NXT-IIc 系统手册.pdf - 第386页
8. NXT-2c 软件工具 SYS-NXTIIc-4.0S 368 NXT IIc 系统手册 10.单击 [Install] 后,就会将文件安装到对象 CPU 中。安装结束后显示信息。 11.单击 [OK], 关闭信息框。 12.将机器的主电源 开关为 OFF。 13.将向上设置的纽子开关返回到向下。 14.拆下与 C PU 连接的电 缆,重新连接原来的 电缆。 15.将 PC 的 IP 地 址返回到原来的数 值。 8.6.4 模组 …
SYS-NXTIIc-4.0S 8. NXT-2c 软件工具
NXT IIc 系统手册 367
8.6.3 模组 CPU 的恢复作业
1. 使用事先准备电缆连接恢复后的 CPU 箱和 PC。
2. 将 PC 的 IP 地址变更为 “169.254.0.200”。
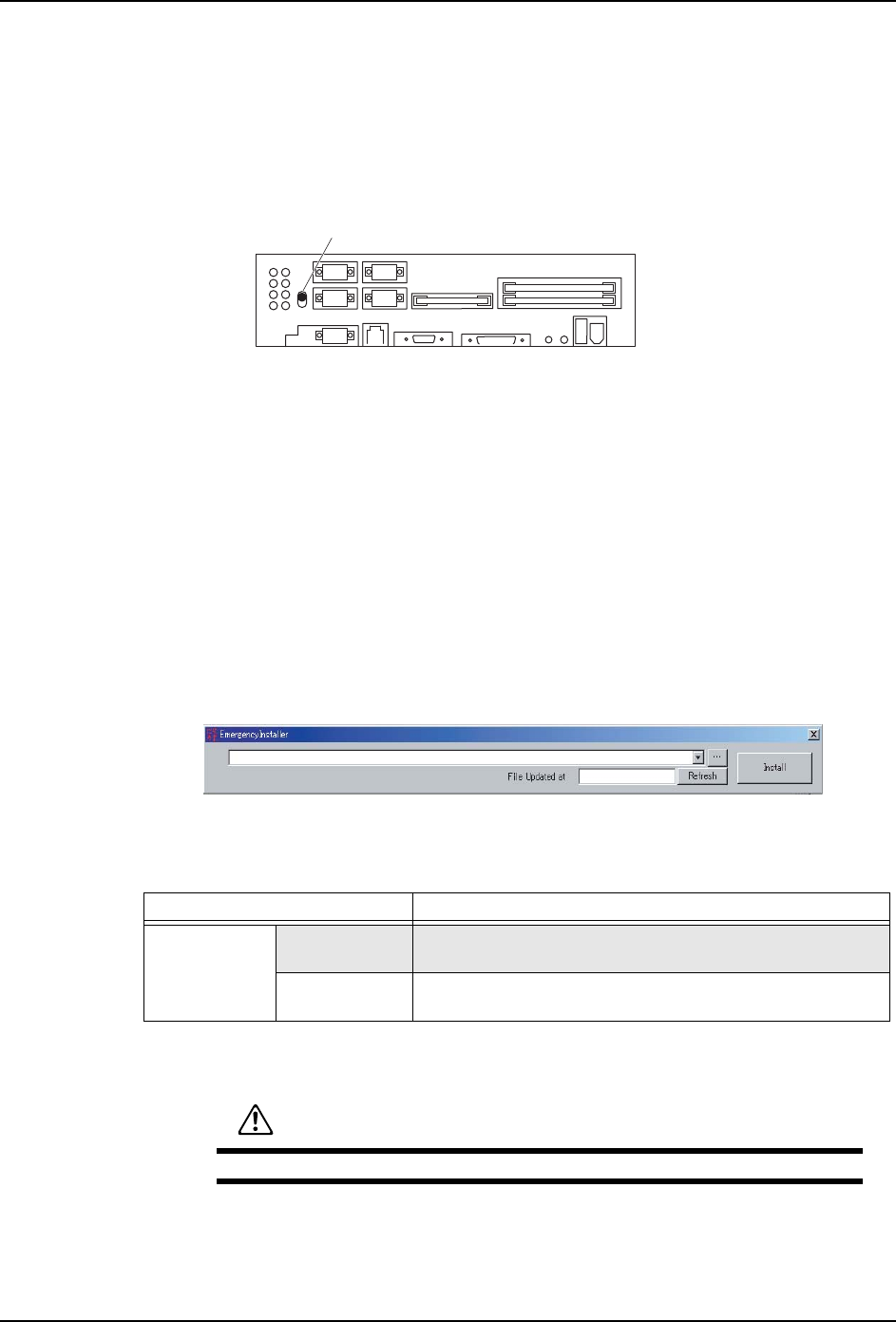
3. 将纽子开关向上设置。这样将 CPU 的电源 ON 时,CPU 就会以 emergency mode 启动。进行
对面型机械手的模组 CPU 恢复时,同时将边上 CPU 的纽子开关也向上设置。
4. 将机器的主电源开关为 ON。
5. 请进行以下作业。
a. 确认操作面板的 「STAND BY」指示灯是否从闪烁变为亮灯。指示灯状态不变继续闪
烁时,请与本公司代理店联系。
b. 按下 POWER 按钮。
c. 确认在数秒钟后显示出 "SELFCHECK PASS" 的文字。显示 "SELFCHECK FAIL MODULE"
的信息时,请与本公司代理店联系。
6. 将收录有软件的光盘插入光盘驱动器中,从资源管理器中启动光盘。
7. 双击 [NXT] 后,双击 [Tool]。
8. 双击 EmergencyInstaller.exe,启动软件。
9. 单击 [...],选择进行版本更新项目的 bin 文件。选择进行版本更新的单元的文件然后单
击 [ 打开 ],路径和文件就会显示在文本框内。
备注 )此处请选择 (*1)的文件。
安装对象 选择的 bin 文件
模组
M3(S),M6(S)
NXT\FujiInst\Fuji\System\Program\System
\Module.bin
M3-2, M6-2
M3-2c, M6-2c
NXT\FujiInst\Fuji\System2\Program\System
\Module2.bin(*1)
注意
bin 文件选择错误时,进行安装后会导致 CPU 不启动。
6<66
㒑ᄤᓔ݇
NXTST0005a

8. NXT-2c 软件工具 SYS-NXTIIc-4.0S
368 NXT IIc 系统手册
10.单击 [Install] 后,就会将文件安装到对象 CPU 中。安装结束后显示信息。
11.单击 [OK],关闭信息框。
12.将机器的主电源开关为 OFF。
13.将向上设置的纽子开关返回到向下。
14.拆下与 CPU 连接的电缆,重新连接原来的电缆。
15.将 PC 的 IP 地址返回到原来的数值。
8.6.4 模组 CPU 的恢复作业之后
需要进行以下的作业。
a. 传输 Job
b. 校正值的再测定指定
c. 模组功能设定
备注 )在更换 CPU 箱后,也需要再进行 [ 矩阵数据的注册 ] 和 [ 料站倾斜数据的注册 ]。关于
这些作业请参照辅助软件操作手册 [6. 对固有值的操作 ] 和 [12. 料站倾斜测定 ]。
除此以外,请确认贴装工作头上没有安装着吸嘴和机器内没有电路板。将机器的主电源开关
ON 之后,请进行以下的作业。
1. 请确认对象模组的序列 No.。
2. 请按照事先的备份,重新设定辅助软件的机器功能设定。
3. 请通过 Fuji Flexa 向模组传输 Job。如果别的模组正在生产中,请作为预约 Job 进行传
输,然后在机器上切换 Job。
4. 在吸嘴置放台内安装治具吸嘴,指定校正的重新测定。详细内容请参照 FUJI 辅助软件操
作手册 (在线手册)[ 如何进行校正值的再测定指定 ]。
5. 按下操作面板的 START 按钮后,开始校正。
备注 )因为元件相机升温需要时间,请在主电源开关为 ON 并经过 30 分钟以后执行此操作。
6. 如果使用最终手动修正进行精度补正时,请实施机上 PAM,算出最终修正量。详细请参照
[NXTIIc机械手册]的[9.1机上PAM(测定贴装精度)]。

SYS-NXTIIc-4.0S 8. NXT-2c 软件工具
NXT IIc 系统手册 369
8.7 MotionToolMini
使用该软件能够显示伺服计数器位置,或者能够更新 NXT-2c 机器的伺服参数,或者复位到
原位置。
8.7.1 MotionToolMini 的安装
使用该软件时,需要预先将该软件安装到 PC 上。
1. 将 NXT 软件 DVD(CD-ROM) 插入启动器中,中,从资源管理器中启动 CD-ROM。
2. 双击 [NXT] 后然后双击 [Tool],打开有安装程序的文件夹。
3. 双击 MotionToolMini.exe,开始安装处理。
4. 单击 [Next]。
5. 根据需要,指定要安装软件的目录,然后单击 [Next]。
6. 单击 [Next] 后,就会安装软件,显示最后的步骤。
7. 单击 [ 结束 ],结束安装处理。
8.7.2 MotionToolMini 的开始
1. 单击 [ 开始 ],然后指向 [ 程序 ],[Motion Tool Mini]。选择 [MotionTool (Mini)]
后,就会显示 [MTMINI] 对话框。
2. 将进行连接的基座的 IP 地址输入到主文本框内,然后输入模组号码。
3. 单击 [Connect] 后,就会显示主对话框。
8.7.3 伺服位置的显示
在进行伺服位置的显示之前,需要将控制用、工作头用以及伺服用电源设置到 ON。校正结
束后,进行生产的开始 / 停止,将这些电源设置到 ON。如果不能够开始生产时,使用 I/O 监
视器将这些电源强制变为 ON。
1. 启动 MotionToolMini.exe,然后连接到要显示伺服位置的模组上。
2. 单击 [Wake] 后,就会显示 [Wake Setting] 对话框。
3. 单击 [OK] 后,就会尝试伺服的启动。启动伺服有可能要花费一分钟左右。伺服启动后,
就会脉冲显示伺服位置。
8.7.4 转储文件的接收
1. 启动 MotionToolMini.exe,然后连接到要接收转储文件的模组上。
2. 单击 [Dump] 后,就会显示 [ 另存为 ] 对话框。
3. 指定转储文件的保存目录和文件名,按下 [ 保存 ] 时,用指定的文件名保存从伺服系统
中取得的文件。