00192661-01.pdf - 第56页
1 Einleitung, Technische Daten Betriebsanleitung SIPLACE F5/F5 HM 1.13 Baugruppen ü ber sicht - Bes t ü ckk ö pfe Softwarevers ion SR.407.xx Ausgabe 01/2001 D E 56 1.13 Baugruppen ü bersicht - Best ü ckk ö pf e 1.13.1 Au…
Betriebsanleitung SIPLACE F5/F5 HM 1 Einleitung, Technische Daten
Softwareversion SR.407.xx Ausgabe 01/2001 DE 1.12 Baugruppenübersicht - Portal
55
1.12.3 Technische Daten der X-Achse
1.12.4 Aufbau der Y-Achse
Die y-Achse besteht im wesentlichen aus folgenden Hauptbaugruppen: 1
– Y-Drehstrom-Servomotor (F
5
HM), Gleichstrom-Servomotor (F
5
)
– Y-Zahnriemen
– Y-Führungssystem
– Y-Achsenmesssystem
1
Jede y-Achse wird von einem Drehstrom-Servomotor angetrieben. Eine Anticrashschaltung be-
grenzt die Verfahrwege der Portale gegeneinander. 1
1.12.5 Technische Daten der Y-Achse
Antrieb Drehstrom-Servomotor/Zahnriemen (F
5
HM)
Gleichstrom-Servomotor/Zahnriemen (F
5
)
Max. Geschwindigkeit 2,5 m/sec.
Verfahrweg 620 mm
Wegmesssystem Linearer Metallmaßstab
Maßstabslänge 646 mm
Auflösung 1,0 µm (F
5
HM)
2,5 µm (F
5
)
Antrieb Drehstrom-Servomotor / Zahnriemen (F
5
HM)
Gleichstrom-Servomotor / Zahnriemen (F
5
)
Max. Geschwindigkeit 2,5 m/sec.
Verfahrweg der Portale 910 mm
Wegmesssystem Lineare Metallmaßstäbe
Maßstabslänge 970 mm
Auflösung 1,0 µm (F
5
HM)
2,5 µm (F
5
)
1 Einleitung, Technische Daten Betriebsanleitung SIPLACE F5/F5 HM
1.13 Baugruppenübersicht - Bestückköpfe Softwareversion SR.407.xx Ausgabe 01/2001 DE
56
1.13 Baugruppenübersicht - Bestückköpfe
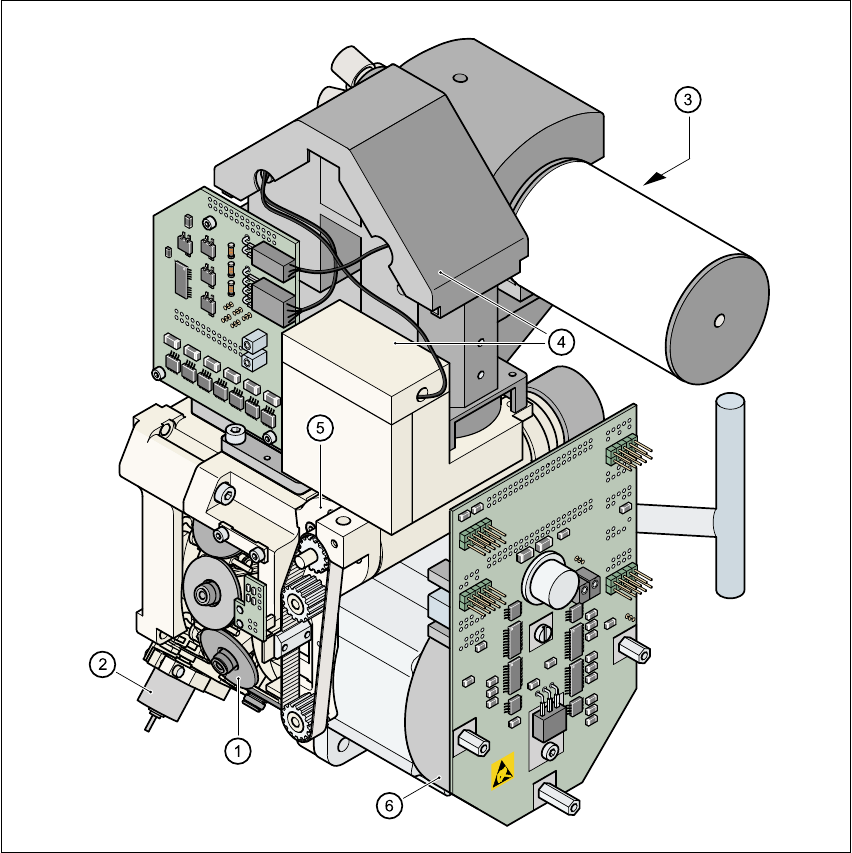
1.13.1 Aufbau des 12-Segment-Collect&Place-Kopfes
1
Abb. 1.13 - 1 Aufbau des 12-Segment-Collect&Place-Kopfes
1
(1) Stern mit 12 Pinolen (2) Motor, Ventilstellantrieb "Abwurf"
(3) Drehstation (4) BE-Visionmodul
(5) Z-Achsenantrieb (6) Sternmotor
Betriebsanleitung SIPLACE F5/F5 HM 1 Einleitung, Technische Daten
Softwareversion SR.407.xx Ausgabe 01/2001 DE 1.13 Baugruppenübersicht - Bestückköpfe
57
Alle Bauelemente werden mit der gleichen Taktzeit bestückt. Bevor das Bauelement bestückt
wird, wird es mit dem Visionmodul optoelektronisch vermessen. 1
– Die BE-Visionkamera erstellt ein Abbild des aufgenommenen Bauelements.
– Zudem wird die genaue Lage des Bauelements bestimmt.
– Die Gehäuseform des aufgenommen Bauelements wird mit der programmierten Gehäuseform
verglichen, um das Bauelement zu identifizieren. Nicht identifizierte Bauelemente werden ab-
geworfen.
– Die Drehstation dreht das Bauelement in die geforderte Bestücklage.
1.13.2 Beschreibung des 12-Segment-Collect&Place-Kopfes
– Der 12-Segment-Collect&Place-Kopf arbeitet nach dem Collect & Place - Prinzip, d. h. die
Bauelemente werden mit Hilfe eines Vakuums von den Pipetten aufgenommen und nach ei-
nem kompletten Aufnahmezyklus mit Hilfe von Blasluft sanft und positionsgenau auf die Lei-
terplatte aufgesetzt. Zugleich wird das Vakuum in den Pipetten mehrmals überprüft um
festzustellen, ob die Bauelemente auch korrekt abgeholt bzw. aufgesetzt wurden.
– Der "lernfähige" Sensorstopp-Modus der Z-Achse gleicht LP-Unebenheiten beim Absetzen
der Bauelemente aus.
– Fehlerhafte Bauelemente werden abgeworfen und in einem Reparaturlauf nachbestückt.
1.13.3 Technische Daten des 12-Segment- Collect&Place-Kopfes
Bauelementespektrum 0402 bis 18,7mm x 18,7mm inkl. BGA, µBGA, Flip-
Chip, TSOP, QFP, PLCC, SO bis SO32, DRAM
Max. Höhe 6 mm
Min. Beinchenraster 0,5 mm
Min. Abmessungen 0,5 mm x 1,0 mm
Max. Abmessungen 18,7 mm x 18,7 mm
Max. Gewicht 2 g
Max. Hub der z-Achse 16 mm
Programmierbare Aufsetzkraft 2,4 bis 5,0 N
Pipettentypen 9xx (F
5
HM), 7xx (F
5
)
Winkelgenauigkeit ± 0,525° / 3 σ, ± 0,70° / 4 σ, ± 1,05° / 6 σ
Bestückgenauigkeit ± 67,5 µm / 3 σ, ± 90 µm / 4 σ, ± 135 µm / 6 σ