00190973-02.pdf - 第235页
5 Funzioni Vision Istruzioni per l’uso SIPLACE 80S-20/F4/F4-6 5.3 Visionsystem CO Edizione 07/97 V ersione software dalla SR.403.xx 5 - 28 Preparato re Spettro dei compo nenti ri conosci bili : 060 3 ... 32 mm x 32 mm PL…
Istruzioni per l’uso SIPLACE 80S-20/F4/F4-6 5 Funzioni Vision
Edizione 07/97 Versione software dalla SR.403.xx 5.3 Visionsystem CO
Preparatore 5 - 27
5.3.3 Visionsystem CO nei dispositivi automatici di montaggio
SIPLACE 80 F
4
-6
5.3.3.1 Descrizione del sistema
Il Visionsystem CO è composto da
il sistema ottico per il riconoscimento della posizione dei componenti.
La
testa di montaggio a revolver da 6
possiede un sistema per il riconoscimento della posizione del CO
nella stazione 4 della stella (vedi Fig. 5.1.9, pagina 5 - 12).
Per la
testa di montaggio IC
possono essere impiegati fino a due Visionsystem CO. Essi sono fissati allo
statore della macchina del dispositivo automatico (vedi Fig. 5.1.6, pagina 5 - 9). Il primo serve al centrag-
gio ottico di componenti normali con collegamenti a piedino. Il secondo, munito di sensore FC, serve al
centraggio ottico di flip-chips (vedi „Opzione „Misura componente““, pagina 5 - 82).
l´unità di analisi Vision
L´unità di analisi per il riconoscimento della posizione del C.S. e del CO è collocata nell´innesto di
comando (vedi Fig. 5.1.10, pagina 5 - 13).
Sistema di riconoscimento di posizione del CO della testa di montaggio a revolver da 6
Una telecamera CCD con specchio rinvio, sistema ottico di raffigurazione e sistema di illuminazione LED
costituisce il sistema di riconoscimento di posizione ottico del CO.
Il campo visivo utilizzabile della videoca-
mera CCD (videocamera SONY XC75) è di 39 mm x 39 mm. Per il riconoscimento di posizione o per il test
dei piedini, il CO viene illuminato uniformemente dalle LED lineari con il processo di illuminazione dall´alto e
ne viene formata un´immagine ben distinta nel chip CCD con il sistema ottico. Con i metodi dell´elaborazione
digitale, con il procedimento HALE (High Accuracy Lead Extraction) vengono determinati i parametri di lun-
ghezza, l´angolo di rotazione e la condizione dei piedini.
L´unità di analisi Vision (MVS) è già stata descritta nella Sezione 5.2.1, dato che possiede entrambe le fun-
zioni di valutazione del C.S. e del CO.
Sistema di riconoscimento di posizione del CO per la testa IC con sensore IC
Vedi sezione 5.3.2.1, pagina 5 - 24
Sistema di riconoscimento di posizione del CO per la testa IC con sensore FC
Vedi sezione 5.3.2.1, pagina 5 - 24
5.3.3.2 Dati tecnici
Tipo di videocamera : SONY XC75
Numero dei pixel : videocamera 768 (H) x 493 (V), immagine 746(H) x 484 (V)
Campo visivo : 39 mm x 39 mm
Metodo di illuminazione : metodo di illuminazione dall´alto (luce rossa), piani a 2 LED
(piatti e verticali
)
Elaborazione dell´immagine: procedimento HALE (High Accuracy Lead Extraction) con
valori grigi
Schermo : monitor RGB (modalità VGA) 640 x 484 pixel
Dimensioni CO : 0,75 mm x 0,75 mm ... 32 mm x 32 mm
5 Funzioni Vision Istruzioni per l’uso SIPLACE 80S-20/F4/F4-6
5.3 Visionsystem CO Edizione 07/97 Versione software dalla SR.403.xx
5 - 28 Preparatore
Spettro dei componenti riconoscibili : 0603 ... 32 mm x 32 mm
PLCC SO, QFP, TSOP, SOT, MELF, CHIP, ICS, BGA
Distanza minima tra i piedini - : 0,5 mm
Diametro minimo del ball nei BGAs : 400 µm
Numero delle forme dell´involucro
≤
2047
5.3.3.3 Descrizione del funzionamento
Un segmento della testa di montaggio da 6 accetta un componente nella stazione 1 della stella. La stella
avanza di un passo, altri componenti vengono accettati. Nella stazione 7 della stella si trova l´unità ottica del
Visionsystem CO. Una volta giunto in questa posizione, file di LED spostate nello spazio illuminano il compo-
nente in modo uniforme con luce rossa. Il sistema ottico crea un´immagine chiara dei componenti sul chip
CCD della telecamera fino ad un´altezza di 5 mm.
L´immagine digitale del CO creata dalla telecamera dei componenti viene trasferita all´unità di analisi Vision.
Con l´aiuto dei metodi digitali di elaborazione dell´immagine (procedimento HALE), l´unità di valutazione con-
fronta l´immagine del CO con un modello sintetico creato nell´editore GF (forma dell´involucro). I parametri
che risultano forniscono informazioni relative alle differenze di posizione, agli angoli di rotazione, alla condi-
zione dei piedini ed alla reindividuazione del CO. Il procedimento HALE ha dato prova di essere estrema-
mente resistente nei confronti di influssi di disturbo come riflessi disturbati, comportamenti di riflessione
diversi dei piedini, influssi della luce diffusa ecc... È più veloce e più preciso del procedimento di matching
(comparazione). Dopo che avrete effettuato la misurazione, il segmento girerà il componente della stazione
della stella 9 nella giusta posizione di montaggio. Nella stazione della stella 1, il componente verrà poi mon-
tato nella posizione giusta sul circuito scheda.
Istruzioni per l’uso SIPLACE 80S-20/F4/F4-6 5 Funzioni Vision
Edizione 07/97 Versione software dalla SR.403.xx 5.3 Visionsystem CO
Preparatore 5 - 29
5.3.4 Criteri per la determinazione di componenti
Forma dei componenti
Con il centraggio ottico dei componenti è possibile centrare non solo componenti regolari, ma anche compo-
nenti irregolari. È ammesso un massimo di 99 piedini rispettivamente per la direzione verticale ed orizzontale.
Criteri per componenti regolari
Definizione
Un componente viene definito regolare quando sono soddisfatte le seguenti quattro condizioni:
–
forma di involucro rettangolare (caso particolare: forma quadrata))
–
solo un modello di piedino (tipo lead)
–
solo un gruppo di piedini per lato
–
solo un gruppo di piedini per fila di piedini
–
i gruppi di piedini l´uno di fronte all´altro sono rispettivamente simmetrici ad entrambi gli assi principali
(asse x, asse y).
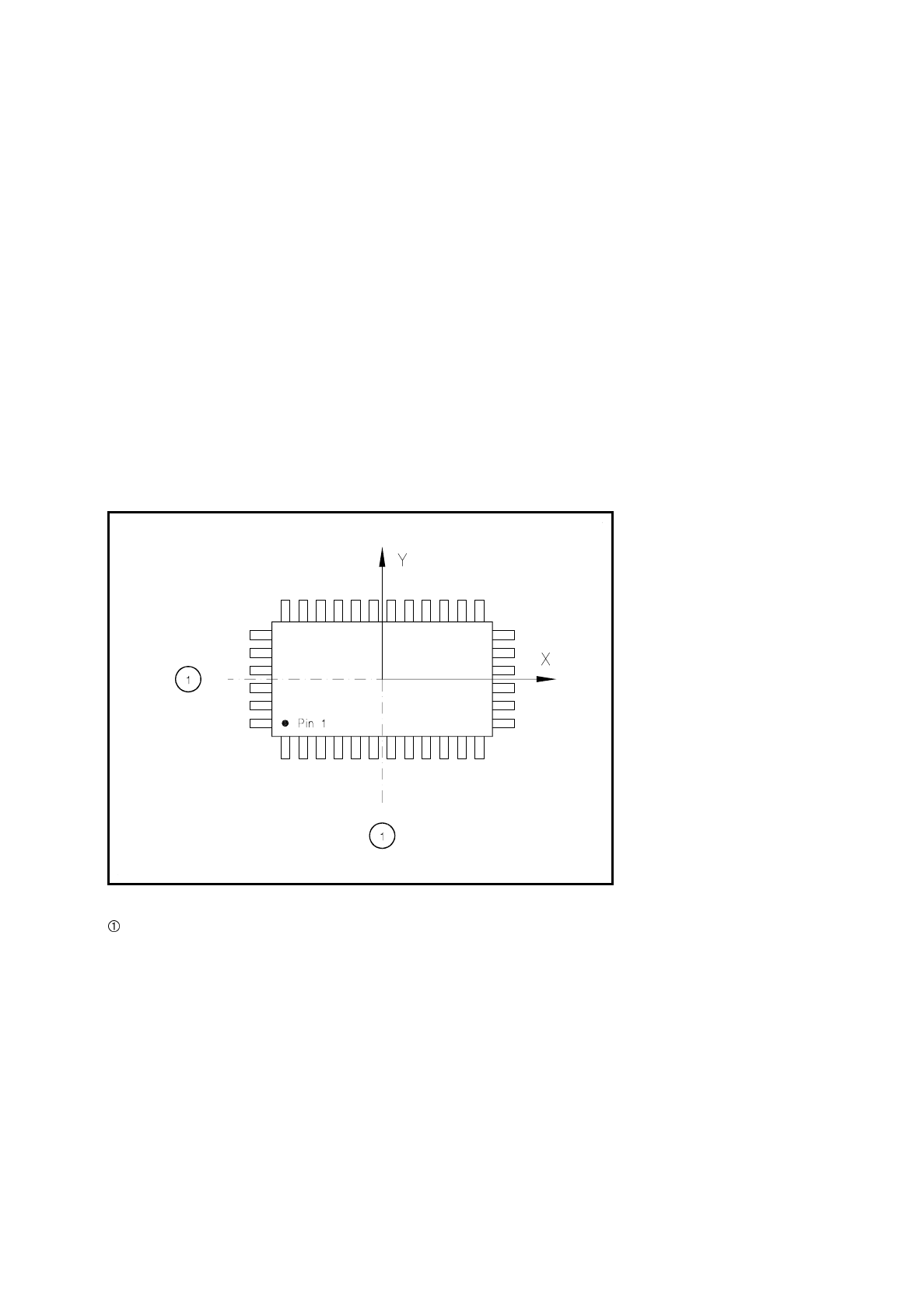
Fig. 5.3.1 Componente regolare
Asse di simmetria
Criteri per componenti irregolari
Definizione
Un componente viene definito irregolare se non sono soddisfatte le premesse valide per i componenti rego-
lari.
Condizioni aggiuntive per il centraggio con il Visionsystem CO:
–
in una fila sono permessi fino a 3 diversi modelli di piede.
–
In una fila sono permessi fino a 15 gruppi.