CM101程序手册.pdf - 第94页
HGR40 附录 1.1 识别方式概要 附录 1-2 1. 附录 1.1 识别方式概要 附录 1.1.1 识别方式的种类 识别装置如表 1-1 所示,根据参考编 号,识别装置可以识别 3 种类型。 请根据识别对象进行使 用。 名称 参考 特征 对象 1 4 点区块匹配 1 ~ 46 1: 预先进行主图像的示教 ,并识别与主图像的 偏移量。 2: 需要预先进行主图像的 示教。 3: 根据 4 区块的主图像求出 位置偏移量 (XY 坐 标 …
HGR40
附录
1-1
1.
附录
1.
识别装置
(HGR-40)
在此对识别装置
(HGR-40)
进行了说明。
N7201A006C07
(HGR40-C-PMBA-0004)
HGR40-C-PMB01-A00-04
HGR40
附录
1.1
识别方式概要
附录
1-2
1.
附录
1.1
识别方式概要
附录
1.1.1
识别方式的种类
识别装置如表
1-1
所示,根据参考编号,识别装置可以识别
3
种类型。
请根据识别对象进行使用。
名称
参考
特征
对象
1
4
点区块匹配
1 ~ 46
1:
预先进行主图像的示教,并识别与主图像的
偏移量。
2:
需要预先进行主图像的示教。
3:
根据
4
区块的主图像求出位置偏移量
(XY
坐
标
)
、斜度。
·没有登录到附录
1.2.2
参考编号
一览表上的
·新部品等
2
1
点区块匹配
47 ~ 50
1:
预先进行主图像的示教,并识别与主图像的
偏移量。
2:
需要预先进行主图像的示教。
3:
根据
1
区块的主图像求出位置偏移量
(XY
坐
标
)
。不求出斜度。
·基板识别标记
·实装点识别标记
1:
以轮廓上的特征点为基准,求出位置偏移量
(XY
坐标
)
、斜度。
2:
不需要预先进行主图像的示教。
·角形芯片
·微型模
晶体管等
3
轮廓识别
51 ~ 250
3:
每一参考的对象形状是固定不变的。
4:
识别不良时,通过代码能够分析不良要因。
·基板识别标记
·实装点识别标记
等
表
1-1
识别方式
[
轮廓识别的特征
]
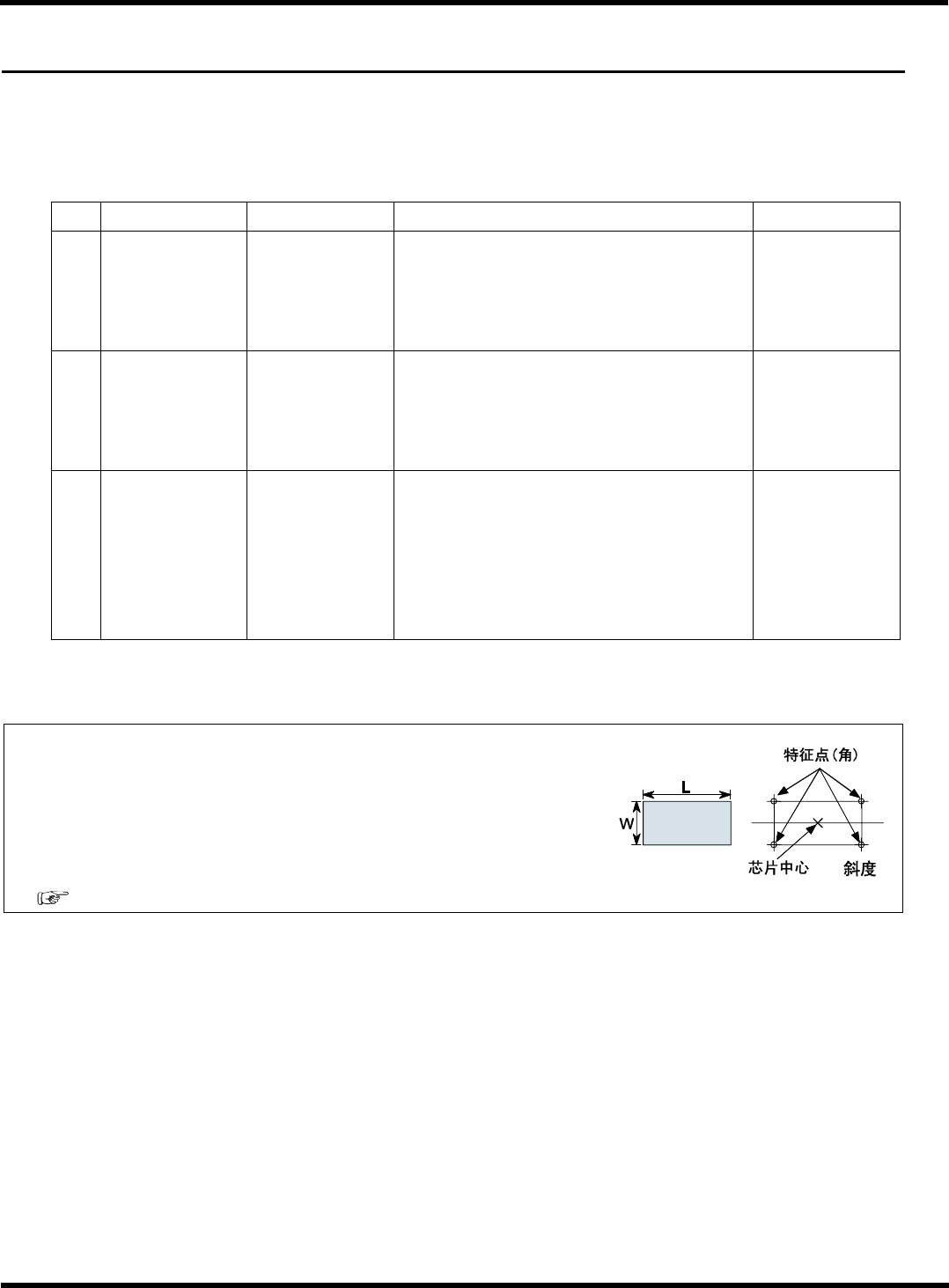
1)
根据部品形状固有的特征点
(
角、引线等
)
进行识别。
右图表示方形形状
(
四方形芯片
)
的固有特征点,根据
4
点
(
或者
3
点
)
的
信息求出芯片中心、斜度。
2)
根据芯片数据的
L (
长度
)
、
W (
宽度
)
、
P (
间距
)
等可以判定是否为合格
产品。
判断标准依据参考不同而不同。
(
附录
1.3
各种形状输入数据项目
)
HGR14-001C
图
1-1
轮廓识别的特征
HGR40-C-PMB01-A01-00
HGR40
附录
1.1
识别方式概要
附录
1-3
附录
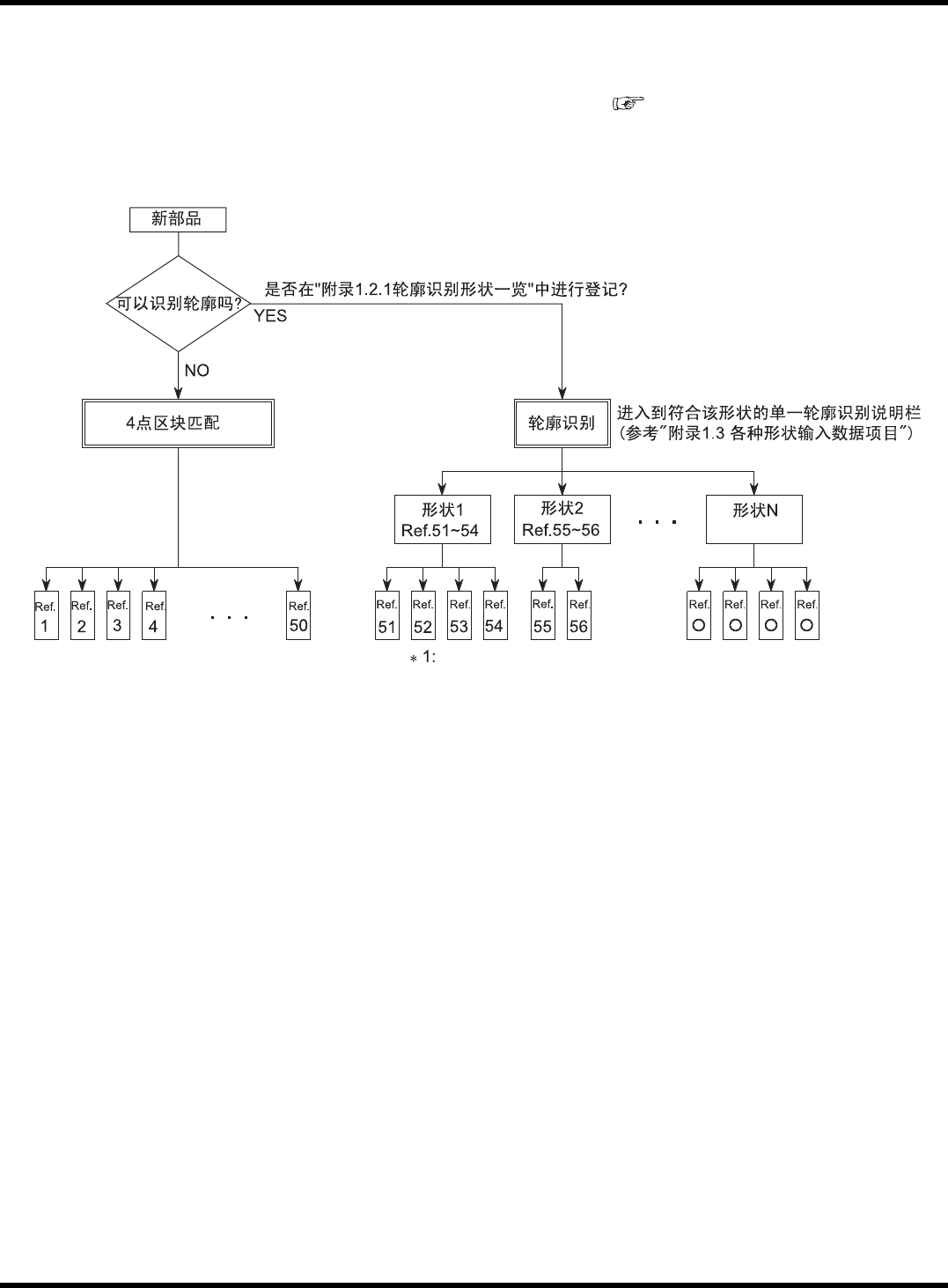
1.1.2
新部品的参考选择步骤
编制新部品的数据时,首先调查是否可以进行轮廓识别
(
附录
1.2.1
轮廓识别形状一览
)
,在
不能识别时请利用区块匹配。
∗
1:
1
个形状有多个参考编号
(Ref)
,但没有识别算法上的不同。
即使尺寸不同时,通常也可以设为同一参考编号
(Ref )
。
HGR40-C-PMB01-A01-00
HGR14-002C