CM101程序手册.pdf - 第114页
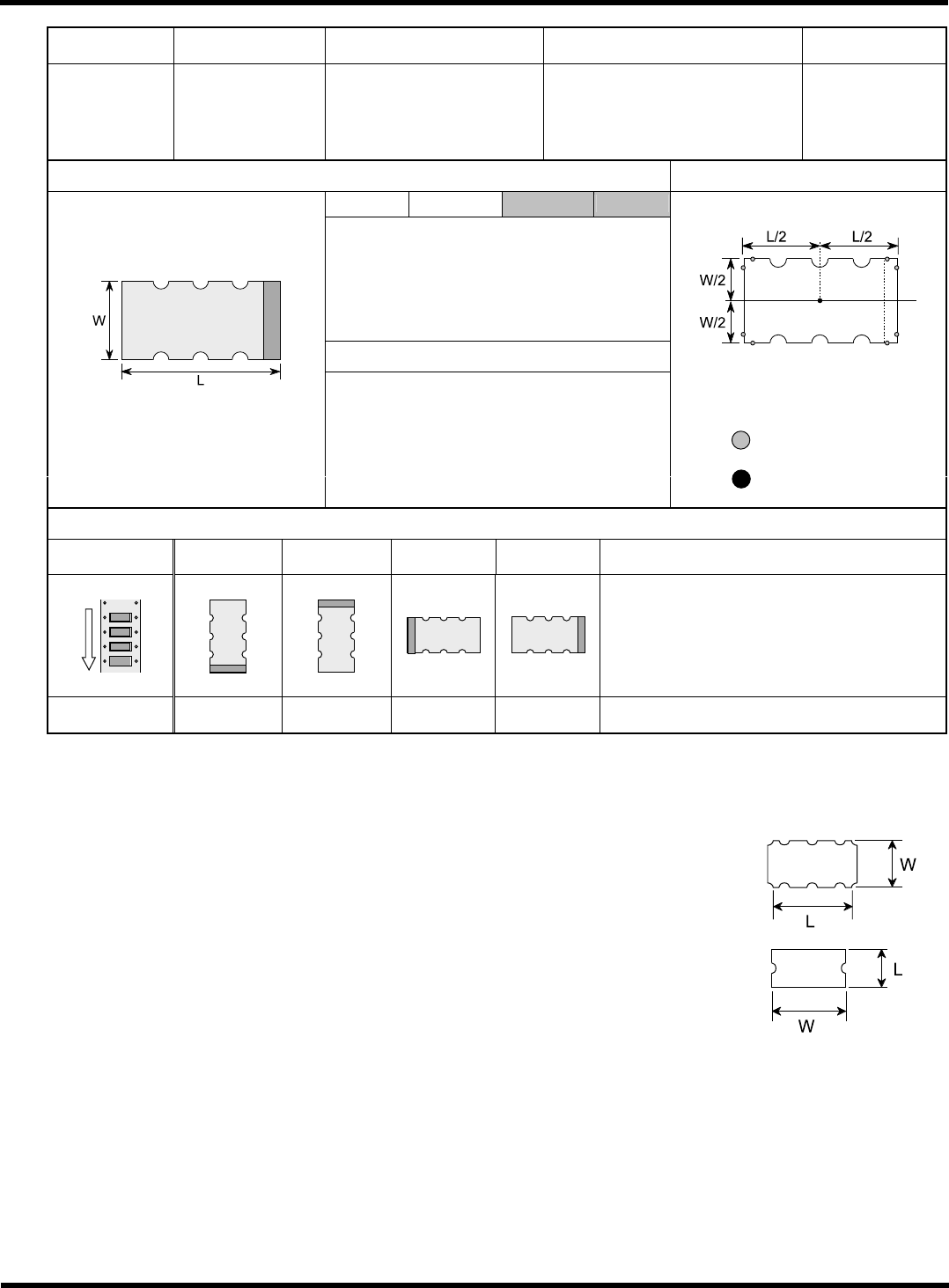
HGR40 附录 1.3 各种形状输入数 据项目 附录 1-22 形状编号 对象形状 参考编号 对象部品 ( 类别 ) 对应 Ver. 1h 包含四方形的特殊形 状 101 板弹簧 壳 等 V7.02 以上 形状以及输入数据 识别方式以及结果 长度 L 宽度 W 判断标准 1) 长度 : L − (20%), + (20%) 2) 宽度 : W − (20%), + (20%) 3) 角度 : ( 长方形 ) 识别角度 ± 60[ ° …
HGR40
附录
1.3
各种形状输入数据项目
附录
1-21
形状编号
对象形状
参考编号
对象部品
(
类别
)
对应
Ver.
1g
边不是直线的方形
131 ~ 135
电阻网络
等
V7.00
以上
形状以及输入数据
识别方式以及结果
长度
L
宽度
W
判断标准
1)
长度
: L
−
(22%),
+
(22%)
2)
宽度
: W
−
(22%),
+
(22%)
3)
角度:
(
长方形
)
识别角度
±
60[
°
]
(
正方形
)
识别角度
±
30[
°
]
(Top view)
4)
邻边的直交度
: 90
±
10[
°
]
等
在角点识别
(
只有
3
点角部也可进行识别
)
:
检测位置
:
检测中心
可识别姿势
(
只能识别以下式样
<
也有一部分例外
> )
式样编号
0 1 2 3
式样
进给方向
式样角度
±
0
°
±
180
°
+
90
°
−
90
°
(
备注
)
1.
芯片尺寸输入值
(
长度
L) / (
宽度
W)
在
1.2
以内时,可识别角度自动变为
±
30[
°
]
。此时,吸着角度由
式样角度超过
60[
°
]
的话,有可能旋转
90[
°
]
进行实装,请注意吸着状态。
2.
在
4
角部有凹的形状时,如右图所示设定
L
值
。
3.
输入芯片尺寸时,将有凹形的边作为长度
L
来输入。
HGR40-C-PMB01-A02-00
HGR40
附录
1.3
各种形状输入数据项目
附录
1-22
形状编号
对象形状
参考编号
对象部品
(
类别
)
对应
Ver.
1h
包含四方形的特殊形
状
101
板弹簧
壳
等
V7.02
以上
形状以及输入数据
识别方式以及结果
长度
L
宽度
W
判断标准
1)
长度
: L
−
(20%),
+
(20%)
2)
宽度
: W
−
(20%),
+
(20%)
3)
角度
: (
长方形
)
识别角度
±
60[
°
]
(
正方形
)
识别角度
±
30[
°
]
等
(Top view)
在直线部分确认
:
检测位置
:
检测中心
可识别姿势
(
只能识别以下式样
<
也有一部分例外
> )
式样编号
0 1 2 3
式样
进给方向
式样角度
±
0
°
±
180
°
+
90
°
−
90
°
(
备注
)
1.
芯片尺寸输入值
(
长度
L) / (
宽度
W)
在
1.2
以内时,可识别角度自动变为
±
30[
°
]
。此时,吸着角度由
式样角度超过
60[
°
]
的话,有可能旋转
90[
°
]
进行实装,请注意吸着状态。
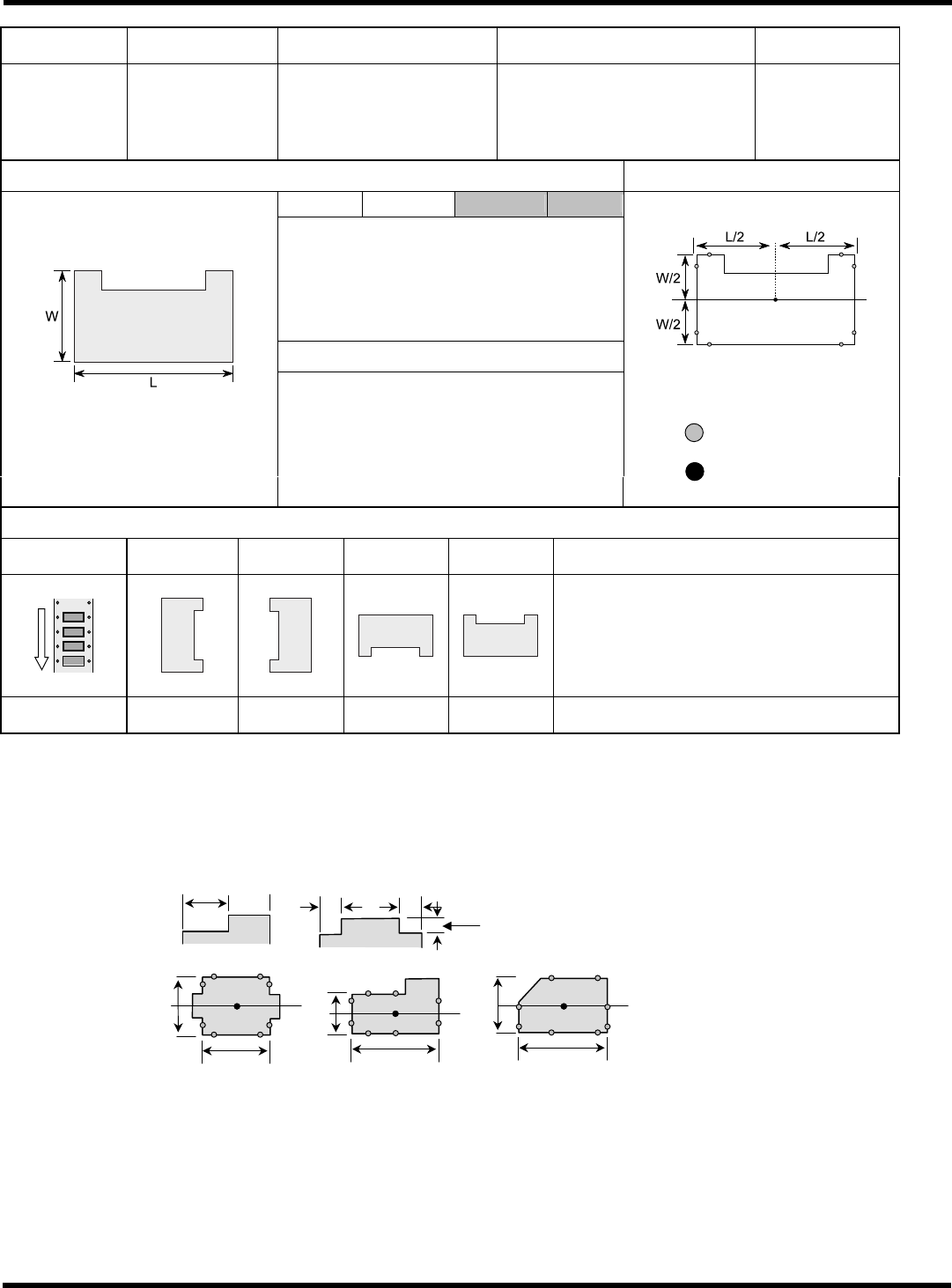
2.
可利用的形状
•
由
1
边的直线部占
50%
以上或离两端各占
20%
以上的边构成的四方形。
50%
以上
20%
以上
20%
以上
∗
在同一边上有
2
条以上的直线部时,与
L
或
W
之
间必需有
20%
以上的差异。
W
L
W
L
W
L
HGR40-C-PMB01-A02-00
HGR40
附录
1.3
各种形状输入数据项目
附录
1-23
形状编号
对象形状
参考编号
对象部品
(
类别
)
对应
Ver.
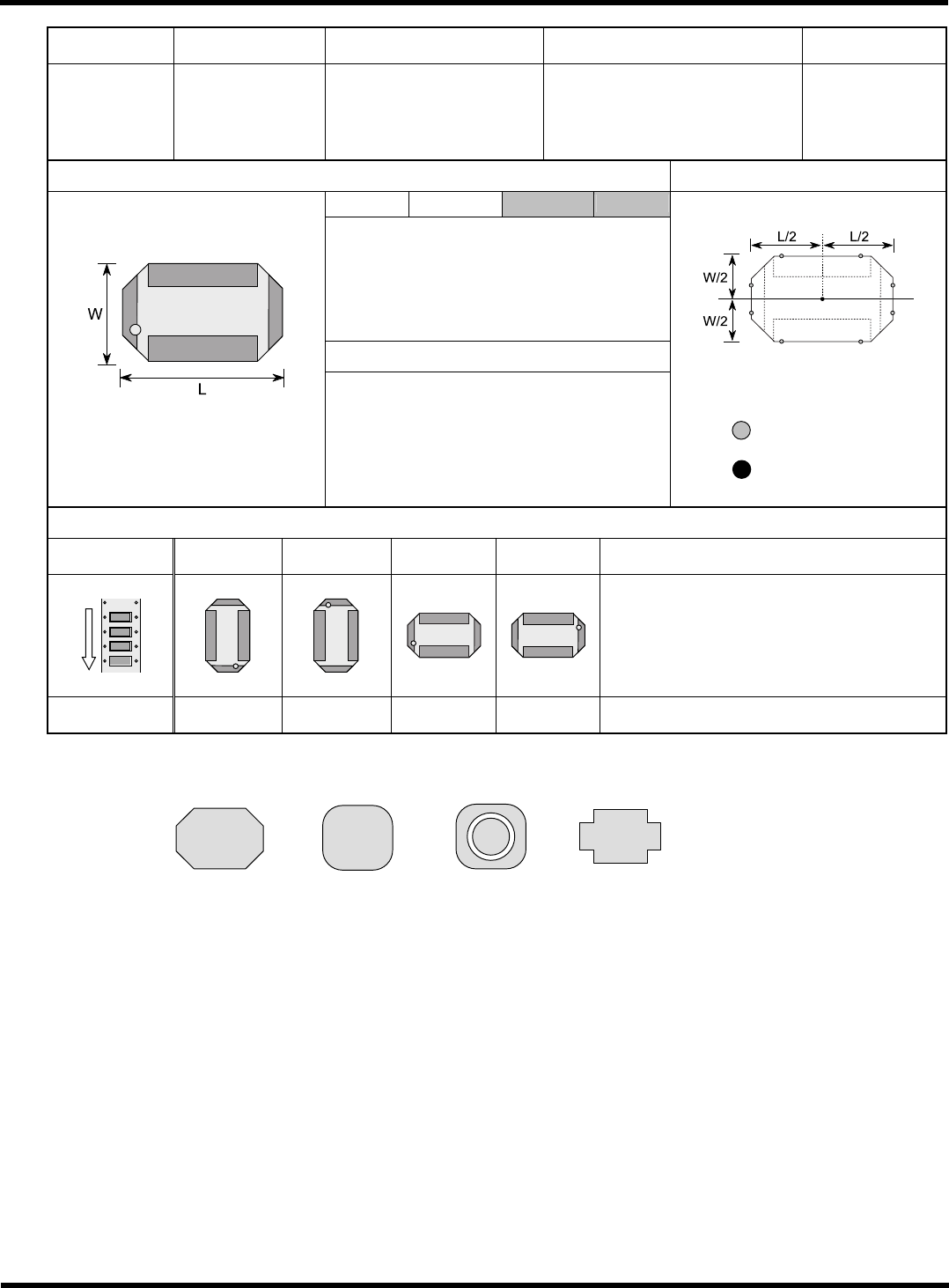
1i
角部有缺的四方形
156
壳
透明树脂部品
V7.00
以上
形状以及输入数据
识别方式以及结果
长度
L
宽度
W
判断标准
1)
长度
: L
±
(15%)
2)
宽度
: W
±
(25%)
3)
对边的平行度
:
±
10[
°
]
4)
角度
:
识别角度
±
30[
°
]
等
(Top view)
在直线部分确认
:
检测位置
:
检测中心
可识别姿势
(
只能识别以下式样
<
也有一部分例外
> )
式样编号
0 1 2 3
式样
进给方向
式样角度
±
0
°
±
180
°
+
90
°
−
90
°
(
备注
)
1.
可利用的部品形状
。
(Top view)
HGR40-C-PMB01-A02-00