FX-1R-FX-1动作说明书.pdf - 第27页
Rev 2.00 动作说明书 3-14 3-3-2 .支撑台 支撑台、机械行程以及有效行程 基板上面高さ 0. 5m m 5mm 有効ストローク 52. 5m m MS パラメータ入力 2 mm 7mm 40m m ( 最大 ) 最大基板下制限 メカストローク 59m m ④原点高さ位置 B ( 原点センサ ON 方向 ) A ( 原点セン サ OFF 方向 ) エンコーダ零相検出 ③ソフト下方向リミット位 置 ①メカ下方向リミット位置…
Rev 2.00
动作说明书
3-13
3-3-1.CENTER马达
传送方向在左→右的方向时,马达转动方向为 CCW。
速度分布图以三角驱动(台形驱动)来进行的。
速度分为高速 400mm/s,中速 300 mm/s,低速仅在预备传送以及再次钳夹动作时使用。
1 指令单位为 1μm,各速度分类值如下表所示。
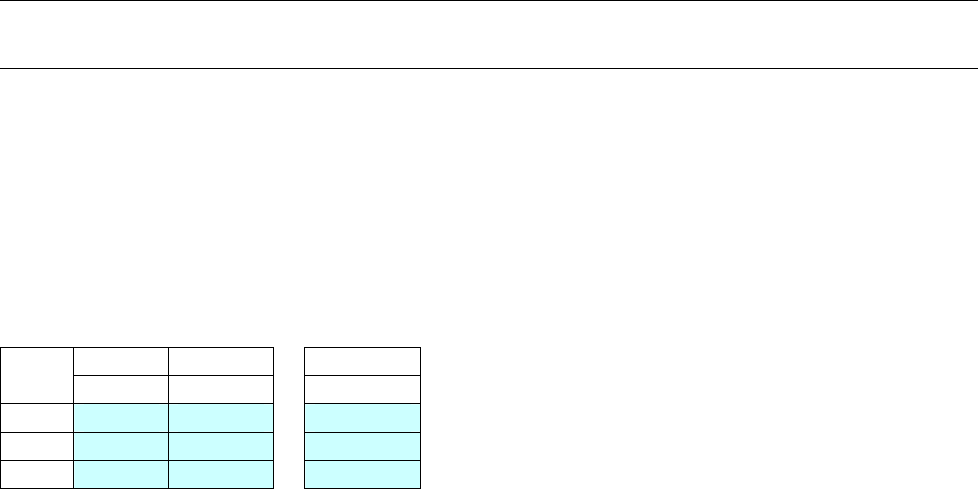
速度 加速度 加速时间
(mm/s) (mm/s2) (ms)
高速 400.0 1008.0
397.0
中速 300.0 1008.0 298.0
低速 56.0 1008.0 55.6
Rev 2.00
动作说明书
3-14
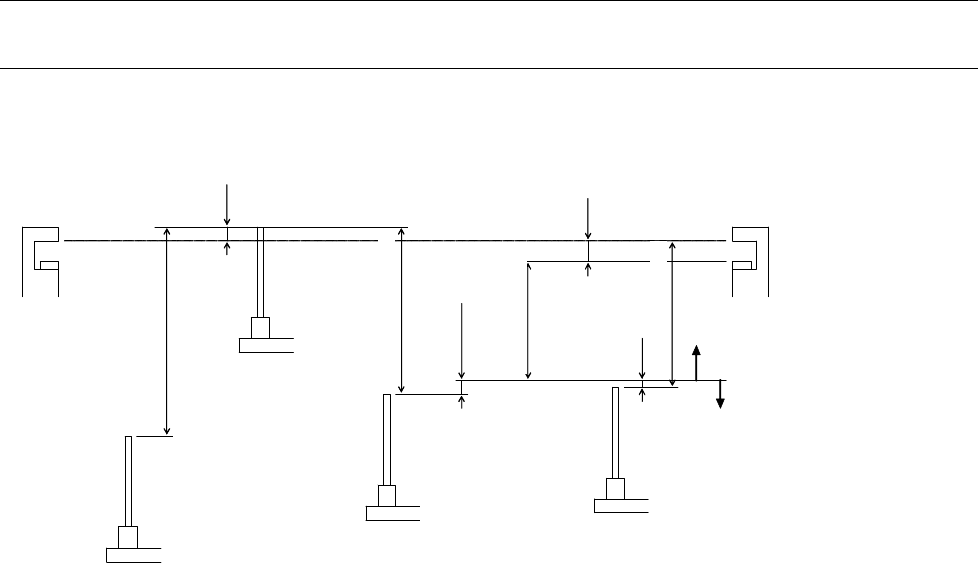
3-3-2.支撑台
支撑台、机械行程以及有效行程
基板上面高さ
0.5mm
5mm
有効ストローク 52.5mm
MS パラメータ入力
2 mm
7mm
40mm(最大)
最大基板下制限
メカストローク 59mm
④原点高さ位置
B(原点センサ ON 方向)
A(原点センサ OFF 方向)
エンコーダ零相検出
③ソフト下方向リミット位置
①メカ下方向リミット位置
②メカ上方向リミット位置
基板上面高度
机械上方向限制位置
机械下方向限制位置
软件下方向限制位置
变换器零相检测
原点高度位置
B(原点传感器ON方向)
A(原点传感器OFF方向)
机械行程59mm
有 效行 程 52 .5m m
输入MS参数
最大基板下限制
(最大)
①:下方向的机械界限高度
②:上方向的机械界限高度
③:是有效行程下限位置,基板送入、排出时的待机位置。
有效行程上限位置是从③的高度上升 52.5mm 的位置,与②高度相同。
有效行程∶生产中可以驱动的行程范围
(注)基板下限制可以在从 5mm 起 40mm 的范围,以1 mm 单位进行设定。
默认的基板下限制为 40 mm。
(注)③的有效行程下限高度,根据基板下限而变化。
因此,有效行程也按下式变化。
有效行程(mm) =基板下限(mm)+5+7+0.5
基板送入·送出时的待机高度也同样变化。
以有效行程上限为基准高度
待机高度(mm)=基板下限(mm)+5+7
Rev.2.00
動作説明書
3-15
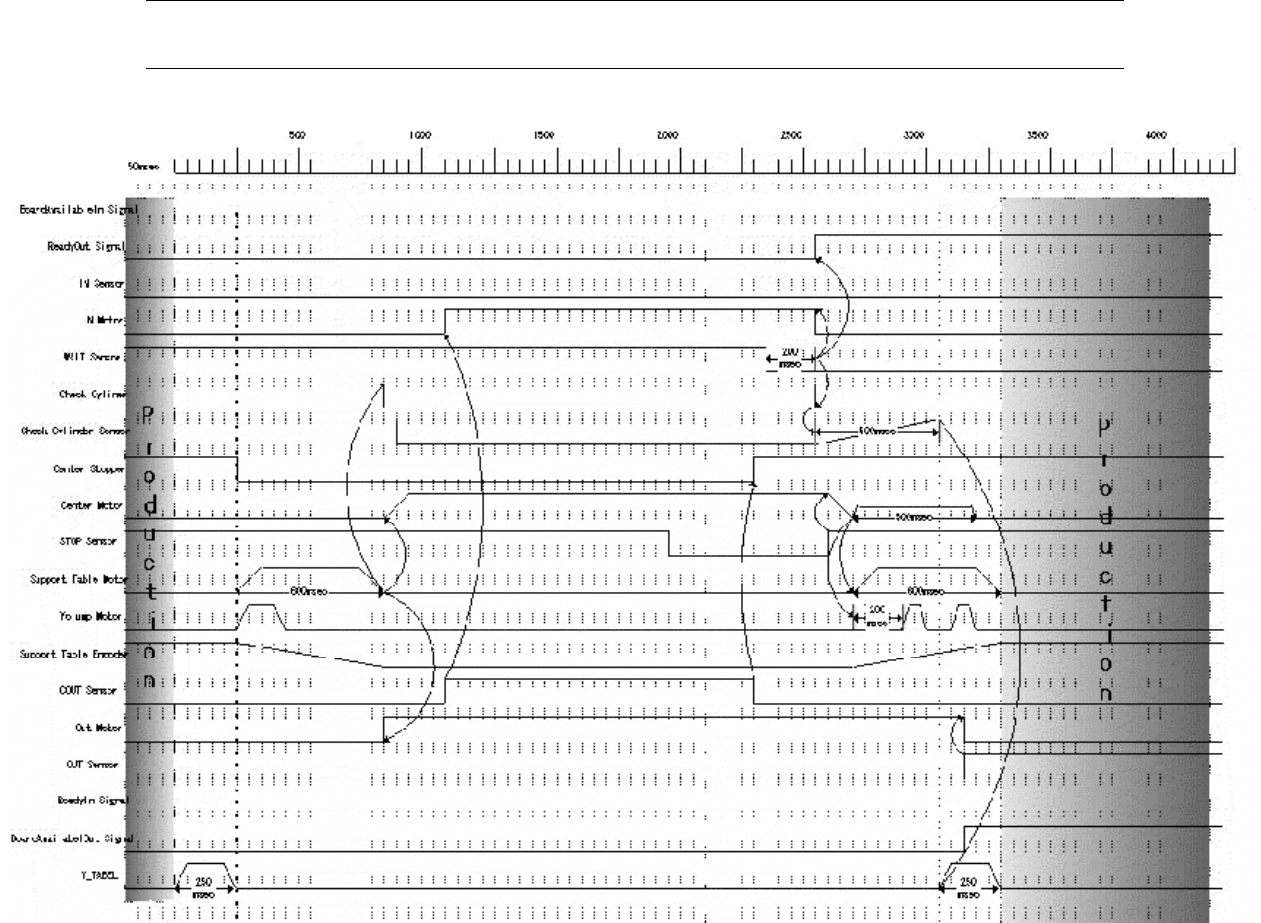
3-3-3.基板传送时间曲线图