FX-1R-FX-1动作说明书.pdf - 第69页
Rev.2 . 0 0 动作说明书 3-56 3-9-3 .预供料姿势的决定 为了弄小预供料角度,根据元件供料角度决定以下的预供料姿势。 供料角度 吸附时贴装头角度 预载姿势 最小宽度时的 元件角度 0 前 0 60 (+60) 90 后 180 240 (+60) 270 90 前 90 60 (-30) 90 后 270 240 (-30) 270 180 前 180 240 (+60) 270 后 0 60 (+60) 90 27…
Rev.2 . 0 0
动作说明书
3-55
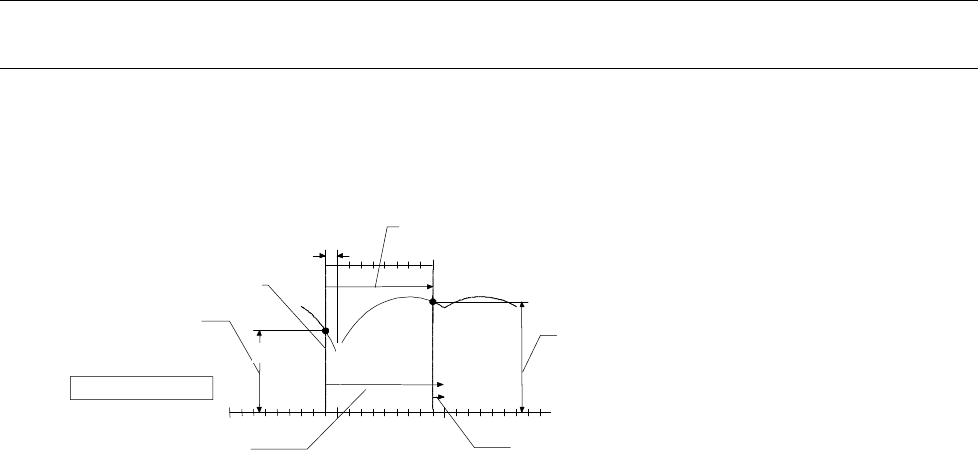
● 算法 3
这是第 1 最小宽度和第 2 最小宽度都用 ONCE 指令计算的组合。
因为没有角度关系,因此适用于不能通过扫描来计算最小宽度的元件。
アルゴリズム
3
第1最小巾
第2最小巾
α
Holdoff Angle 0 = 0
-14 -14
0゚
ヘッド
角度
Holdoff Angle 1 = 90
90゚
部品角度
(
LA 内
)
90゚0゚
Angle Limit 0 = 100 Angle Limit 0 = 10
第1最小宽度
第2最小宽度
贴装头角度
元件角度(LA内)
算法3
图 算法 3
此组合,在吸附了元件的状态下用 ONCE 指令计算第 1 最小宽度,再转动 90゚计算第 2 最小宽度。因
此,只进行 XY 的修正,不进行角度修正。
这是元件为圆柱形状等,不能用通常的 LA 定中心但是想贴装时的紧急处理用的。因此,使用此组合
时,不能保证贴装精度。
Rev.2 . 0 0
动作说明书
3-56
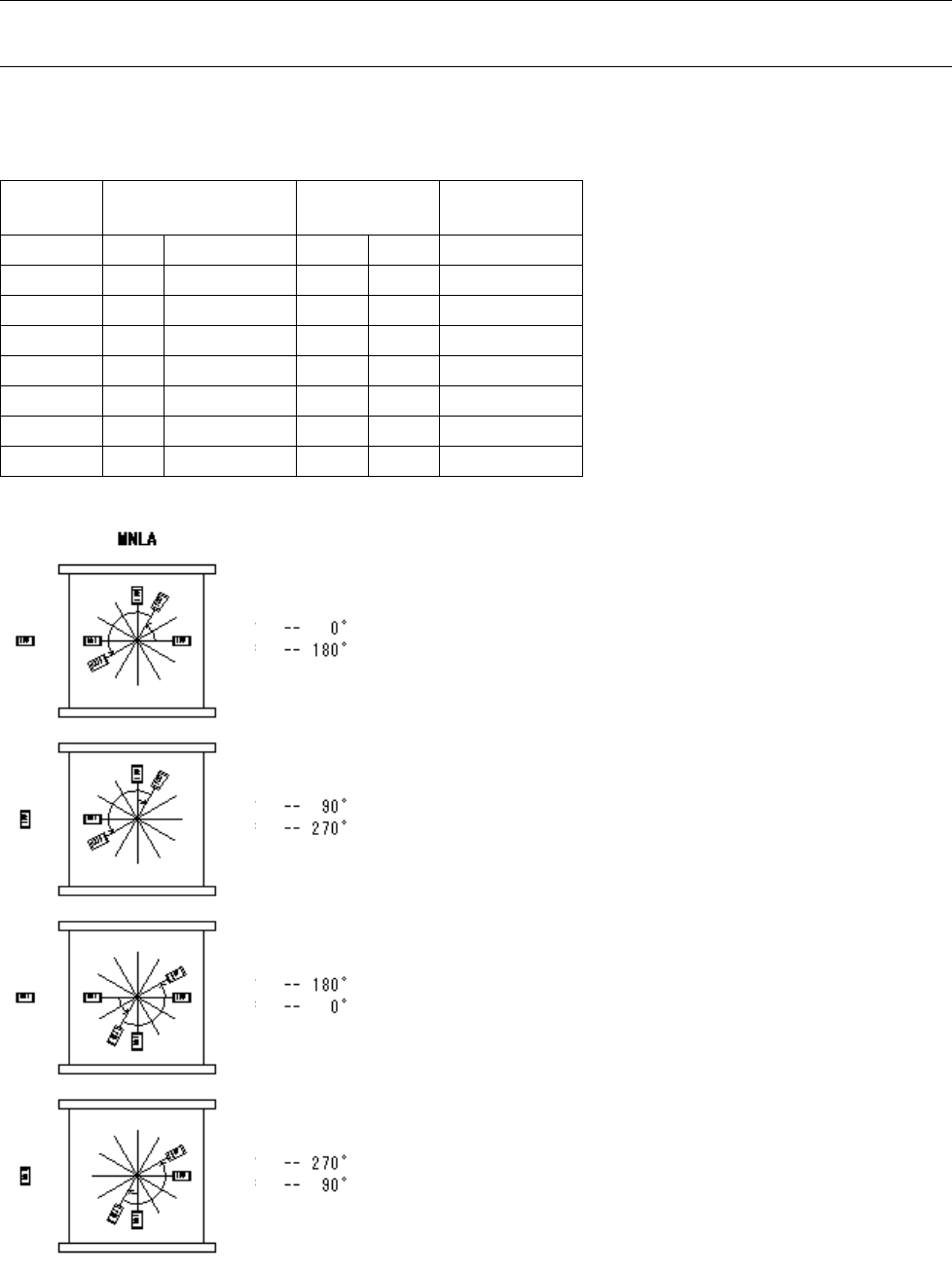
3-9-3.预供料姿势的决定
为了弄小预供料角度,根据元件供料角度决定以下的预供料姿势。
供料角度 吸附时贴装头角度 预载姿势
最小宽度时的
元件角度
0 前 0 60 (+60) 90
后 180 240 (+60) 270
90 前 90 60 (-30) 90
后 270 240 (-30) 270
180 前 180 240 (+60) 270
后 0 60 (+60) 90
270 前 270 240 (-30) 270
后 90 60 (-30) 90
前
后
前
后
前
后
前
后
Rev.2 . 0 0
动作说明书
3-57
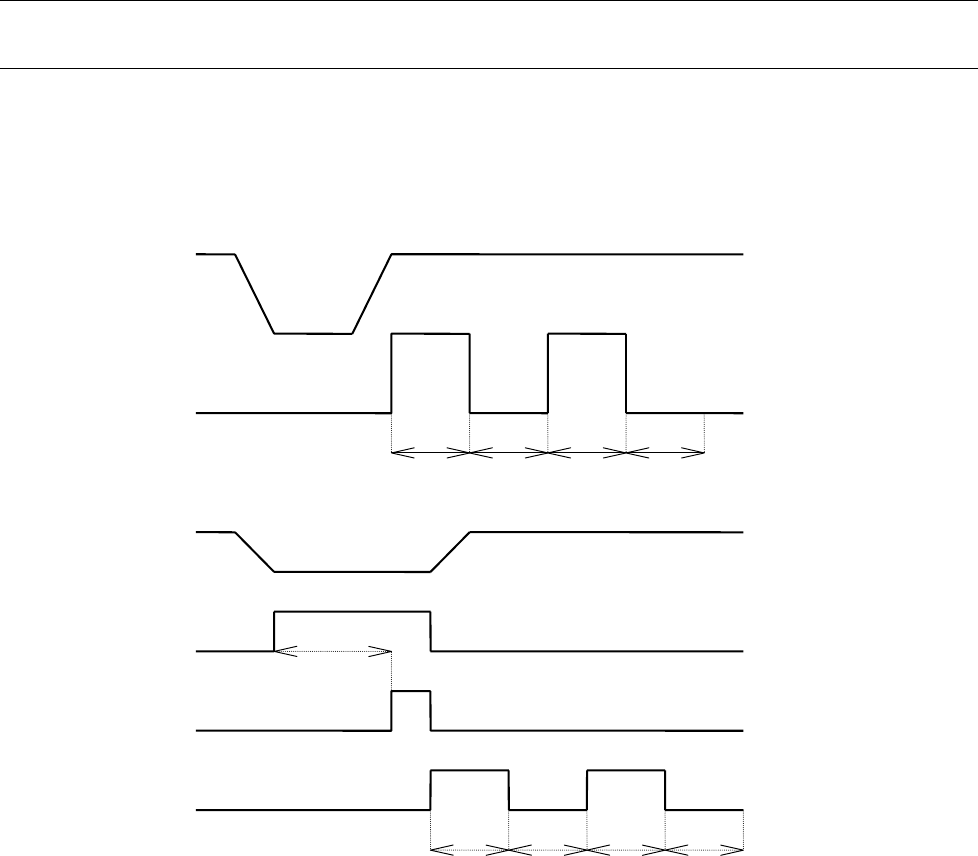
3-10.供料器的驱动
时间曲线图
①标准的供料传送(仅传送)
上升 A : byOnTime
Z B : byOffTime
下降 C : byPickhoid
供料器传送用推料器
A B A B
②需要保持吸附姿势时
Z下降
剥离等待时间 C
真空检查
供料器传送用推料器
A B A B