CM101程序手册.pdf - 第149页
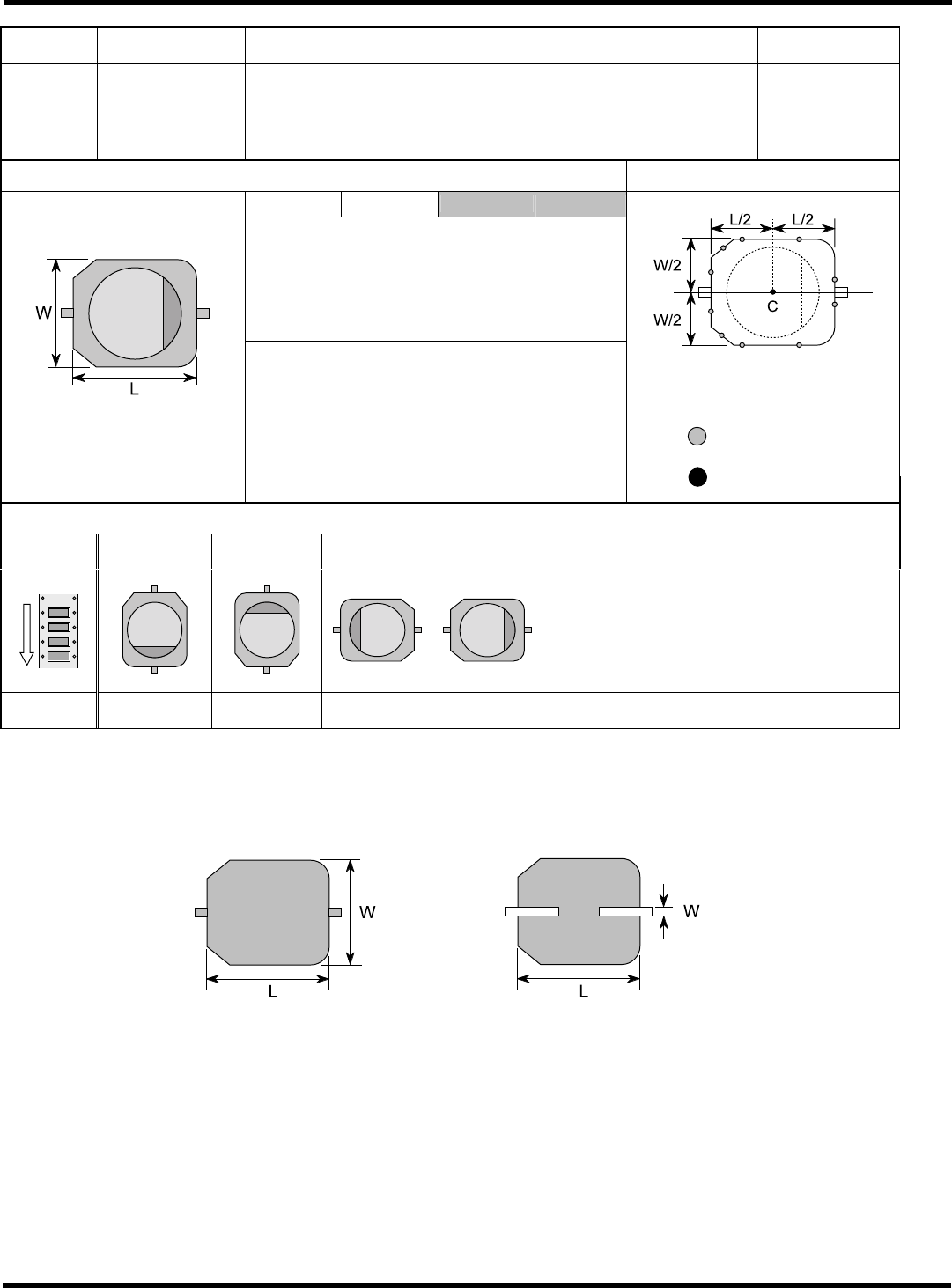
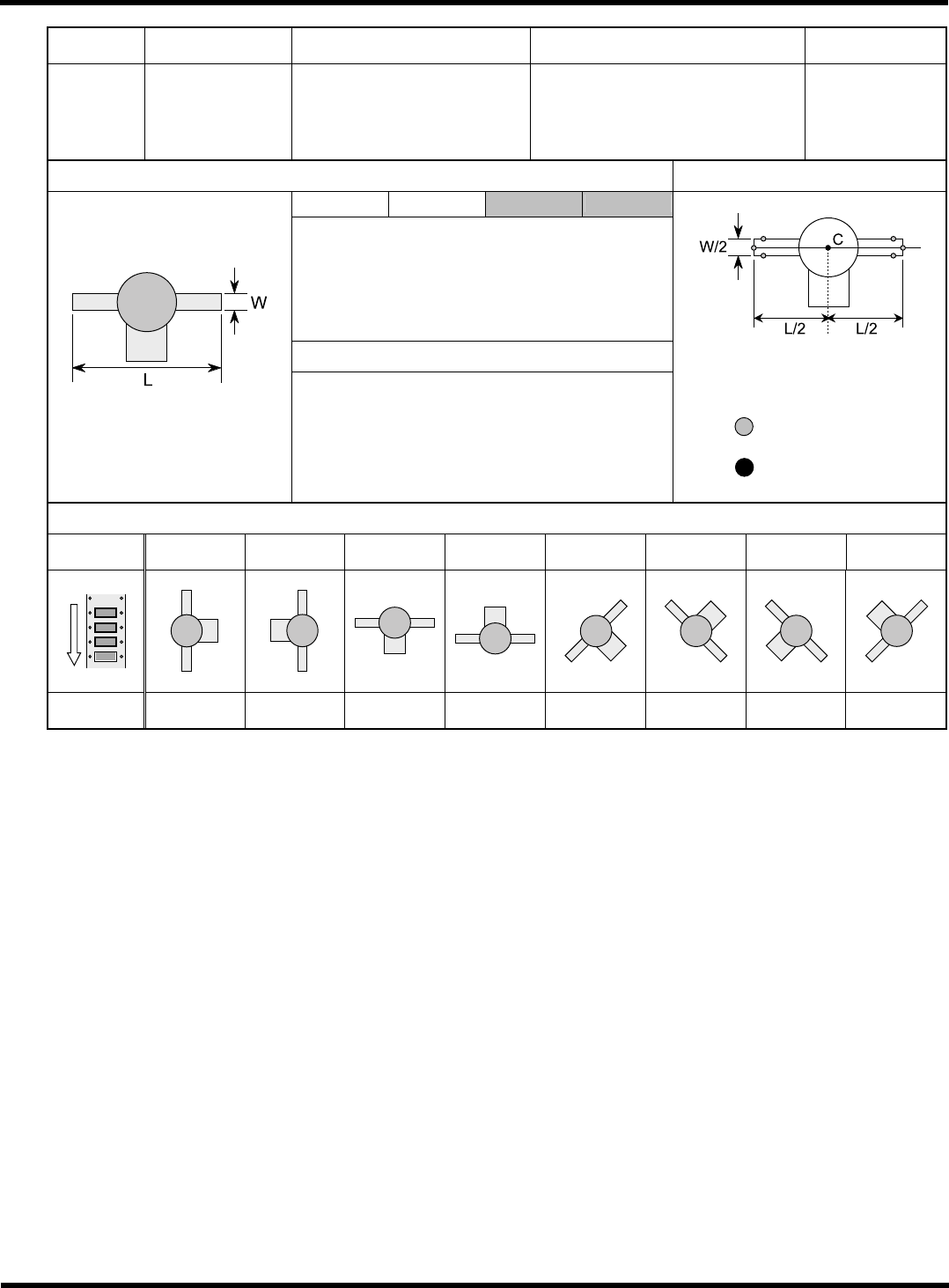
HGR40 附录 1.3 各种形状输入数 据项目 附录 1-57 形状编号 对象形状 参考编号 对象部品 ( 类别 ) 对应 Ver. 5e 特殊形 5 76 3Pin-F ET 等 V7.00 以上 形状以及输入数据 识别方式以及结果 长度 L 宽度 W 判断标准 1) 长度 : L ± (20%) 2) 宽度 : W − (30%), + (50%) 3) 角度 : 识别角度 ± 30[ ° ] 等 (Top view ) 在 2 …
HGR40
附录
1.3
各种形状输入数据项目
附录
1-56
形状编号
对象形状
参考编号
对象部品
(
类别
)
对应
Ver.
5d
特殊形
4
71 ~ 72
铝电解电容器
等
V7.00
以上
形状以及输入数据
识别方式以及结果
长度
L
宽度
W
判断标准
1)
长度
: L
−
(30%),
+
(20%)
2)
宽度
: W
−
(30%),
+
(20%)
3)
角度
:
识别角度
±
60[
°
]
等
(Top view)
在直线部分识别
:
检测位置
:
检测中心
可识别姿势
(
只可识别以下式样
<
也有一部分例外
> )
式样编号
0 1 2 3
式样
进给方向
式样角度
±
0
°
±
180
°
+
90
°
−
90
°
(
备注
)
1.
根据元件高度,有些元件因受到邻接元件的影响,故在如下情况下无法进行元件识别
:
通过高速吸头
(12
吸嘴
)
、通用吸头
(LS8
吸嘴
)
被邻接吸嘴吸着。在此情况下请改为通过
No.81
的元件反面电极识
别。
No. 71
HGR40-001E
No. 81
HGR40-001E
(Bottom View)
HGR40-C-PMB01-A02-02
HGR40
附录
1.3
各种形状输入数据项目
附录
1-57
形状编号
对象形状
参考编号
对象部品
(
类别
)
对应
Ver.
5e
特殊形
5
76
3Pin-FET
等
V7.00
以上
形状以及输入数据
识别方式以及结果
长度
L
宽度
W
判断标准
1)
长度
: L
±
(20%)
2)
宽度
: W
−
(30%),
+
(50%)
3)
角度
:
识别角度
±
30[
°
]
等
(Top view)
在
2
根引线的顶端识别
:
检测位置
:
检测中心
可识别姿势
(
只可识别以下式样
<
也有一部分例外
> )
式样编号
0 1 2 3 4 5 6 7
式样
进给方向
式样角度
±
0
°
±
180
°
+
90
°
−
90
°
+
45
°
−
45
°
+
135
°
−
135
°
(
备注
)
1.
不辨别极性。
2.
引线数较多时,在接近指定式样的角度检测接近尺寸
L
的对角
2
引线。
HGR40-C-PMB01-A02-01
HGR40
附录
1.3
各种形状输入数据项目
附录
1-58
形状编号
对象形状
参考编号
对象部品
(
类别
)
对应
Ver.
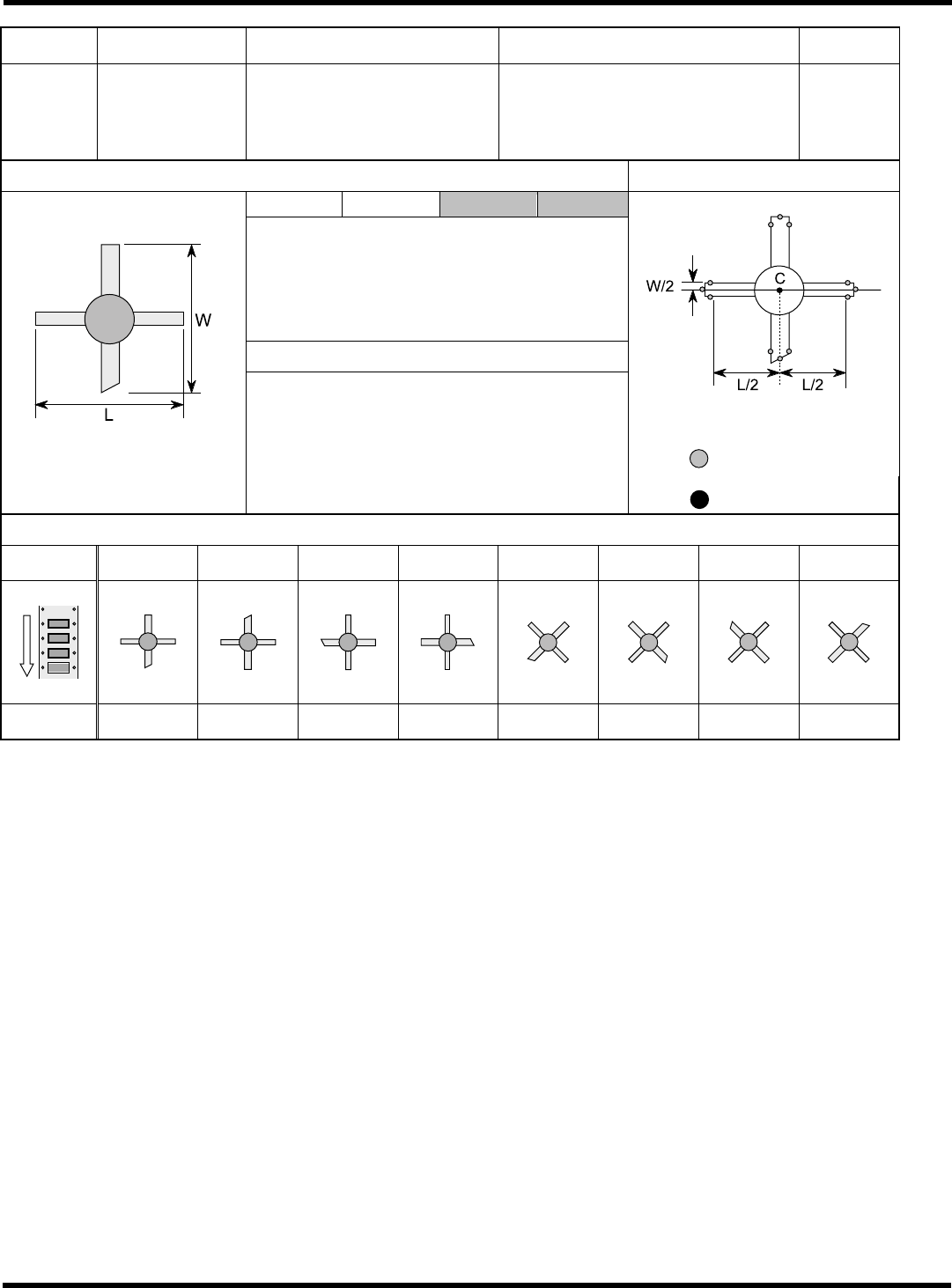
5f
特殊形
6
90 ~ 91 FET
等
V7.00
以上
形状以及输入数据
识别方式以及结果
长度
L
宽度
W
判断标准
1)
长度
: L
±
(20%)
2)
宽度
: W
±
(20%)
3)
角度
:
识别角度
±
30[
°
]
等
(Top view)
在
4
根引线顶端识别
:
检测位置
:
检测中心
可识别姿势
(
只可识别以下式样
<
也有一部分例外
> )
式样编号
0 1 2 3 4 5 6 7
式样
进给方向
式样角度
±
0
°
±
180
°
+
90
°
−
90
°
+
45
°
−
45
°
+
135
°
−
135
°
(
备注
)
1.
为了避免旋转
90
度引起的误识别,可识别的角度将变窄。
(
吸着角度
±
30
度
)
2.
超过吸着角度
±
60
度吸着时,有可能在旋转
90
度的状态下进行实装,请注意吸着状态。
HGR40-C-PMB01-A02-01