CM101程序手册.pdf - 第174页
HGR40 附录 1.3 各种形状输入数 据项目 附录 1-82 形状编号 对象形状 参考编号 对象部品 ( 类别 ) 对应 Ver. 6a 特殊用途 1 125: 自动设定照明值 126: 手动设定照明值 基板识别标记 实装点识别标记 等 V7.00 以上 形状以及输入数据 识别方式以及结果 形状编号 色 尺寸 (a 、 b 、 c 、 d) 判断标准 参照下表 (Top view ) 1) 相关值 (= 匹配一致率比输入的阈值大。 …
HGR40
附录
1.3
各种形状输入数据项目
附录
1-81
形状编号
对象形状
参考编号
对象部品
(
类别
)
对应
Ver.
5m
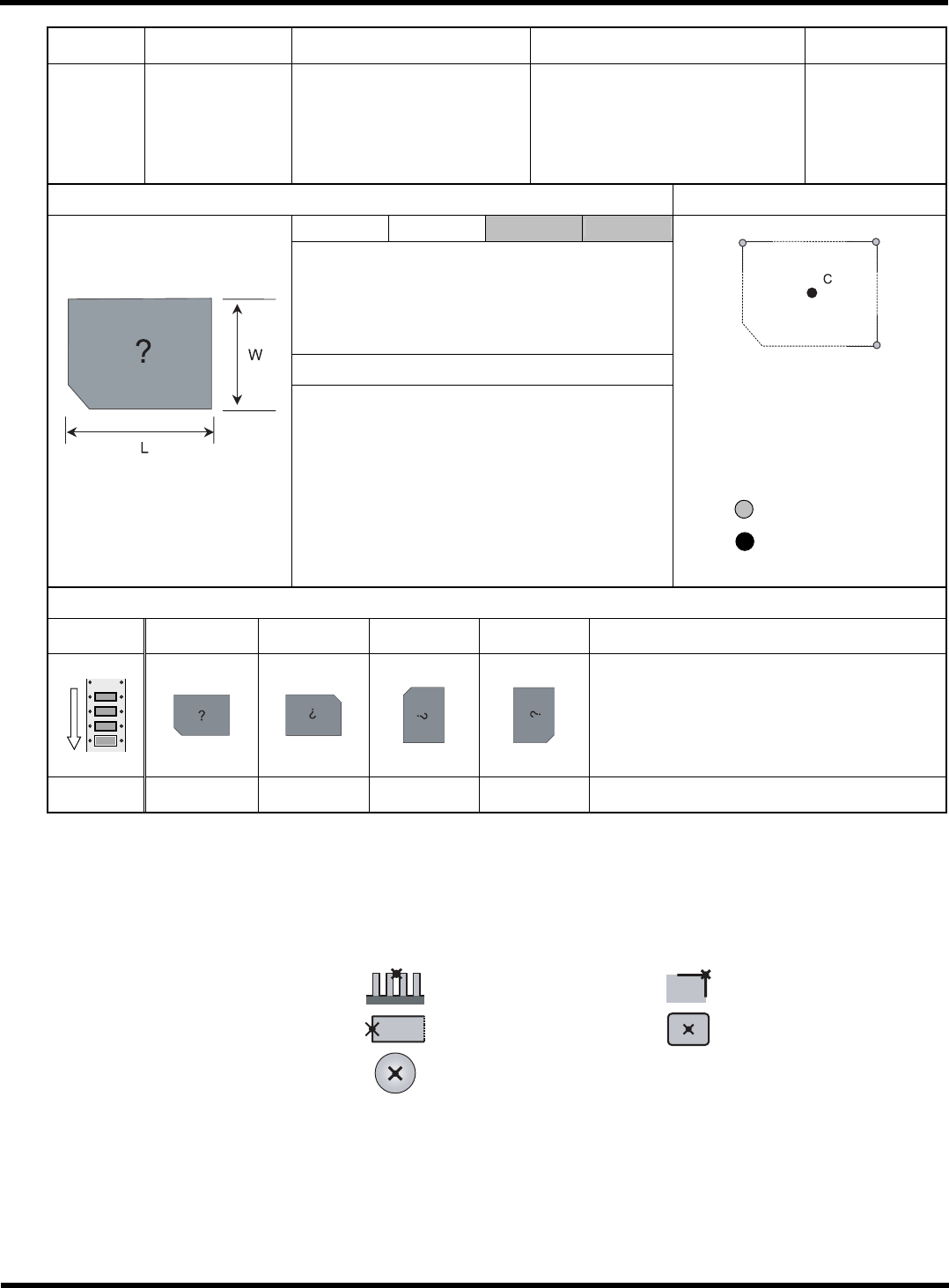
具有多个形状特征
的元件
236
(3D) 复合型元件
仅限于形状特征部分的图像在物理
形状上相一致时。进行浮起检查时,
仅限于检查位置的高度图像一样
时。
V1.02-013 以上
3D (
选购件
)
专用
系统
形状以及输入数据
识别方式以及结果
长度
L
宽度
W
判断标准
1)
先对
“
浮起检查
”
中所指定的位置进行平面近
似处理,然后以引线浮起容许值为基准,对
从该平面测量的浮起之绝对值进行检查。
(
在指定浮起检查时
)
2)
角度
:
识别角度
±
20[
°
]
等
(Top view)
·状上进行定位
(
上图为作为形状特征使用
3
个角
部的示例
)
·检查结果的中心可在任意的
位置上指定
:
检测位置
:
检测中心
可识别形状
(
只可识别以下形状
<
也有一部分例外
> )
式样编号
0 1 2 3
式样
进给方向
式样角度
±
0
°
±
180
°
+
90
°
−
90
°
(
备注
)
5.
此参照号为
3D
专用。同时进行定位和浮起
(
弯曲
)
检查。
未指定浮起检查时只进行定位。
6.
用
PT
编制输入数据。没有对应使用参考号
241
进行的数据转换。
7.
可用于定位的形状特征,如下所示。
1)
引线组
4)
角部
2)
电极
5)
长方形
3)
圆形
8.
为了检查浮起
(
弯曲
)
,有必要指定在
PT
上进行
4
处以上
“
浮起检查
”
。
在一般的情况下,该检查位置的必要条件为
:
全部检查位置必须是水平的平面、其周围不允许有凹凸
不平处、并发生适当的反射现象
(
非镜面、非吸收面
)
。
9.
在元件示较过程中无法正常看到
3D
图像时,有必要通过使用现物来调整光量下限值。但是,形状特
征和
“
浮起检查
”
以外位置的图像状态不会影响到识别结果。
HGR40-C-PMB01-A02-01
HGR40
附录
1.3
各种形状输入数据项目
附录
1-82
形状编号
对象形状
参考编号
对象部品
(
类别
)
对应
Ver.
6a
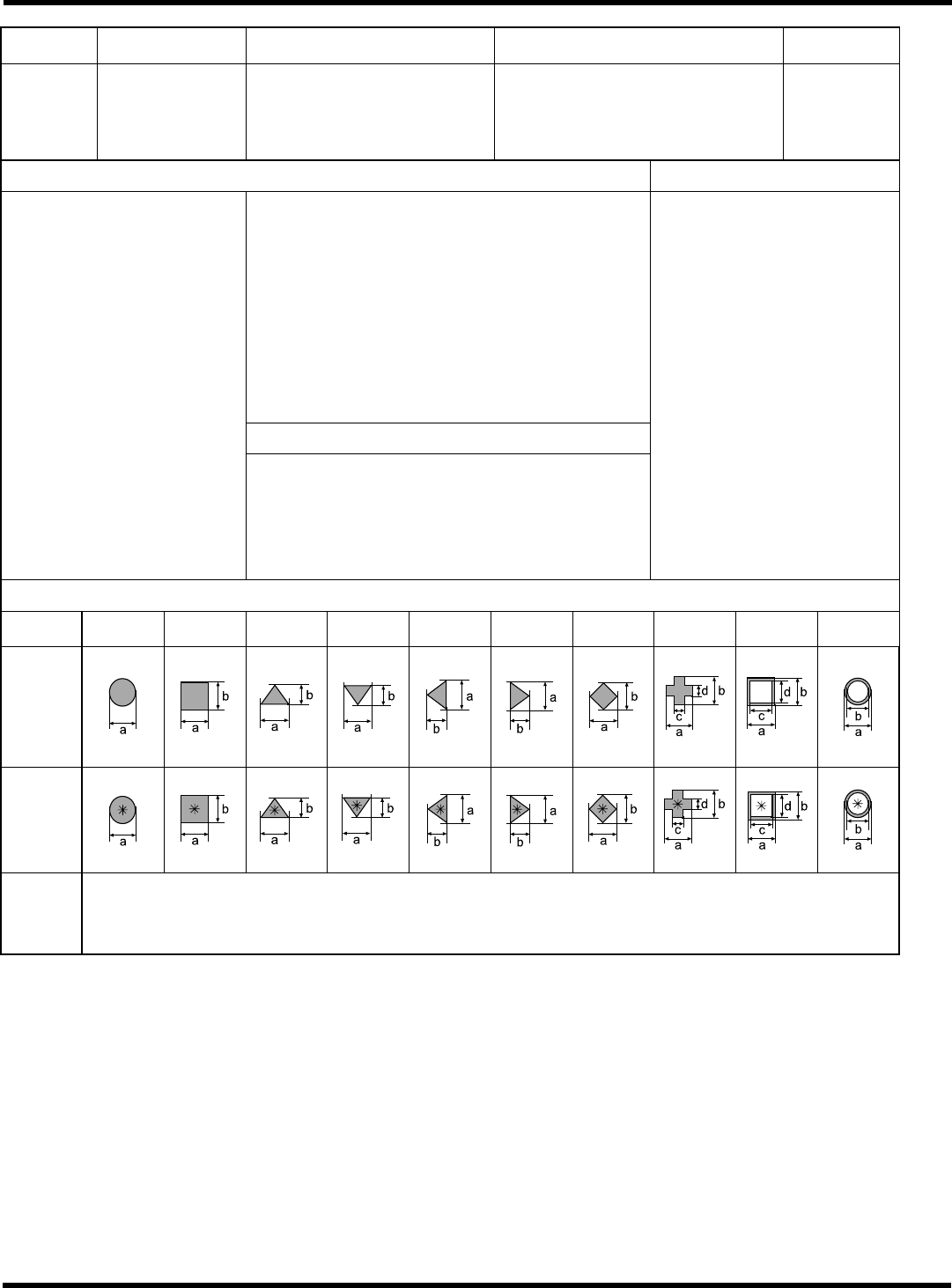
特殊用途
1 125:
自动设定照明值
126:
手动设定照明值
基板识别标记
实装点识别标记
等
V7.00
以上
形状以及输入数据
识别方式以及结果
形状编号
色
尺寸
(a
、
b
、
c
、
d)
判断标准
参照下表
(Top view)
1)
相关值
(=
匹配一致率比输入的阈值大。
)
参照下表
XY
坐标
:
中心坐标
ANS:
匹配的相关值
OK
时,归还
100
。
可识别形状
(
只可识别以下形状
<
也有一部分例外
> )
形状编号
1 2 3 4 5 6 7 8 9 10
形状
识别结果
(XY
坐标
)
备注
根据各标记
a
、
b
的中心坐标计算出识别结果。
(
圆形的为中心坐标
)
(
备注
)
1.
依据形状指定进行的基板识别是根据
·形状编号
·颜色
·尺寸
的数据制作目标图像,并通过匹配进行识别。
2.
参考编号为
125
时,识别装置将自动设定照明值。
不过,出现不良状况时,请使用参考编号
126
来设定照明值。
HGR40-C-PMB01-A02-02
HGR40
附录
1.4
轮廓识别错误信息
附录
1-83
1.
·
0000
附录
1.4
轮廓识别错误信息
附录
1.4.1
生产中的显示
轮廓识别
(
参考
No.51
以后
)
时,通过显示在画面上的识别结果代码
(A:
或者
ANS: )
,可以知道识
别结果。
识别结果代码
50
以上
:
识别正常结束
(
显示识别结果坐标、斜度
)
上述以外
:
识别错误
(
不可
)
所谓识别错误
(
不可
)
是指判定为不可识别或者不良部品的情况。
通过识别结果代码可以确认其内容。
(
附录
1.4.3
识别错误信息一览
)
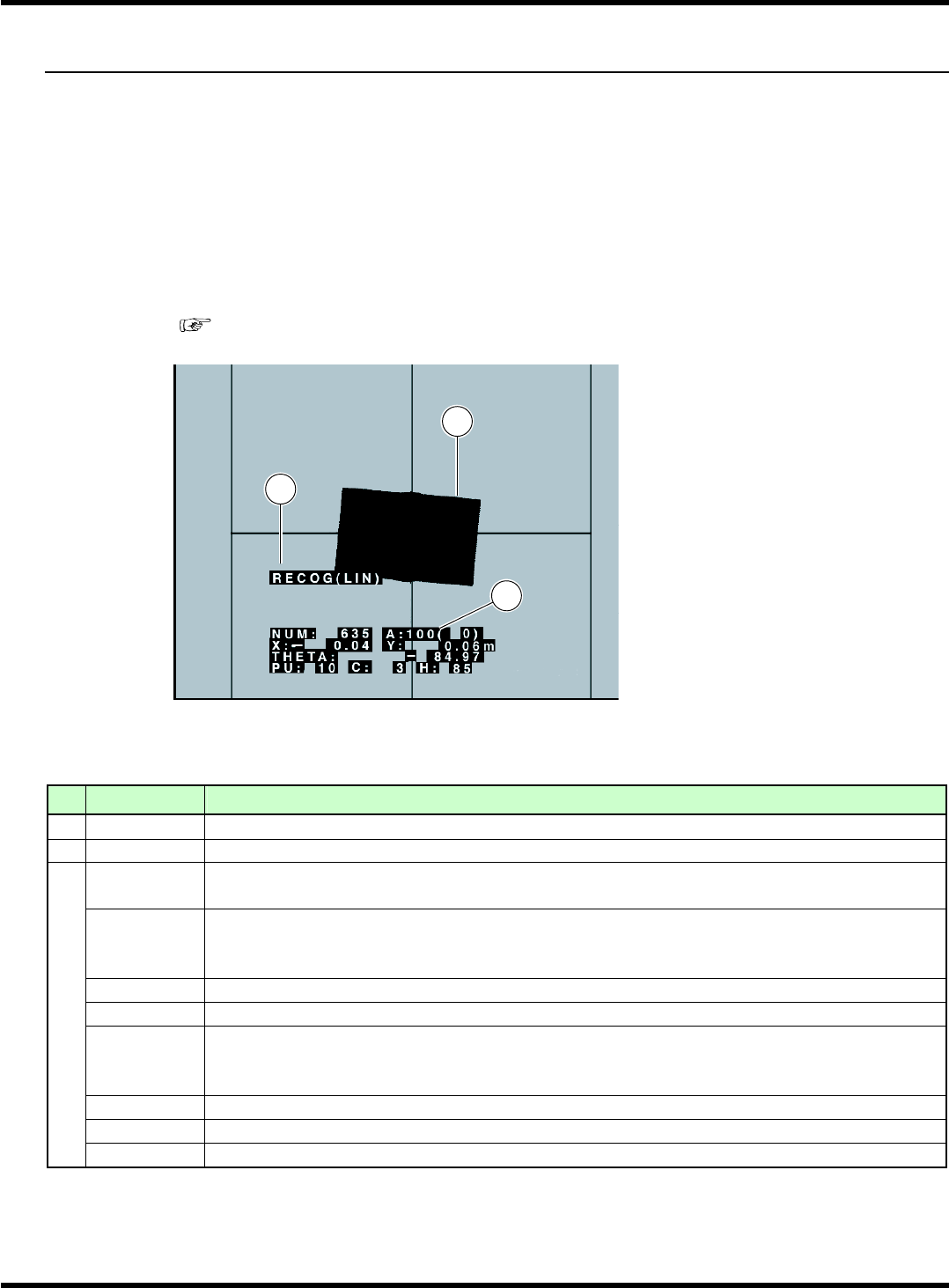
图
. 4-1
识别结果画面
(
运转时
)
No.
名称
说明
表示轮廓识别。
识别对象
NUM
轮廓点数
表示识别对象的轮廓像素点数。
A
识别结果代码
显示识别结果。
识别错误时,根据代码编号,能够知道内容。
X
识别结果
X
坐标
[mm]
Y
识别结果
Y
坐标
[mm]
THETA
识别结果斜度
[
°
]
识别正常结束时,显示识别对象的位置
(XY
坐标
)
以及斜度。
识别错误时,全部显示为
0
。
PU
装置编号
(PU
编号
)
C
芯片编号
H
吸头编号
∗
识别结果坐标显示距照相机中心
(
十字线中心
)
的距离。
(
图
. 4-2)
HGR40-C-PMB01-A03-00
HGR14-003E
1
2
3