FX-1R-FX-1动作说明书.pdf - 第49页
Rev.2 . 0 0 动作说明书 3-36 步进移动时的动作 步进移动时的速度、加速度由下法决定。 同时,步进移动时的速度、加速度不取决于罩子开、罩子关。 驱动行程 (mm) 0.125 速度 (kpps) 150.0 对高速比 (%) 25.0 加速度 (kpps 2 ) 15000.0 对高速比 (%) 25.0 驱动时间 (ms) 5.2 高速步进 驱动方式 三角驱动 驱动行程 (mm) 0.00125 速度 (kpps) 60…
Rev.2 . 0 0
动作说明书
3-35
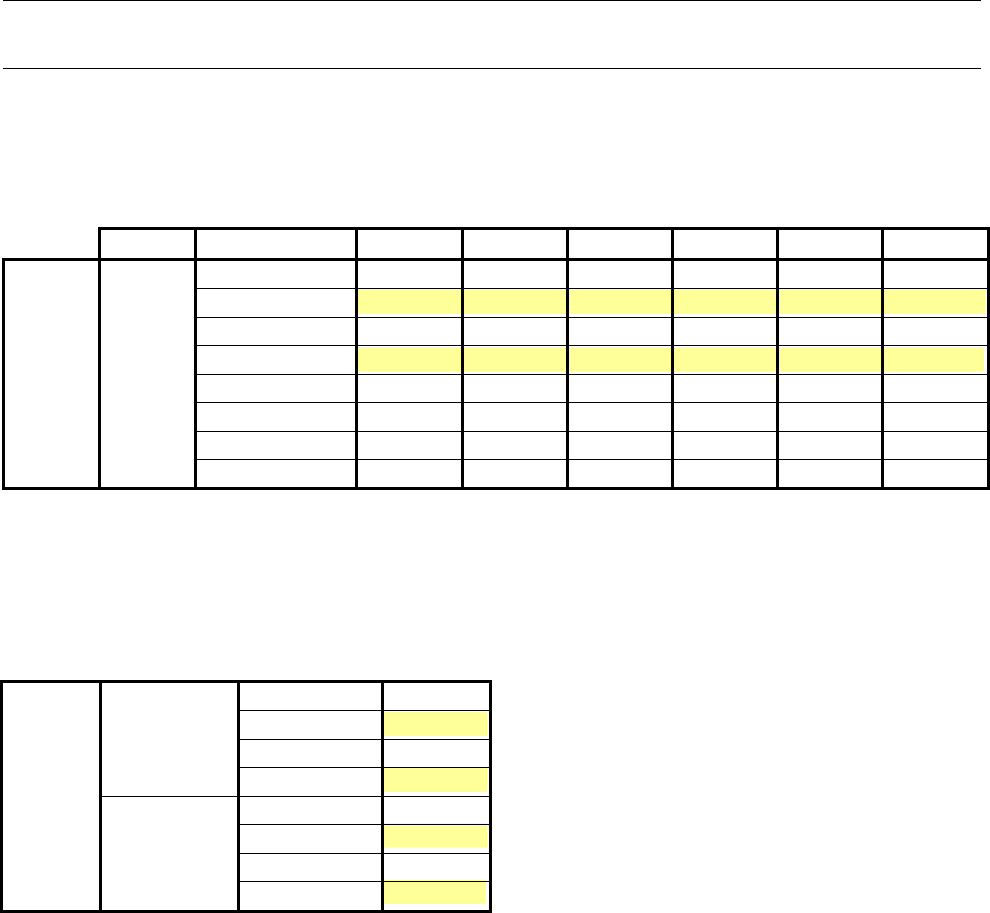
3-6-3-6. 待机下降时的 Z 轴动作
待机下降动作(T 行程)
待机下降速度、加速度在最大速度、最大加速度的范围内由下法决定。
速度区分 高速 2 高速 中速 低速 超低速 护盖开放
输入速度(kpps)
720.0
- - - -
600.0
对高速比(%)
120.0
- - - -
100.0
加速度(kpps
2
)
72000.0
- - - -
3000.0
对高速比(%)
120.0
- - - -
5.0
驱动时间(ms)
22.3
- - - -
108.8
驱动方式 台形驱动
- - - - 三角驱动
最高速度(kpps)
720.0
- - - -
163.2
机种
〔1〕
FX-1
元件高度
6 mm
MNLA
T
11.1
1 段移动
对高速比(%)
120.0
- - - -
27.2
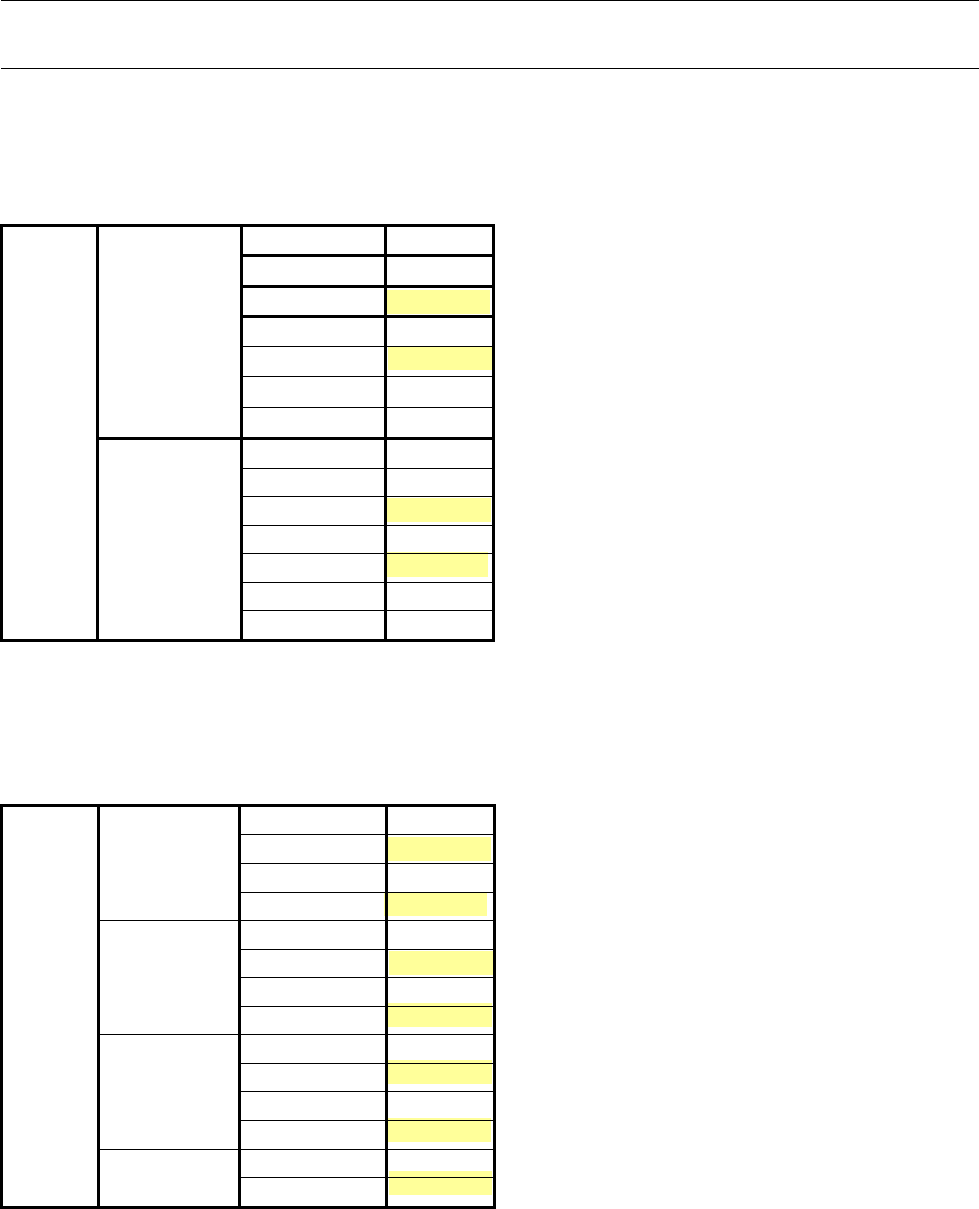
3-6-3-7. 其他的 Z 轴动作
原点复位时的动作
原点复位时的速度、加速度由下法决定。
同时,原点复位时的速度、加速度不取决于罩子开、罩子关。
速度(kpps)
10.0
对高速比(%)
1.7
加速度(kpps
2
)
200.0
传感器探索时
对高速比(%)
0.3
速度(kpps)
2.0
对高速比(%)
0.3
加速度(kpps
2
)
40.0
机种
〔1〕
FX-1
元件高度
6 mm
MNLA
俘获标志时
对高速比(%)
0.1
Rev.2 . 0 0
动作说明书
3-36
步进移动时的动作
步进移动时的速度、加速度由下法决定。
同时,步进移动时的速度、加速度不取决于罩子开、罩子关。
驱动行程(mm)
0.125
速度(kpps)
150.0
对高速比(%)
25.0
加速度(kpps
2
)
15000.0
对高速比(%)
25.0
驱动时间(ms)
5.2
高速步进
驱动方式 三角驱动
驱动行程(mm)
0.00125
速度(kpps)
60.0
对高速比(%)
10.0
加速度(kpps
2
)
6000.0
对高速比(%)
10.0
驱动时间(ms)
0.8
机种
〔1〕
FX-1
元件高度
6 mm
MNLA
微动步进
驱动方式 三角驱动
上述之外的其他动作
除了上述原点复位、步进移动之外的 Z 轴移动,其概要如下。
中速、低速、罩子开移动的速度和加速度均分别相当于高速的 50%、25%、10%。
速度(kpps)
600.0
对高速比(%)
100.0
加速度(kpps
2
)
60000.0
高速
对高速比(%)
100.0
速度(kpps)
300.0
对高速比(%)
50.0
加速度(kpps
2
)
30000.0
中速
对高速比(%)
50.0
速度(kpps)
150.0
对高速比(%)
25.0
加速度(kpps
2
)
15000.0
低速
对高速比(%)
25.0
速度(kpps)
60.0
机种
〔1〕
FX-1
元件高度
6 mm
MNLA
护盖开放
对高速比(%)
10.0

Rev.2 . 0 0
动作说明书
3-37
3-6-4.θ轴驱动速度·加速度·驱动时间
3-6-4-1 θ轴速度方式
θ轴按照下图的三角或台形驱动动作。
θ轴的最高速度和最高加速度如下。
贴装头
MNLA
θ轴最高速度(koos)
112
θ轴最高加速度(kpps2)
6670
减速比
1
θ轴变换器(pls)
2000
倍率
4
分辨率(deg/pls)
0.045
转动角: θ
最高角速度:ωmax-
角加速度:β 时
Speed
Time
β
β
0 T1 T
ω
θ
<
β
ω
max
2
When the conditions shown to the
left are satisfied, the triangle drive is
made.
θ
-axis movement time calculation formula
In case of triangle drive
T
= 2
β
θ
时为三角驱动
速度
时间
Θ轴移动时间的计算式
三角驱动时
β
β
0 T1
T2
T
ωmax
Speed
Time
θ
-axis movement time calculation formula
In case of trapezoidal drive
T
=
+
β
ω
max
θ
≥
β
ω
max
2
When the conditions shown to the
left are satisfied, the trapezoidal drive
is made.
ω
max
θ
时为台形驱动
速度
时间
Θ轴移动时间的计算式
台形驱动时
转动角小或角加速度小时峰值角都有可能达不到最高速度。
此时的速度方式为图的三角驱动。
Speed
Time
β
ω
ω
β
0
T
ωmax
时间
速度
3-6-4-2 θ轴驱动速度、加速度、驱动时间
θ轴的速度、加速度分为测定激光时和测定激光外时,有高速/中速/低速。