DECAN_L2_Admin(Chi_Ver6.4).pdf - 第95页
4-17 Tools 简化操作 (shortcut) 菜单 侧的 <Not Busy> 按钮。 DI-A va ilable (Pre) 从以前设备接受已完成发送 PCB 准备的信 号。 DI-Not Busy (Next) 从以后设备接受已完成接受 PCB 准备的信 号。 DO-A v a ilable (Next) 向以后设备发送已完成传送 PCB 准备的信 号。 手动发送信号时请点击右 侧的 <A v…
4-16
Advanced Multi-Functional Placer DECAN L2 Administrator’s Guide
图
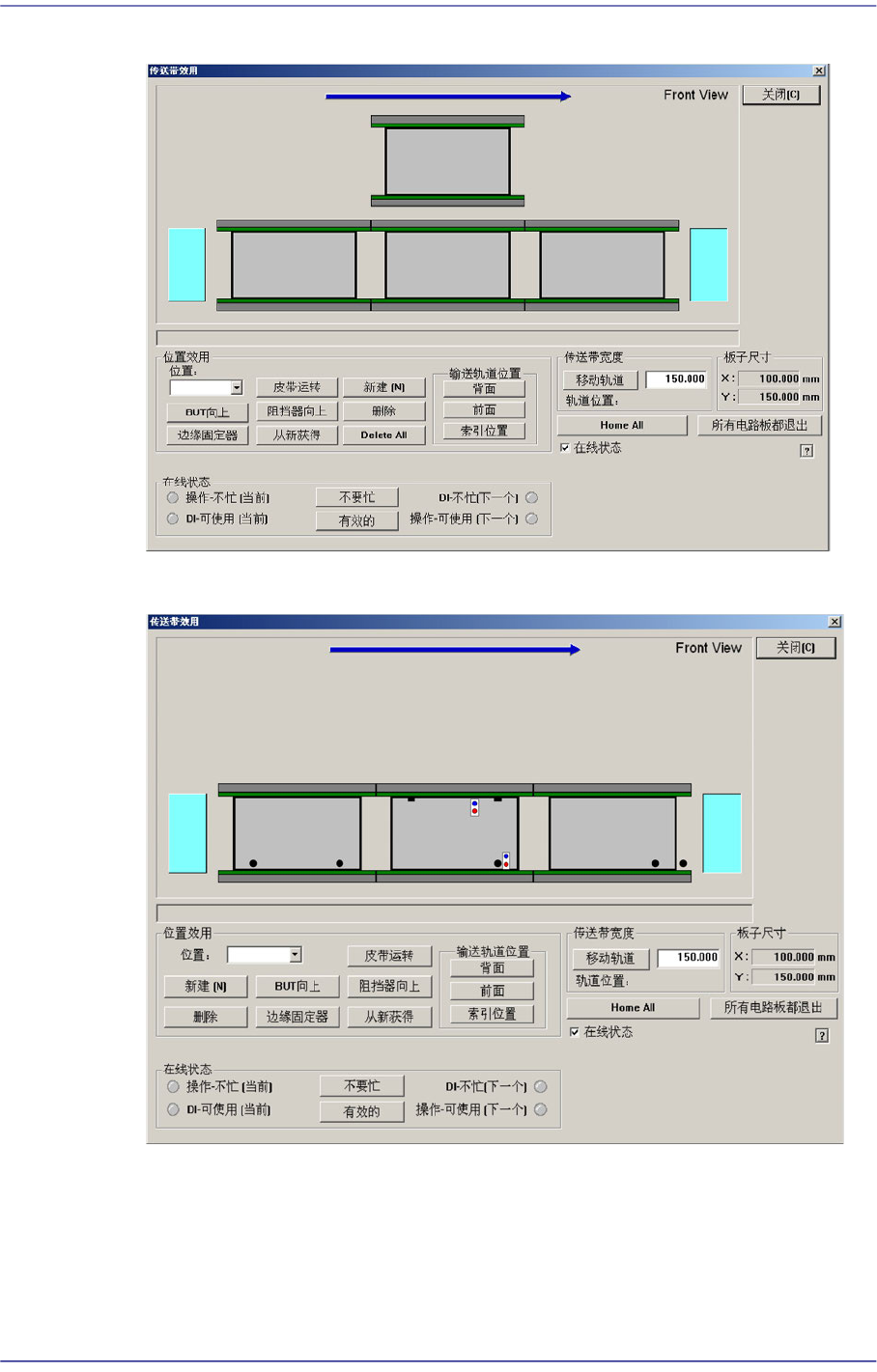
4.7 “Conveyor System-Inline Status”
对话框
图
4.8 Single Conveyor (Option)
<在线状态> 领域
可手动操作SMEMA有关Output,并显示 Input状态。 (亮灯-On, 灭灯-Off)
DO-Not Busy (Pre.)
向以前设备发送已完成接受PCB准备的信号。 手动发送信号时请点击右

4-17
Tools
简化操作
(shortcut)
菜单
侧的 <Not Busy> 按钮。
DI-Available (Pre)
从以前设备接受已完成发送PCB准备的信号。
DI-Not Busy (Next)
从以后设备接受已完成接受PCB准备的信号。
DO-Available (Next)
向以后设备发送已完成传送PCB准备的信号。手动发送信号时请点击右
侧的<Available>按钮。
4-18
Advanced Multi-Functional Placer DECAN L2 Administrator’s Guide
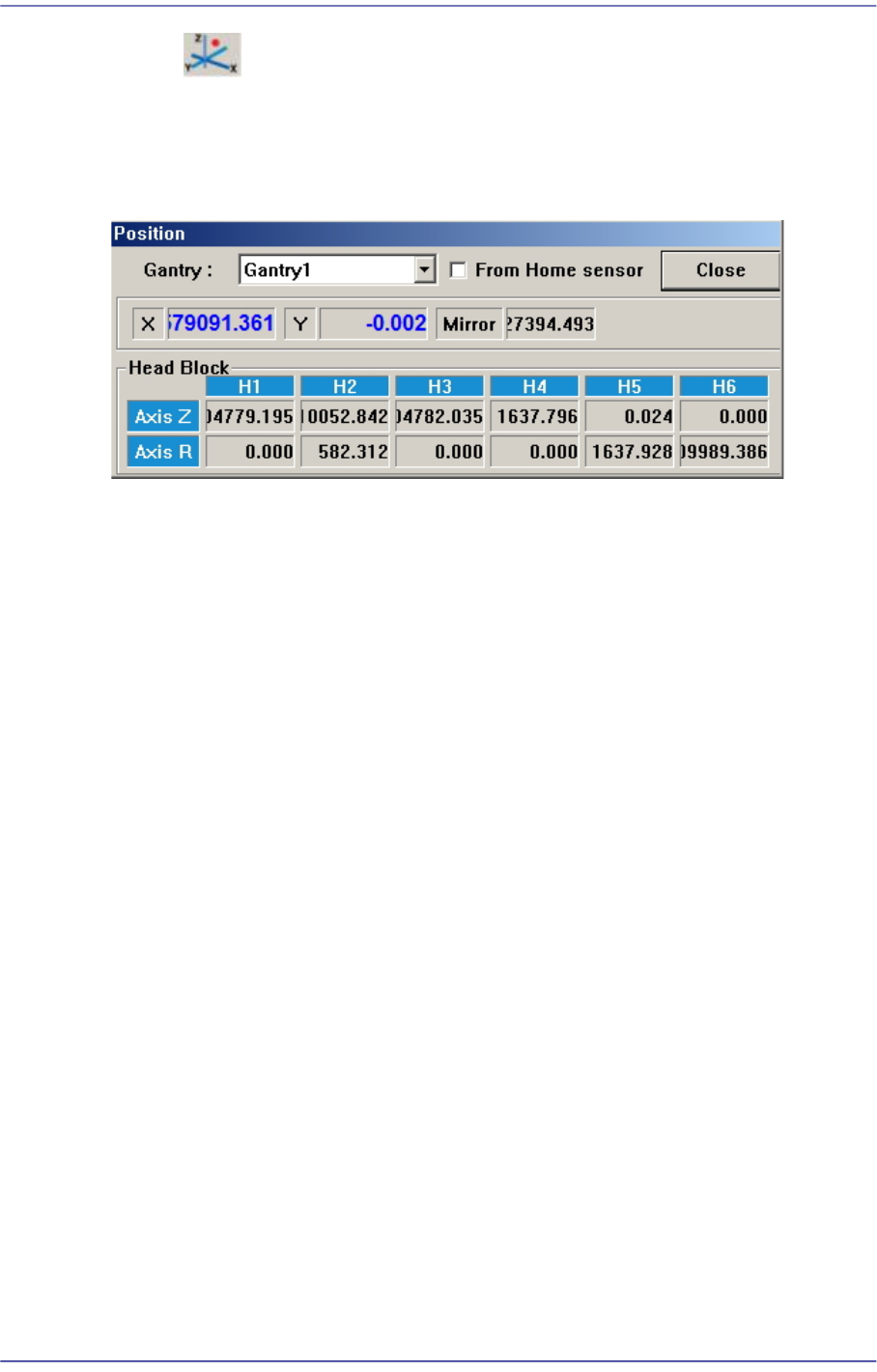
4.6. 当前位置
主要在示教或校正时有必要参考各驱动轴的当前坐标时使用。 选择该命令时,在
MMI基本画面上显示如下的对话框。
图
4.9 “
位置
”
信息框
<双悬臂> 组合框
选择想要确认坐标的Gantry。
<从原点感应器> 选择框
用于确认磁头的吸嘴末端从Z轴home sensor位置下降多少。
坐标
X
表示以原点为准时,头1在 X方向的当前坐标值。
Y
表示以原点为准时,头1在 Y方向的当前坐标值。
镜子
表示从飞行相机用 Mirror旋转轴的home 位置旋转的当前角度。
<HEAD部分> 领域
Head 1/Axis Z
表示尚未选择<从原点感应器>选择框时,从PCB顶面到磁头1吸嘴末端的
高度。
Head 1/Axis R
表示从磁头1的Theta轴home位置旋转的当前角度。
Head 2/Axis Z
表示尚未选择<从原点感应器>选择框时,从PCB顶面到磁头2吸嘴末端的
高度。
Head 2/Axis R