FX-1R-FX-1动作说明书.pdf - 第9页
Rev 2.00 动作说明书 2-2 变换器断线的检测 ・ 线性变换器 ( 磁标尺 ) 发生断线后, 在 6 μs 以内用磁标尺监测器检测警报。 警报发生之后, 伺服驱动器 让动态制动器动作,制动马达。 ・ 旋转型变换器发生断线后,在约 3.5ms 后,用磁标尺监测器检测警报。警报发生之后,伺服驱动器 让动态制动器动作,制动马达。 控制异常的检测 当旋转型变换器和线性变换器 ( 磁标尺 ) 的位置偏差量在旋转型变换器的 1 圈以上时, …
Rev 2.00
动作说明书
2-1
2.XY、Z、θ轴的说明
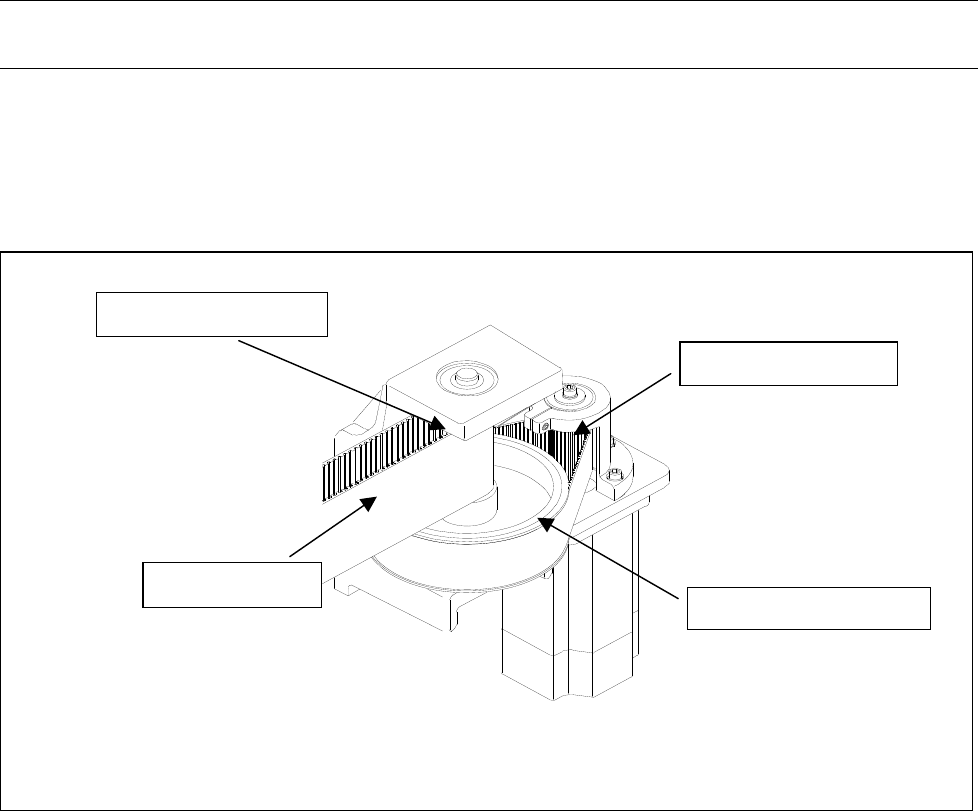
2-1.Y-大型轴(以下记载为YB轴)
・皮带轮 YM 和皮带轮 YA 的减速比 30:140
・皮带轮间距圆直径的比 33.42mm:133.69mm
平均马达 1 圈的移动量为
30/140×33.42mm×π=22.5mm
马达变换器(旋转型变换器)的分辨率为
131,072 pls(马达变换器分辨率)
因此,平均 1 脉冲的移动量为
22.5mm/131,072 pls=0.17μm/pls
线性标尺的分辨率为
5μm (FX-1) 2μm (FX-1R)
马达输出 750W 图 2-1
马达皮带轮 齿数 30
大减速皮带轮 齿数 140
小减速皮带轮 齿数 21
皮带间距 5mm

Rev 2.00
动作说明书
2-2
变换器断线的检测
・线性变换器(磁标尺)发生断线后,在 6μs以内用磁标尺监测器检测警报。警报发生之后,伺服驱动器
让动态制动器动作,制动马达。
・旋转型变换器发生断线后,在约 3.5ms 后,用磁标尺监测器检测警报。警报发生之后,伺服驱动器
让动态制动器动作,制动马达。
控制异常的检测
当旋转型变换器和线性变换器(磁标尺)的位置偏差量在旋转型变换器的 1 圈以上时,或两者的速度偏差
量在 400rpm 以上时,用伺服驱动器检测警报。警报发生之后,伺服驱动器让动态制动器动作,制动
马达。
Rev 2.00
动作说明书
2-3
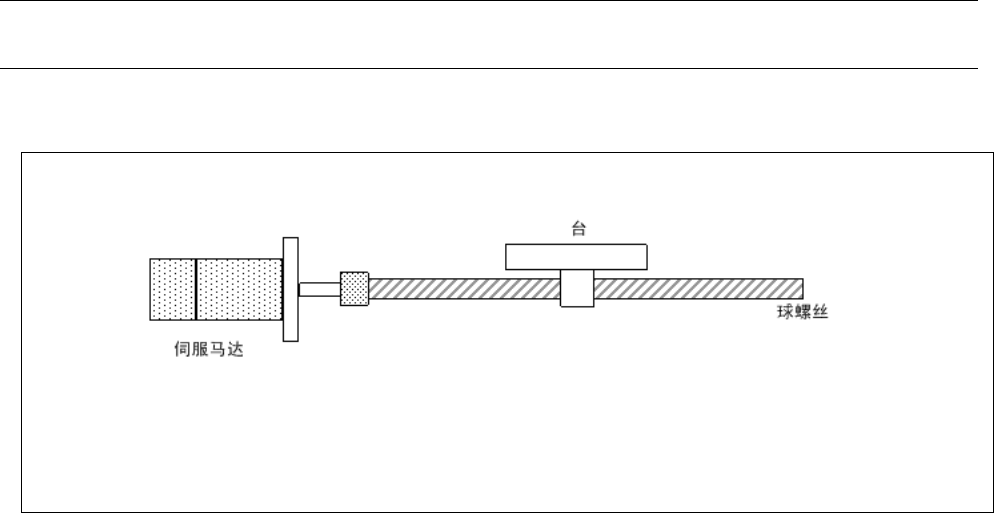
2-2.Y-TBL 轴 (以下记载为YA轴)
・球螺丝引线 FX-1: 20mm (马达平均 1 圈的移动量)
FX-1R: 30mm (马达平均 1 圈的移动量)
马达变换器(转动型变换器)的分辨率为
131,072 pls (马达变换器分辨率)
因此,平均 1 脉冲的移动量为
FX-1: 20mm/131,072 pls=0.15μm/pls
FX-1R: 30mm/131,072 pls=0.228μm/pls
(FX-1 是以电动机端部附属的旋转型编码器进行的半闭环控制)
(FX-1R 是利用线性标度的闭环控制)
变换器断线的检测
• 线性编码器(磁性膜)发生断线后,在 6μs 以内由磁性膜探测器检测出警报。一发生警报,伺服驱
动器即启动动态制动器,对电动机进行制动,使之停止。
• 旋转型变换器发生断线后,在约 3.5ms 后,用磁标尺监测器检测警报。警报发生之后,伺服驱动器
让动态制动器动作,制动马达。
马达输出 750W 图2-2