JUKYX-193-1100_G5S2.pdf - 第91页
193-1 100 JUKYX 1-41 基板に通常 2 か所の基板認識マークを設け、基板認識カメラで認識マーク の座標データとの位置ズレの量を検出し、部品の装着位置を自動的に補正 する機能です。 基板全体の補正を行う“全体認識”と、繰返しパターンごとに補正を行う “割り認識”と、部品装着点個々に補正を行う“個々認識”があります。 ノート (a) 基板の外形寸法のバラツキなどにより…
193-1100
JUKYX
1-40
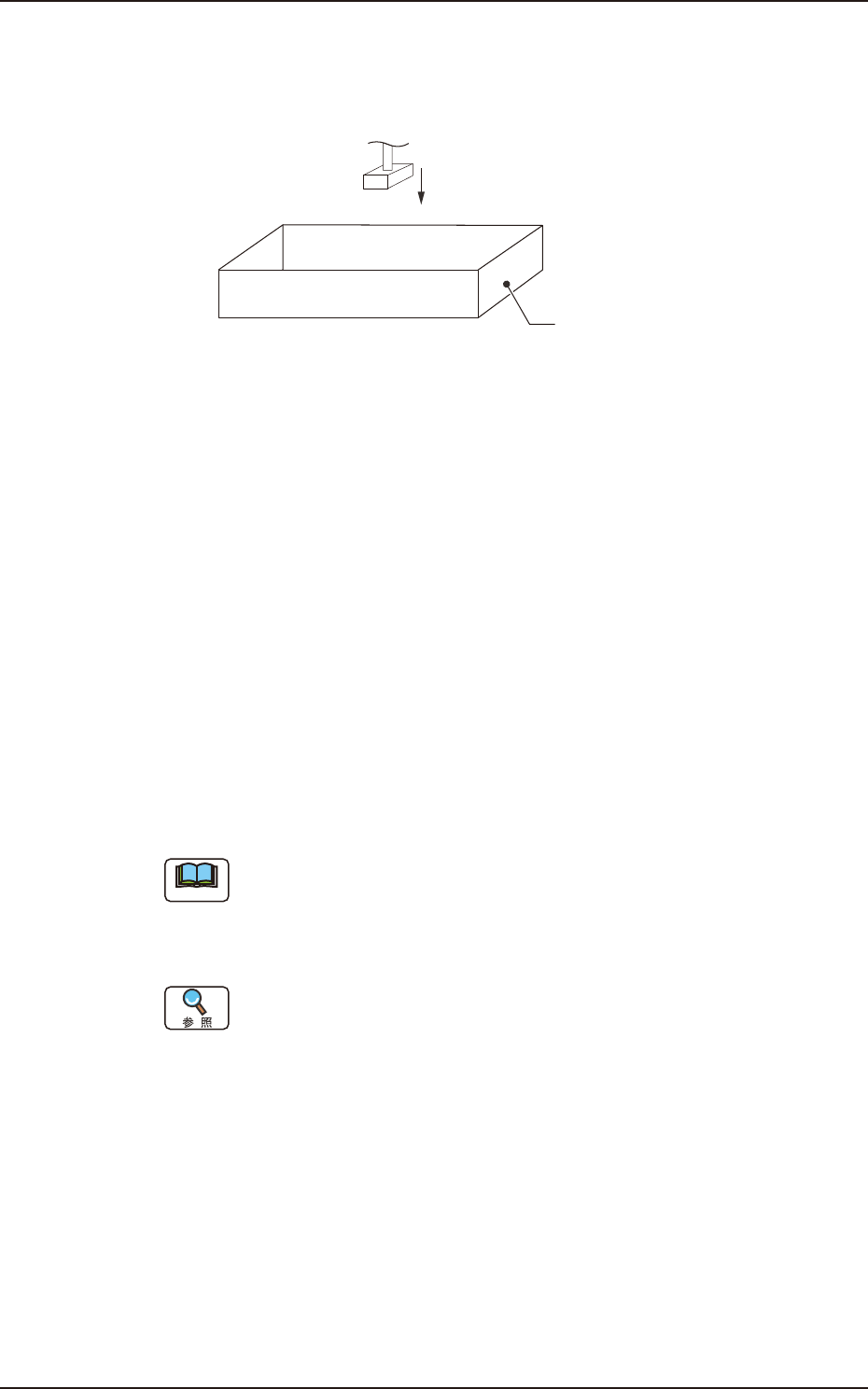
部品認識処理で認識異常となった場合、装着ヘッドが部品排出箱上へ移動
し、部品を排出します。
部品排出箱
F1A36
装着ヘッドは、基板位置決め部で待機している基板のパターンプログラム
で指定された装着座標上へ移動します。
このとき、部品認識によって測定された吸着位置ズレ (X、Y) を補正します。
吸着ノズルの最下限が部品ライブラリデータに基づいて制御されます。
電磁バルブが閉じ、吸着ノズルに吸着されている部品を基板上に装着しま
す。
前後のビームは一方が部品を装着し、もう一方が吸着する動作を交互に繰
り返し、両ビームが効率的に実装しつづけます。
部品装着済みの基板は、バッファから後工程へ送られます。
ノート
後工程の排出方式を標準以外で使用し、後工程の基板搬送速度が遅い場
合には、搬送速度を後工程側に合せてください。
“前後工程モード”タブシートの“後工程設定の搬送速度 ( 初期値 :
300[mm/ 秒 ])”を後工程側に合せてください。
詳細については、“3 巻 2 章 3.2. 前後工程モード設定”を参照してくだ
さい。

193-1100
JUKYX
1-41
基板に通常 2 か所の基板認識マークを設け、基板認識カメラで認識マーク
の座標データとの位置ズレの量を検出し、部品の装着位置を自動的に補正
する機能です。
基板全体の補正を行う“全体認識”と、繰返しパターンごとに補正を行う
“割り認識”と、部品装着点個々に補正を行う“個々認識”があります。
ノート
(a) 基板の外形寸法のバラツキなどにより、基板位置決め部上への機械的
な位置決め精度にバラツキが生じた場合に、基板認識機能が有効とな
ります。
(b) 基板認識マークは、装着パターンの位置を判断するための目印です。
そのため、認識マークと装着パターンの位置関係は一定であることが
必要です。一定でないと、装着精度は向上しません。
吸着ノズルが部品を吸着するときに、正しい吸着位置からずれた場合で
も、認識機能によって位置補正し、正しく装着するための機能です。
その際の補正量を吸着位置にフィードバックすることにより、吸着位置を
正規の吸着位置に近づけることができます。
テープフィーダを抜き差しした際に自動的にフィーダの位置を認識し、吸
着位置へのフィードバックをすることにより吸着位置を正規の吸着位置
に近づけることができます。

193-1100
JUKYX
1-42
使用量の多い品種のスペアのフィーダを準備しておき、部品切れ発生時に
順次スペアのフィーダへオルタネートしていく機能です。
部品補給のインターバルを長くでき、また部品補給のまとめ替えができま
す。
部品切れなどを検出したときは、装置を即停止させず、装置情報を報知し
て部品補給を促す機能です。
部品切れなどを検出していない他の部品は継続して装着し、すべて装着後
に基板を排出せず停止します。
短い時間間隔で異なるフィーダの部品切れなどを検出するような場合に、
ロスタイムを低減できます。
部品の残数を管理し、部品切れの前に予告を表示する機能です。
部品切れの前に部品補給の準備を行うことにより、ロスタイムを低減でき
ます。
テープフィーダのテーピング部品終端に新しいテーピング部品を連結し、
部品を補給する機能です。
生産運転の停止時間を低減できます。
テーピング部品の連結を行うためにはスプライシングテープおよびテー
プカット治具が必要です。