FX-1R-FX-1动作说明书.pdf - 第68页
Rev.2 . 0 0 动作说明书 3-55 ● 算法 3 这是第 1 最小宽度和第 2 最小宽度都用 ONCE 指令计算的组合。 因为没有角度关系,因此适用于不能通过扫描来计算最小宽度的元件。 アルゴリズム 3 第1最小巾 第2最小巾 α Holdoff Angle 0 = 0 -14 -14 0゚ ヘッド 角度 Holdoff Angle 1 = 90 90゚ 部品角度 ( LA 内 ) 90゚ 0゚ Angle Limit 0 =…
Rev.2 . 0 0
动作说明书
3-54
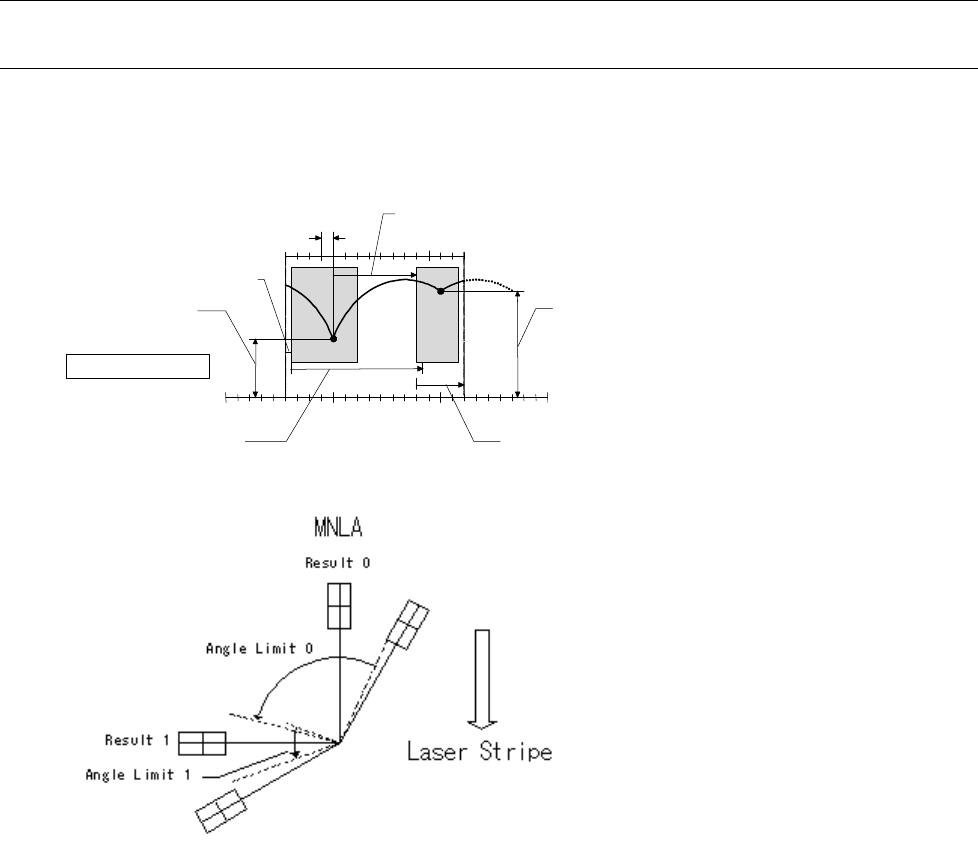
● 算法 2
这是同时扫描第 1 最小宽度和第 2 最小宽度来计算的组合。
象 SOP、QFP、QFJ 那样的用 LA 测定高度,引脚包含在影子里的元件使用。
アルゴリズム2
第1最小巾
第2最小巾
α
Holdoff Angle 0 = 5
Holdoff Angle 1 = 70
14 14
ヘッド角度
90゚
部品角度(LA内)
0゚
120゚-30゚
Angle Limit 0 = 100 Angle Limit 0 = 40
第1最小宽度 第2最小宽度
贴装头角度
元件角度(LA内)
算法2
图 算法 2
此组合,哪个最小宽度都是通过扫描来取得的,因此处理时间较长。另外,测定时旋转速度也不快。
(因为取样周期决定,如果用较快速度转动的话,取样数据不精确,有可能不能计算最小宽度。)
Rev.2 . 0 0
动作说明书
3-55
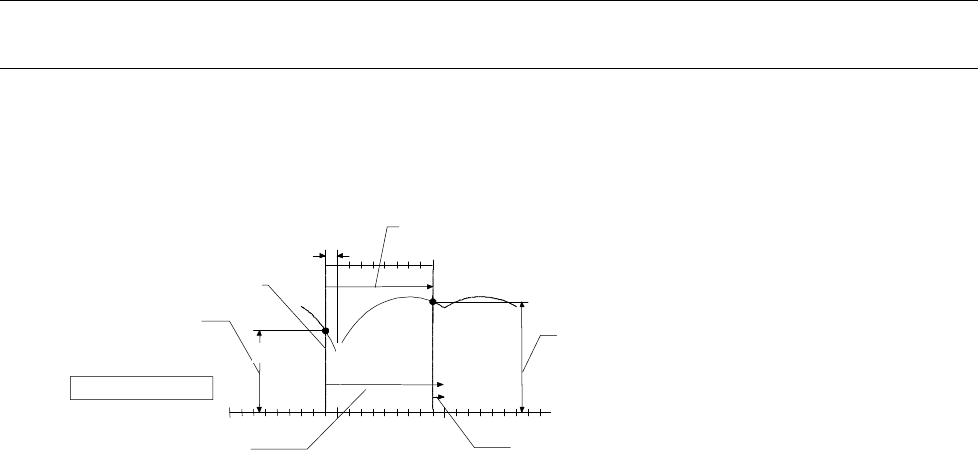
● 算法 3
这是第 1 最小宽度和第 2 最小宽度都用 ONCE 指令计算的组合。
因为没有角度关系,因此适用于不能通过扫描来计算最小宽度的元件。
アルゴリズム
3
第1最小巾
第2最小巾
α
Holdoff Angle 0 = 0
-14 -14
0゚
ヘッド
角度
Holdoff Angle 1 = 90
90゚
部品角度
(
LA 内
)
90゚0゚
Angle Limit 0 = 100 Angle Limit 0 = 10
第1最小宽度
第2最小宽度
贴装头角度
元件角度(LA内)
算法3
图 算法 3
此组合,在吸附了元件的状态下用 ONCE 指令计算第 1 最小宽度,再转动 90゚计算第 2 最小宽度。因
此,只进行 XY 的修正,不进行角度修正。
这是元件为圆柱形状等,不能用通常的 LA 定中心但是想贴装时的紧急处理用的。因此,使用此组合
时,不能保证贴装精度。
Rev.2 . 0 0
动作说明书
3-56
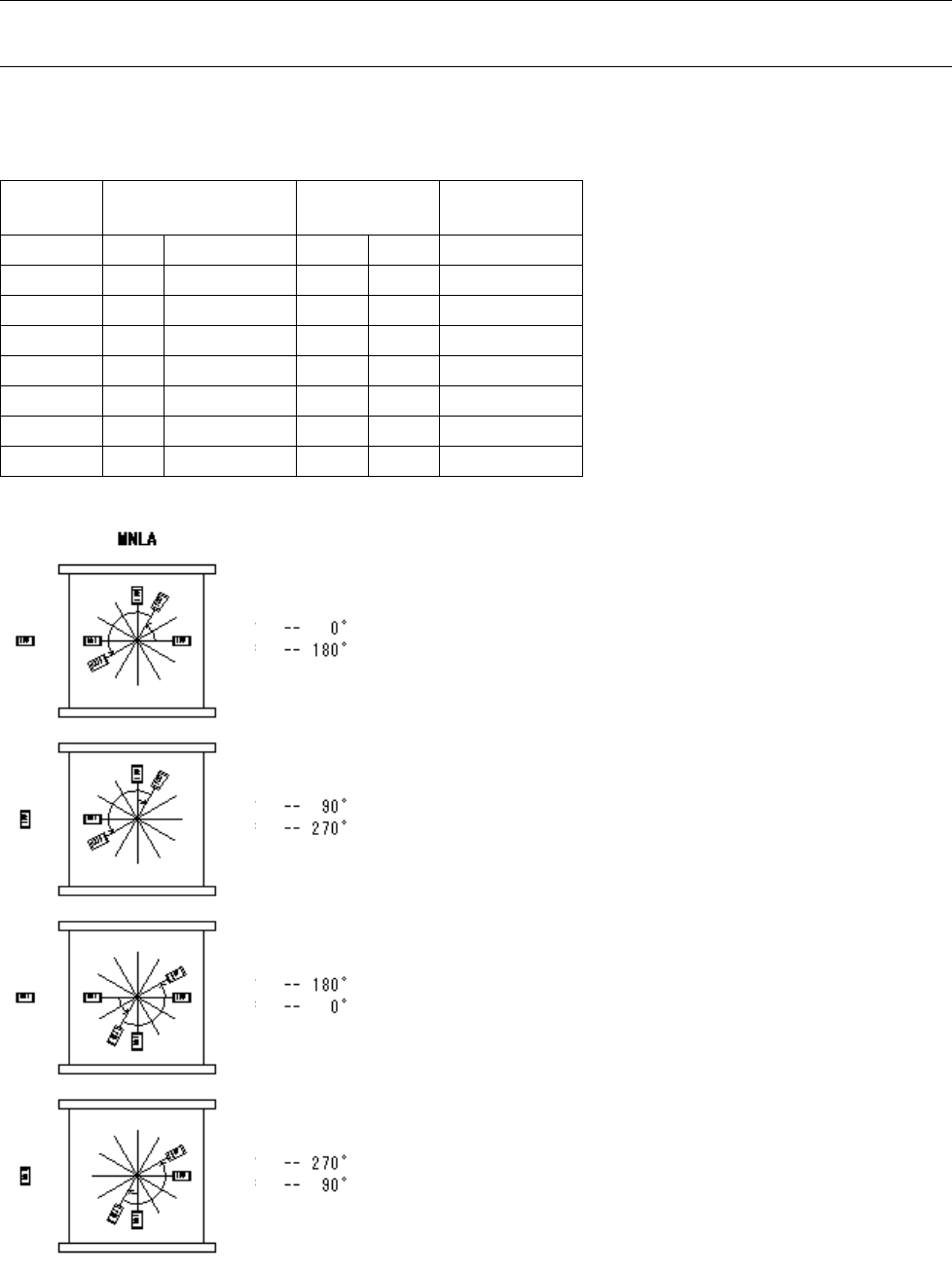
3-9-3.预供料姿势的决定
为了弄小预供料角度,根据元件供料角度决定以下的预供料姿势。
供料角度 吸附时贴装头角度 预载姿势
最小宽度时的
元件角度
0 前 0 60 (+60) 90
后 180 240 (+60) 270
90 前 90 60 (-30) 90
后 270 240 (-30) 270
180 前 180 240 (+60) 270
后 0 60 (+60) 90
270 前 270 240 (-30) 270
后 90 60 (-30) 90
前
后
前
后
前
后
前
后