JUKYX-193-1100_G5S2.pdf - 第88页
193-1 100 JUKYX 1-38 基板認識カメラによって基板上に設けられた基板認識マークが検出され、 認識マークの座標データとの位置ズレの量が算出されて、部品装着位置が 補正されます。 基 板 基板認識カメラ 基板認識マーク F1A33 フィーダベースの上にセットされているテープフィーダが、部品を供給位 置に送り出します。 装着ヘッドは、XY ビームによって X …
193-1100
JUKYX
1-37
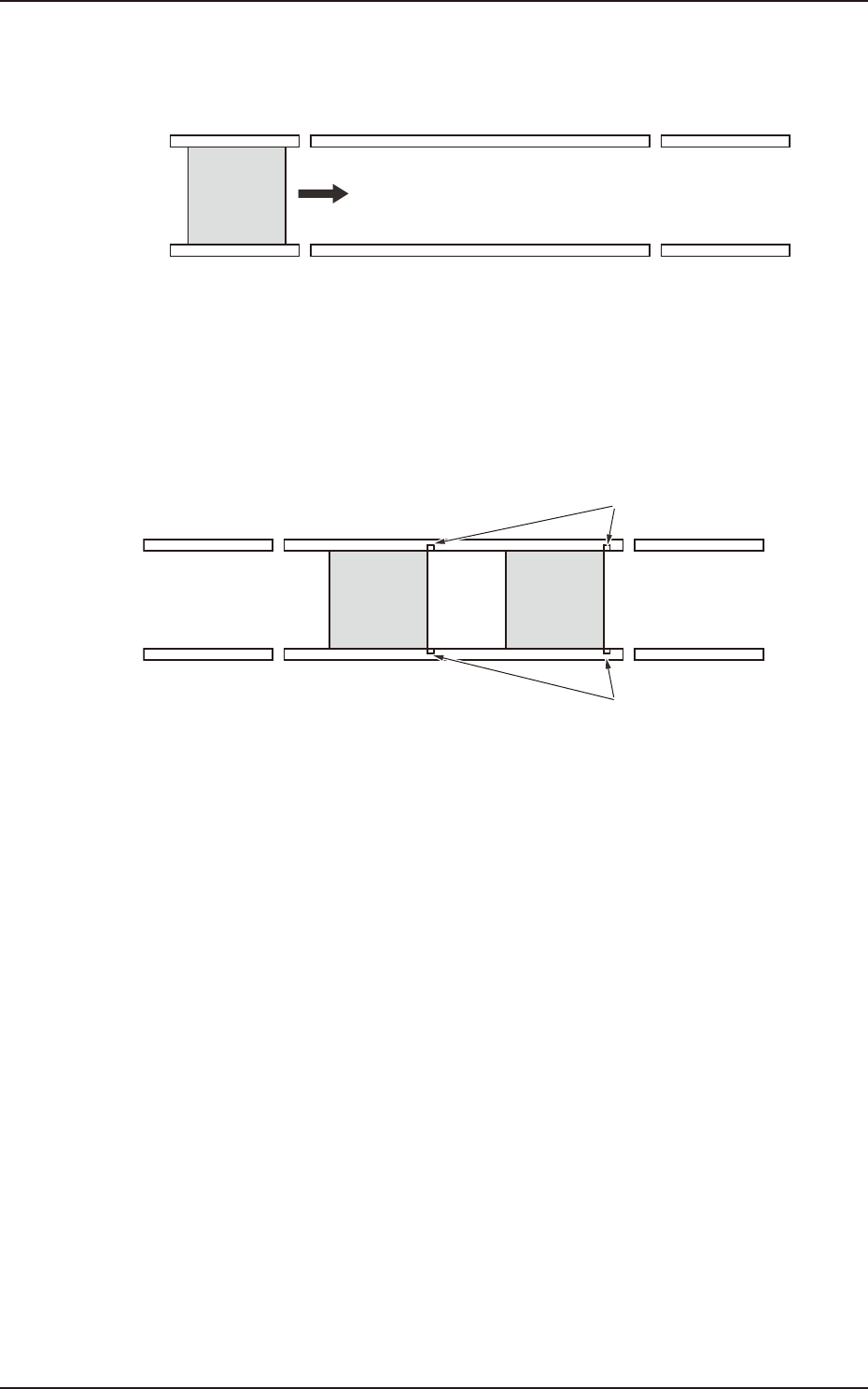
前工程装置から流れてきた基板は基板位置決め部まで送られます。
基 板
基板位置決め L 部 基板位置決め R 部基板供給部 基板排出部
F1A31
基板は、基板位置決め部の搬送基板検出センサで検知され、位置決めされ
ます。
基 板 基 板
基板位置決め L 部 基板位置決め R 部
基板供給部 基板排出部
基板検出センサファイバー
基板検出センサファイバー
F1A32A
193-1100
JUKYX
1-38
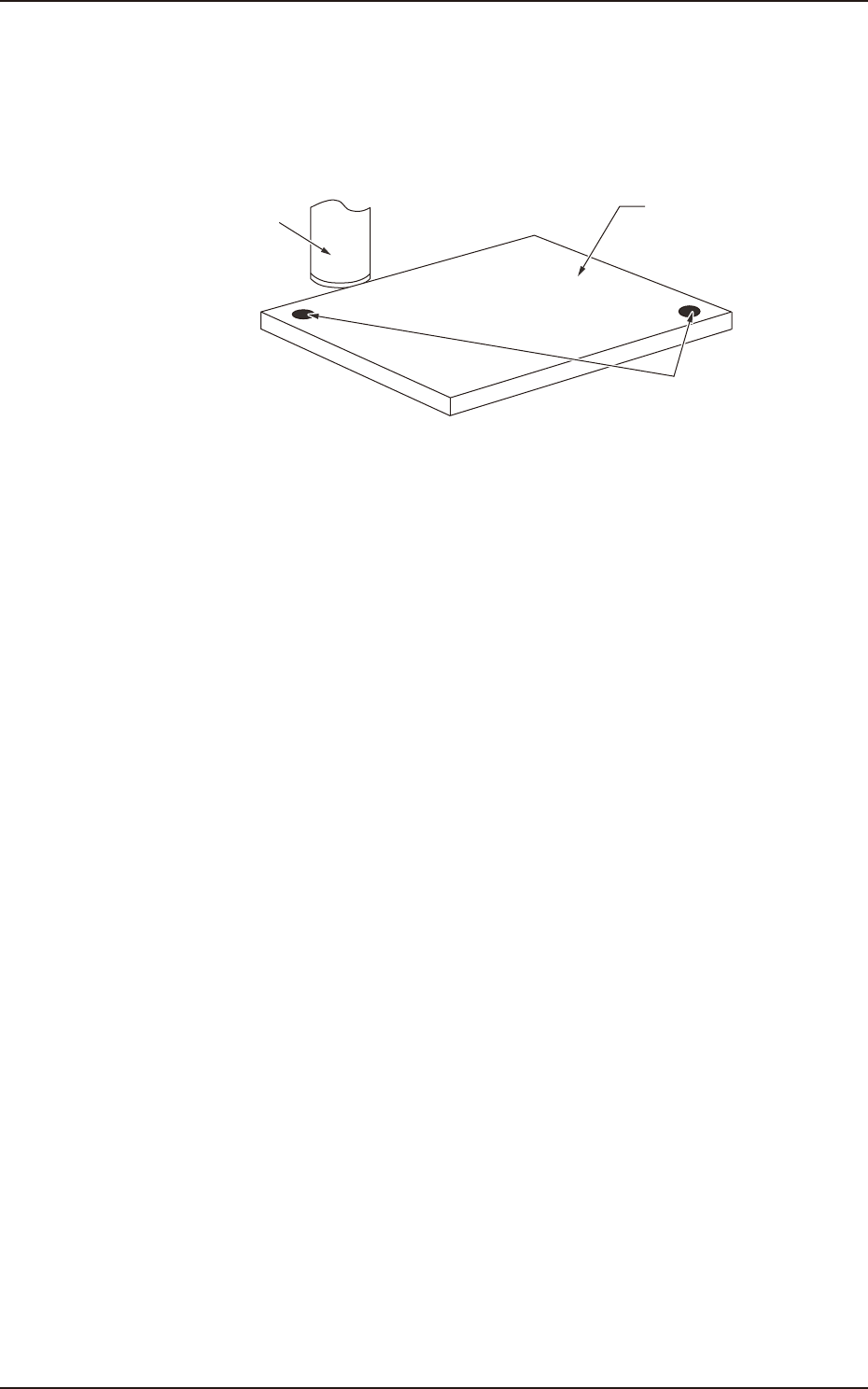
基板認識カメラによって基板上に設けられた基板認識マークが検出され、
認識マークの座標データとの位置ズレの量が算出されて、部品装着位置が
補正されます。
基 板
基板認識カメラ
基板認識マーク
F1A33
フィーダベースの上にセットされているテープフィーダが、部品を供給位
置に送り出します。
装着ヘッドは、XY ビームによって X 方向および Y 方向へ移動し、吸着ノ
ズルの着脱、部品の吸着、基板への部品装着などを行います。
装着ヘッドに取付けられている吸着ノズルで部品を吸着します。
193-1100
JUKYX
1-39
各装着ヘッドにはサイドビューカメラが配備されており、吸着部品の有
無、立ち、厚み計測が行われます。
部品認識カメラによって、吸着ノズルに吸着されている部品の認識画像が
取込まれ、検査されます。
部品認識カメラによる部品認識には、照明方式の違いにより反射認識方式
と透過認識方式(オプション)があり、部品ライブラリで設定した照明方
式に自動的に切替えられます。
部品認識では以下の 3 つの処理を行います。
•
部品の有無検出
すべての部品が対象です。
•
部品の検査
部品ライブラリにしたがって各検査が行われます。
•
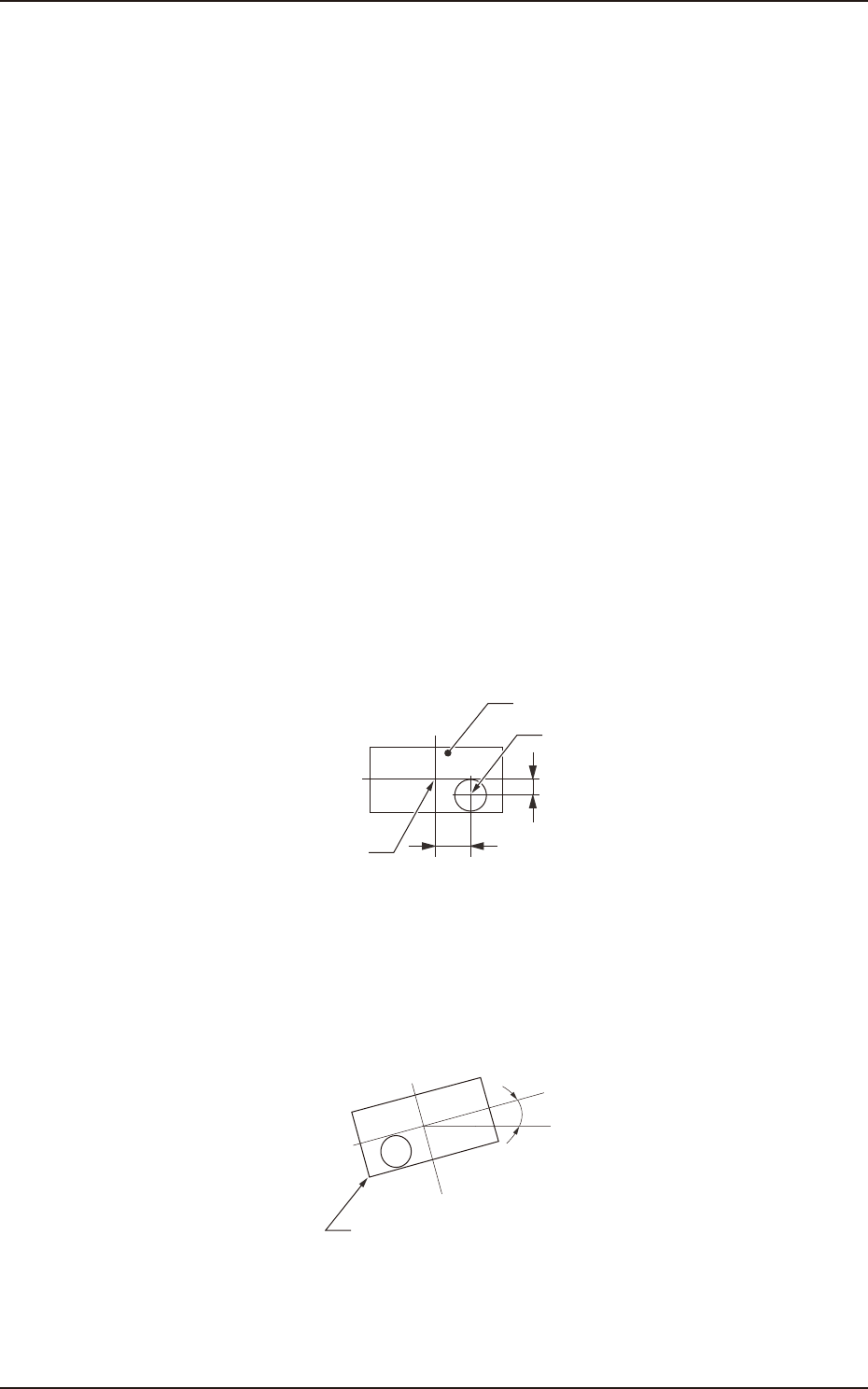
部品の位置ズレおよび角度ズレの測定
部品認識カメラ中心と部品中心との間の位置ズレ (X、Y) および角度
ズレ ( θ ) が測定されます。
吸着ノズルの部品吸着状態
部品
部品の中心
ノズル
F1A34
装着ヘッドを回転させ、部品をパターンプログラムで指定された装着角度
( 装着方向 ) に設定します。
このとき、部品認識によって得られた角度ズレ ( θ ) も補正します。
部品
θ
F1A35