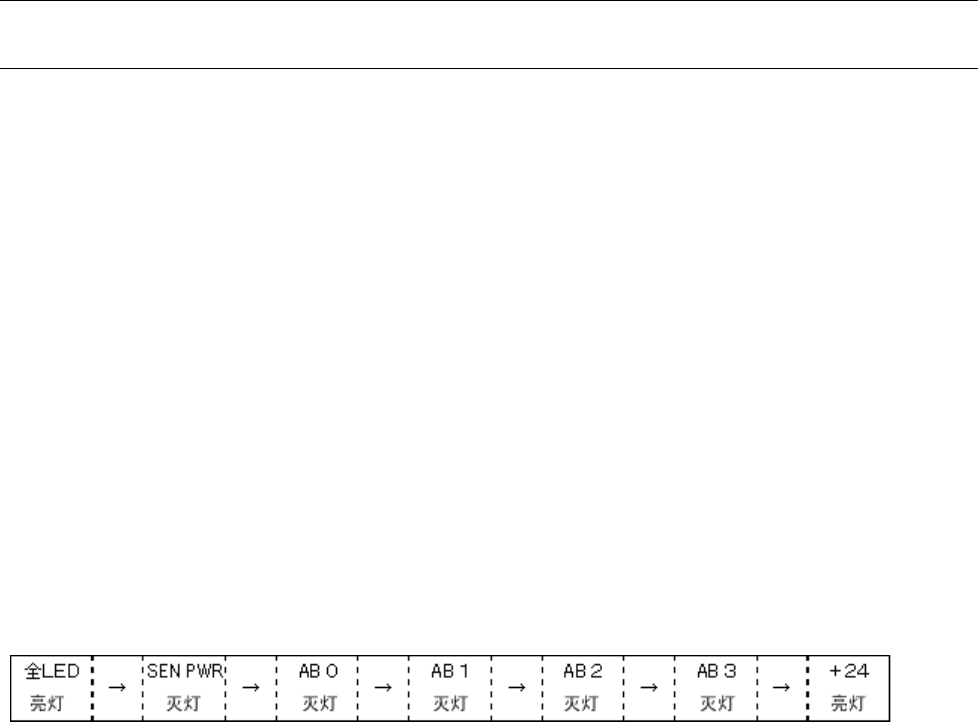
3-1.起动时的各部LED显示
在没有警报等的正常状态下,起动时(电源开关 ON 时),各部 LED 的显示如下。
3-1-1.控制装置
3-1-1-1.CPU 电路板
PW :
绿色的 LED 亮等
3-1-1-2.位置板
板 1 1CH、2CH : 绿色的 LED 亮灯
板 2 1 ~ 4CH : 绿色的 LED 亮灯
3-1-1-3.MCM 电路板
3-1-1-4.IP-X3 电路板
RUN : 绿色的 LED 亮灯
3-1-1-5.I/O 控制电路板
RUN : 绿色的 LED 亮灯
3-1-1-6.BASE FEEDER 电路板
RUN : 绿色的 LED 亮灯
3-1-1-7.SAFETY 电路板
所有均灭灯 (护罩开放时,检测供料器站立时绿色的 LED 亮灯)