FX-1R-FX-1动作说明书.pdf - 第85页
Rev.2 . 0 0 动作说明书 5-3 CPU Mobile Celeron (400MHz) ※ Mobile Pentium Ⅲ (400MHz ~ 700MHz) 可以贴装 L2 Cache 128KByte on-die (Mobile Celeron) ※ Mobile Pentium Ⅲ 的时候为 256KByte Chipset 400MX PCI Set Memory 最大 256Mbyte ※ DIMM 插座 X1…
Rev.2 . 0 0
动作说明书
5-2
5-1. 各基板的功能
5-1-1.CPU基板
本基板的人机 I/F 部和机器控制部,均需要主控制器,其功能可以认为是一张化的电脑。和其他基板的
I/F 用 CPCI 接口或 CPCI 插口→接口桥基板→VME 接口连接。
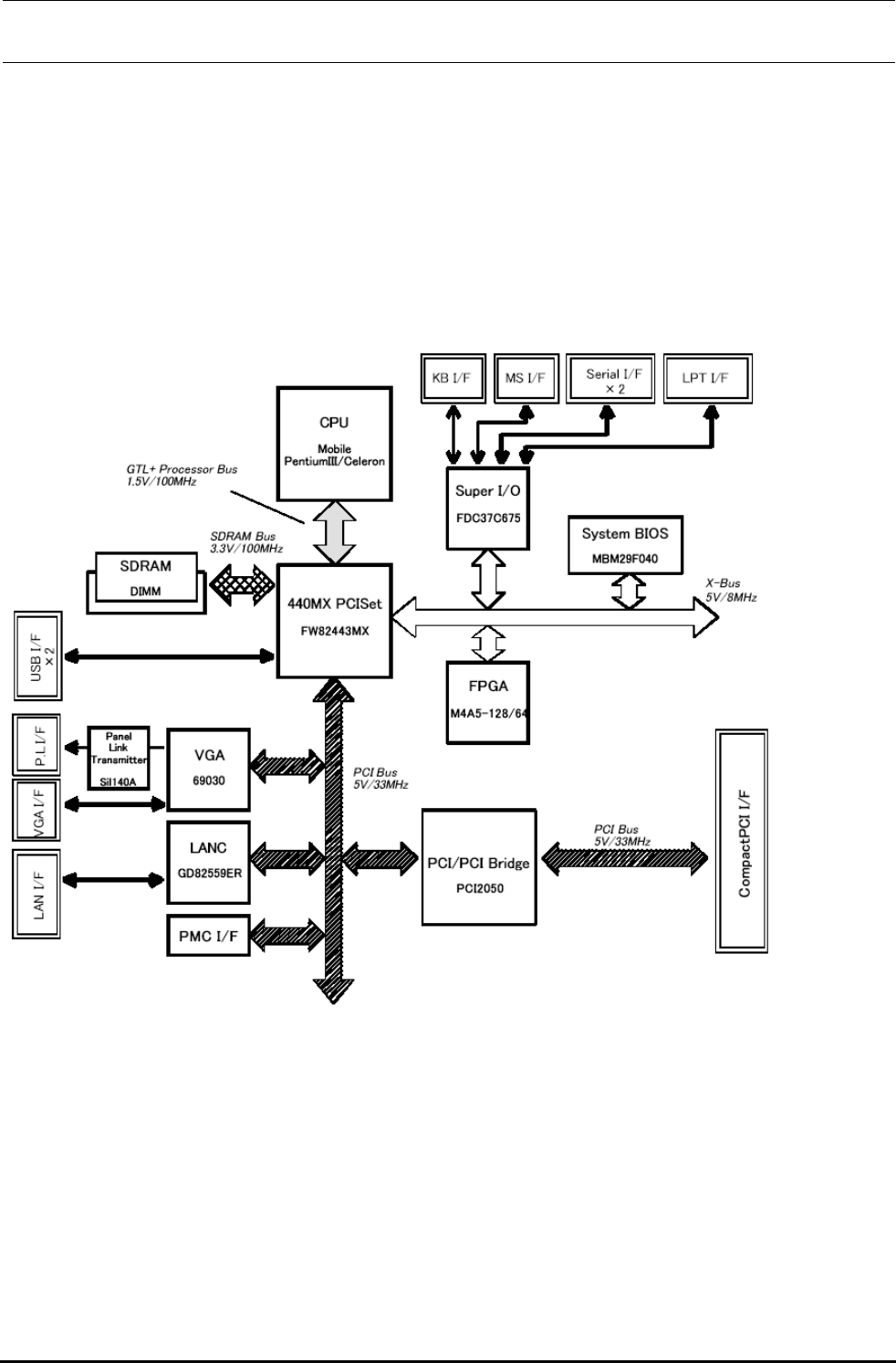
CPU 基板功能图如图5-1-1或主要规格表5-1-1。
图5-1-1 CPU 基板的功能方块图
Rev.2 . 0 0
动作说明书
5-3
CPU Mobile Celeron (400MHz)
※Mobile PentiumⅢ(400MHz~700MHz)可以贴装
L2 Cache 128KByte on-die (Mobile Celeron)
※Mobile PentiumⅢ的时候为 256KByte
Chipset 400MX PCI Set
Memory
最大 256Mbyte
※DIMM 插座 X1 (100MHz SDRAM)
PCI to PCI Bridge PCI2050 (T.I)
System ROM Flash EEPROM 512Kbyte
System BIOS GENERAL SOFTWARE Embedded BIOS
主功能
Watchdog Timer
禁止 44,87,175,350mS 从中可以选择
※禁止默认值
Ethernet
使用 GD82559ER(Intel 公司)
10Base-T/100Base-TX
VGA B69030(Intel), Sil140A(Silicon Image)
Analog VGA x 1ch, Panel Link(DVD-D) X 1ch
IDE
Enhanced IDE X 1ch, 2.5”HDD 用
从前操作盘输出(带防止脱落功能)
FDD
从前操作盘输出(带插销)
Serial
RS-232C X 2ch (D-Sub9 引脚插头)
Parallel IEEE1284 X 1ch
Keyboard
PS/2 规格 X 1ch
Mouse
PS/2 规格 X 1ch
USB 2ch
接口
PMC 32bit 5V, 1Slot
物理形状 CompactPCI 6Ux8HP 双插孔
(233.35mm x 160.00mm)
CompactPCI 母线规格 32bit/33MHz/5V (PICMIG2.0 Rev 2.1 标准)
CimpactPCI 功能
Hot Swap
对应 ENUM#信号监视(情况和发生突入)
可以分别相各插口供给
※但是,本板本身的 Hot Swap 不行
使用环境 温度∶0~50℃
湿度∶35~85%(应无结露)
动作环境
电源 +5V±5% (Max 3A)
+3.3V±5% (Max 3A)
※1 ULP…Ultra Low Power
表5-1-1 CPU 基板的主要规格

Rev.2 . 0 0
动作说明书
5-4
5-1-2.位置板
位置板是经由三菱电机公司生产的控制通信网络 SSCNETⅡ控制伺服马达和步进马达的 CPCI 母线的接口
板。最多可以控制 12/24 轴的马达。
① 从CPU基板软件接受指令,控制
XYZθ伺服马达和传送部脉冲马达。
② 检测各轴的原点传感器和限制传感器。
③ 检测伺服驱动器的异常和检测磁标尺的异常。
④ 检测紧急停止开关,让 XY 轴、Zθ轴、传送轴停止。
5-1-3.母线桥基板
母线桥基板与 Co
mpactPCI(以下称 CPCI)接口和VME接口连接,是从 CPCI 向 VME 存取的基板。
两个接口连接的基板如下所示。
CPCI 接口的基板 : CPU 基板、位置接口基板
VME 接口的基板 : SAFETY 基板、LIGHTCTRL 基板、BASE-FEEDER 基板、I/O CTRL 基板、
IP-X3 基板、MCM(L)基板、MCM(R)基板
母线桥基板的功能
① “SCON”的绿色 LED
母线桥基板被设定到 VME 接口的系统控制器时亮灯。本机打开电源时时常亮灯。
② “REST SW”的按键
复位此基板。
5-1-4.MCM基板
本基板是元件中心用传感器(MNLA)的控制和演算基板。
主控 CPU 的 I/F,经 VME 接口→接口桥基板→CPCI 接口经路来进行。传感器的连接,包括电源的同轴
电缆 1 根进行专用串行通信。然后,位进行元件位置测定的 θ 马达变换器信号由 Zθ 驱动器供给。