DECAN_L2_Admin(Chi_Ver6.4).pdf - 第385页
14-15 Machine Calibration < 软件限制 > 领域 <X-Y 坐标限制自动的查找 ...> 按钮 自动查找 XY 轴的 limit 后, 确认 是否运用变更值。 < 弯度补偿 > 按钮 选择 Y 轴时被 激活。 执行 S kew Compensation 时使 用。 详细的事项请参考 “ 13.3.2 歪斜修正 “ < 校准原位 > 按钮 自动查找和…

14-14
Advanced Multi-Functional Placer DECAN L2 Administrator’s Guide
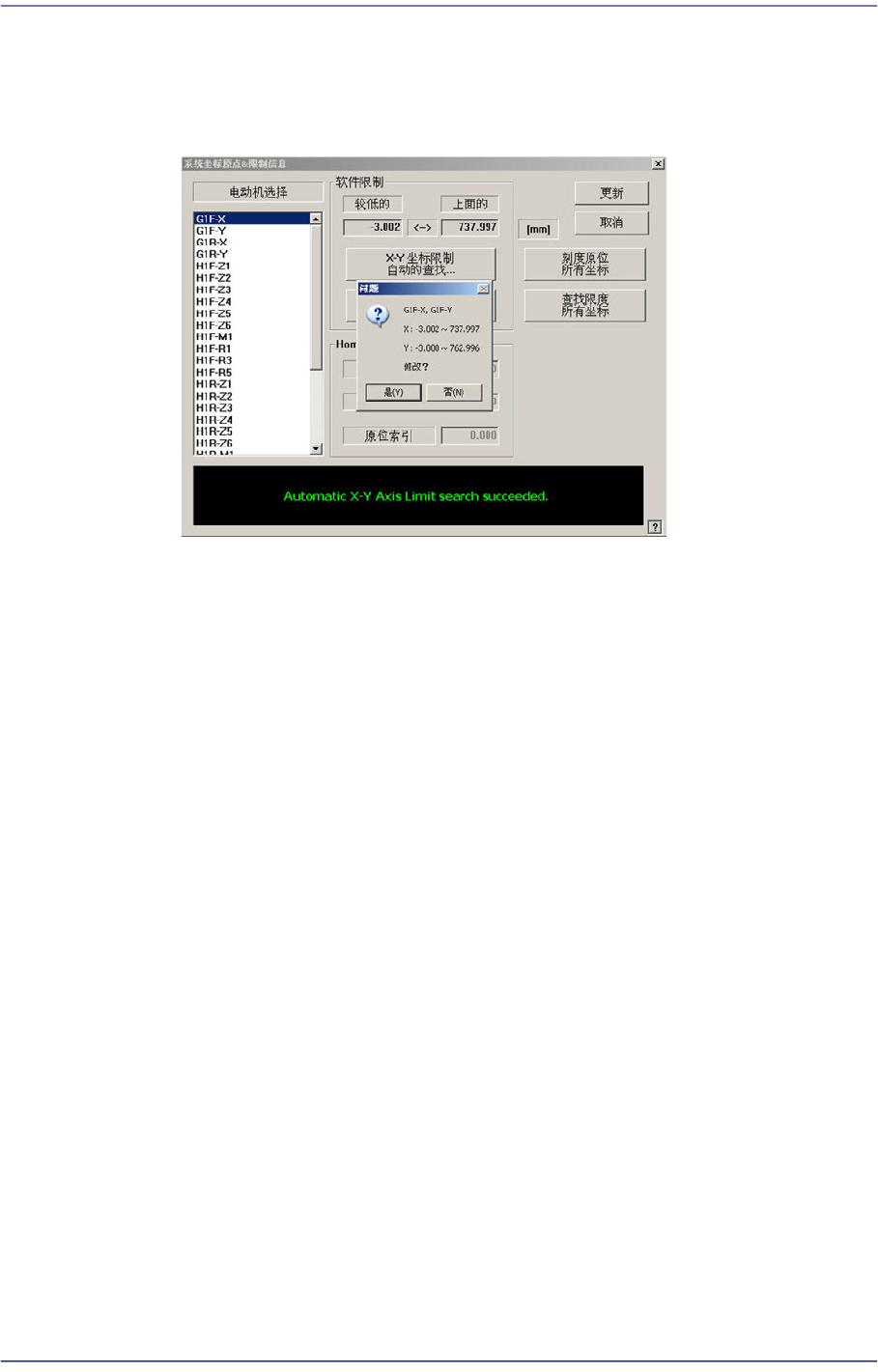
G1F-X: 前面 Gantry的 X轴
G1F-Y: 前面 Gantry的 Y轴
G1R-X: 后面 Gantry的 X轴
G1R-Y: 后面 Gantry的 Y轴
H1F-Z1: 前面 Gantry的 Head 1的 Z轴
H1F-Z2: 前面 Gantry的 Head 2的 Z轴
H1F-Z3: 前面 Gantry的 Head 3的 Z轴
H1F-Z4: 前面 Gantry的 Head 4的 Z轴
H1F-Z5: 前面 Gantry的 Head 5的 Z轴
H1F-Z6: 前面 Gantry的 Head 6的 Z轴
H1F-M1: 前面Gantry的Mirror轴
H1F-R1: 前面 Gantry的 Theta 轴 (H1, H2)
H1F-R3: 前面 Gantry的 Theta 轴 (H3, H4)
H1F-R5: 前面 Gantry
的 Theta 轴
(H5, H6)
H1R-Z1: 后面 Gantry的 Head 1的 Z轴
H1R-Z2: 后面 Gantry的 Head 2的 Z轴
H1R-Z3: 后面 Gantry的 Head 3的 Z轴
H1R-Z4: 后面 Gantry的 Head 4的 Z轴
H1R-Z5: 后面 Gantry的 Head 5的 Z轴
H1R-Z6: 后面 Gantry的 Head 6的 Z轴
H1R-M1: 后面 Gantry的 Mirror轴
H1R-R1: 后面 Gantry的 Theta 轴 (H7, H8)
H1R-R3: 后面 Gantry的 Theta 轴 (H19, H10)
H1R-R5: 后面 Gantry的 Theta 轴 (H111, H12)
STEF-S: Entry Shuttle的移动马达
STEF-W: Entry Shuttle的conveyer宽度调节马达
ST1F-W:前面作业conveyer(F2)的宽度调节马达
ST1R-
W: 后面作业c
onveyer(R2)的宽度调节马达
STXF-S: Exit Shuttle的移动马达
STXF-W: Exit Shuttle的conveyer宽度调节马达
14-15
Machine Calibration
<软件限制> 领域
<X-Y 坐标限制自动的查找...> 按钮
自动查找XY轴的limit后,确认是否运用变更值。
<弯度补偿> 按钮
选择Y轴时被激活。执行Skew Compensation时使用。详细的事项请参考 “13.3.2
歪斜修正
“
<校准原位> 按钮
自动查找和反应<电动机选择>目录框中选定的马达home位置。
<刻度原位所有坐标> 按钮
自动查找所有轴home位置并反应。
<查找限度所有坐标> 按钮
寻找所有轴的极限值。
<Home Info.> 领域
选择Mirror轴时,<Home Offset>编辑框被激活。对 Mirror轴进行校正时使用。
<更新> 按钮
适用变更值。
<关闭> 按钮
关闭对话框。
14-16
Advanced Multi-Functional Placer DECAN L2 Administrator’s Guide
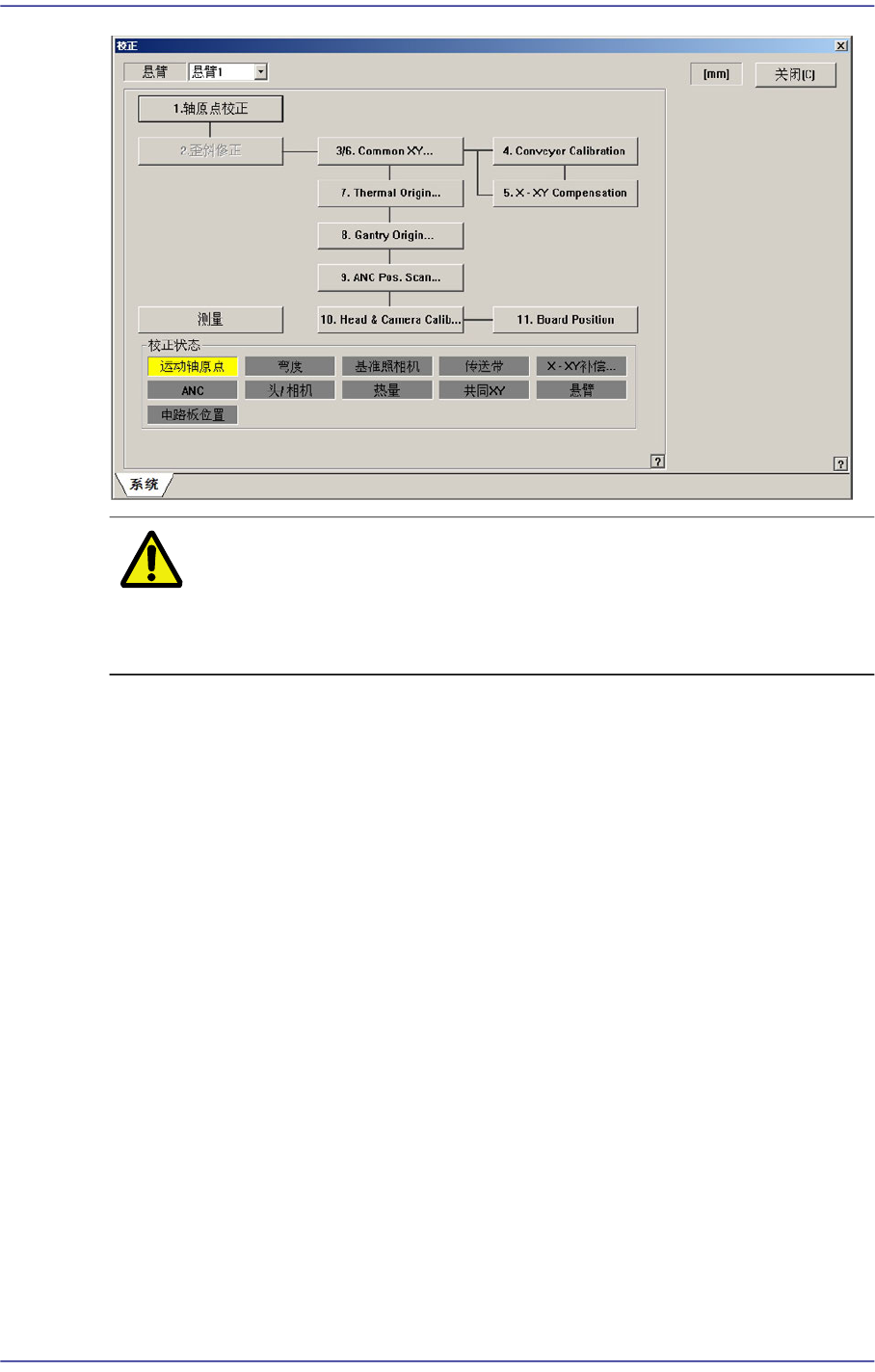
注 意 重新校准后,原点位置会改变。如果不重新示教拾取位置、ANC
及贴装原点等与设备位置有关的项目,将导致设备动作异常。
从新校准后,必须重新示教与位置有关的项目。