3. SM411F_Administrators_Guide(Kor_Ver5).pdf - 第167页
7-15 부품 등록 부품을 버릴 때 , Head 가 하강을 완료하여 정지한 때부터 상승을 시작할 때까지 의 시간입니다 . <Dump V ac Off> 에디트박스 부품을 버릴 때 , Head 가 하강을 완료하여 정지한 때부터 Va c u u m 을 Off 할 때까 지의 시간입니다 . <Dump Blow On> 에디트박스 부품을 버릴 때 , 헤드가 하강을 완료하여…
7-14
Samsung Component Placer SM411F/411FN Administrator
’
s Guide
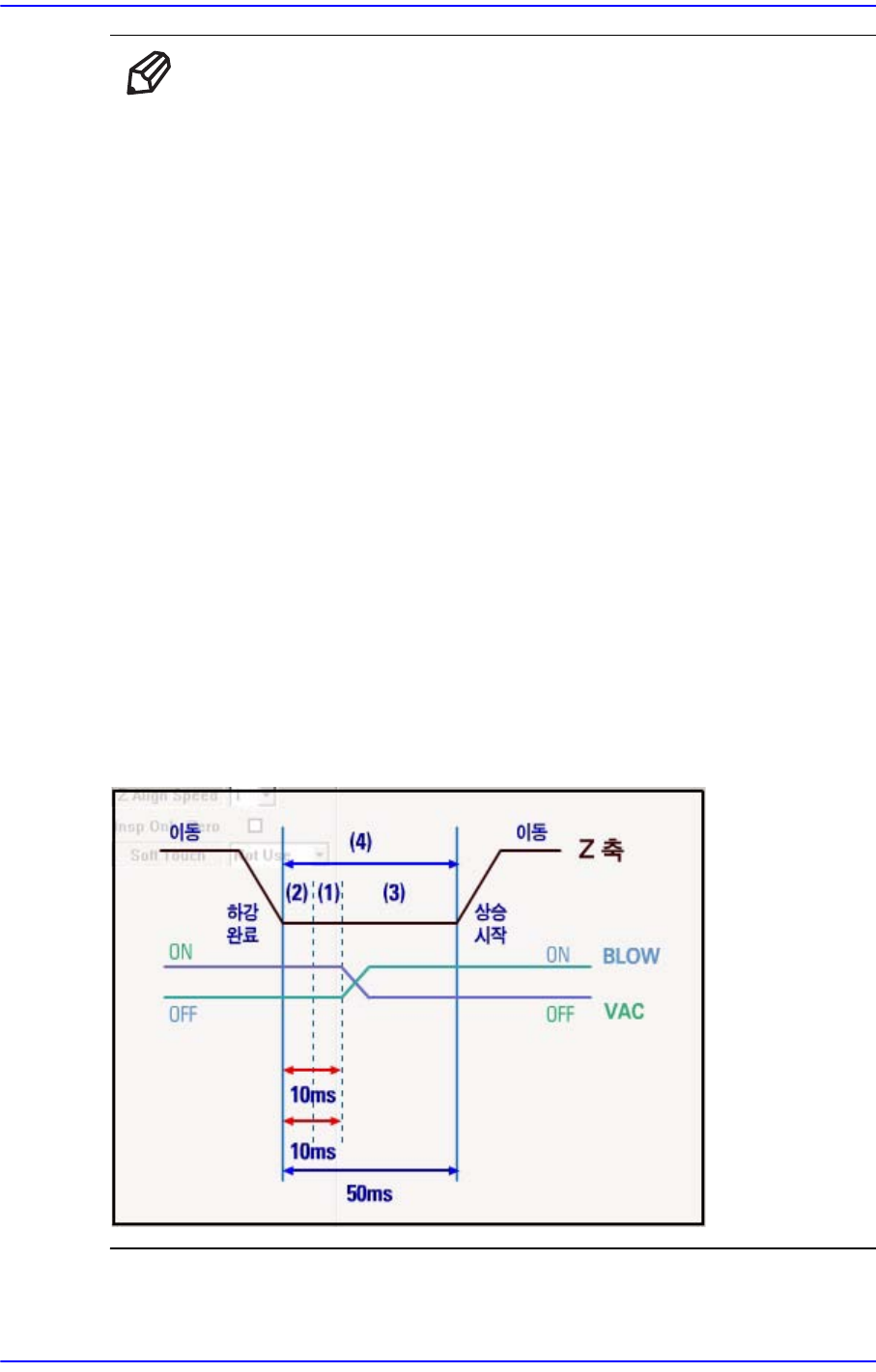
메 모 Fine Pitch용 QFP의 경우
부품을 장착하기 위해서 Z축을 고속으로 하강 할 경우, PCB와
물리적으로 부딪칠 수도 있습니다.
또한, 이러한 충격이 PCB의 미세한 흔들림과 솔더페이스트의
뭉게짐 등의 요인이 될 수 있습니다. 이러한 상황에서 부품을 장
착한다는 것은 장착정도를 떨어뜨리는 요인으로 작용될 수도 있
습니다.
Vac off 지연 시간을 조정함으로서 이러한 상황을 방지할 수 있습
니다. 즉, 각종 외부 요인이 안
정화가 될 때까지 부품을 진공압으
로 움켜잡고 있다가 외부 요인이 소멸된 뒤, 진공압을 OFF하여
문제를 예방하는 방법입니다.
Vac off 지연 시간은 다음 그림의 (1)항에 해당됩니다 .
일반적인 Pitch의 부품이라면 (1)항의 시간은 고려하지 않더라도
장착정도에는 크게 영향이 없습니다.
그러나, Fine Pitch부품을 장착하는 경우 또는 위 에서 지적된 문
제가 발생될 만한 부품이라면, (1)항의 시간
을 작게 설정하는 것
도 좋은 결과를 얻을 수 있습니다.
Vac off 지연 시간을 설정 할 경우, 전체 지연시간인 (4)항에 비해
약 20~30%정도로 설정하는 것이 보편적입니다. 중요한 사항이
므로 꼭 기억해 두시기 바랍니다.
<Dump> 에디트박스

7-15
부품
등록
부품을 버릴 때, Head가 하강을 완료하여 정지한 때부터 상승을 시작할 때까지
의 시간입니다.
<Dump Vac Off> 에디트박스
부품을 버릴 때, Head가 하강을 완료하여 정지한 때부터Vacuu m 을 Off할 때까
지의 시간입니다.
<Dump Blow On> 에디트박스
부품을 버릴 때, 헤드가 하강을 완료하여 정지하고 난 뒤, Vacuum을 Off 했을 때
부터 Blow On 할 때까지의 시간
단위 : msec (10 msec 단위 간격으로 설정가능)
<Speed> 영역
흡착(Pickup), 장착(Place), 부품
버림(Dump)작업을 할 때, 구동모터의 구동속도
를 설정합니다.
속도는 노즐의 종류, 부품의 무게, 부품의 흡착면적 등을 전체적으로 고려해서
해당 부품에 따라 적절하게 설정해야 합니다.
구동속도는 다음과 같고, 각 구동속도에 관한 속도 Profile은 System에 Setting되
어 있습니다.
1- Fastest: 가장 빠른 속도입니다.
2- Fast: 빠른 속도입니다.
3- Middle: 중간 속도입니다.
4- Slow: 느린 속도입니다.
5- Slowest: 가장 느린 속도입니다.
<XY>
콤보박스
XY 축 구동모터의 구동속도를 선택합니다. 부품에 따라 속도가 적절하지 못 하
면, 빈번하게 실제 장착이 되지 않는 오류가 발생될 수 있습니다.
<Z Pick Down> 콤보박스
부품을 흡착하기 위해 Head를 하강할 때, Z 축 구동모터의 구동속도를 선택합니
다. 부품에 따라 속도가 적절하지 못 하면, 흡착시 부품이 튀어서 흡착에러를 유
발 할 수 있습니다.
필요에 따라 “Soft Touch” 기능을 함께 사용
할 수 있습니다.
<Z Pick Up> 콤보박스
부품을 흡착한 후, Head를 상승할 때, Z 축 구동모터의 구동속도를 선택합니다.
부품에 따라 속도가 적절하지 못 하면, 흡착된 부품이 노즐로부터 떨어져서 흡
착에러를 유발 할 수 있습니다 .
필요에 따라 “Soft Touch” 기능을 함께 사용할 수 있습니다.

7-16
Samsung Component Placer SM411F/411FN Administrator
’
s Guide
<R> 콤보박스
R 축 구동모터의 구동속도를 선택합니다. 부품에 따라 속도가 적절하지 못 하면
, 부품의 슬립현상이 발생해서 장착 각도가 틀어지거나 부품이 떨어질 수 있습
니다.
<Z Place Down> 콤보박스
부품을 장착하기 위해 Head를 하강할 때, Z축 구동모터의 구동속도를 선택합니
다. 부품에 따라 속도가 적절하지 못 하면, 부품에 크랙이 생기거나 이미 장착된
부품에 영향을 주어 문제를 발생시킬 수 있
습니다.
필요에 따라 “Soft Touch” 기능을 함께 사용할 수 있습니다.
<Z Place Up> 콤보박스
부품을 장착한 후, Head를 상승할 때, Z 축 구동모터의 구동속도를 선택합니다.
부품에 따라 속도가 적절하지 못 하면, 장착정도에 나쁜 영향을 줄 수 있습니다.
필요에 따라 “Soft Touch” 기능을 함께 사용할 수 있습니다.
<Z Align Speed> 콤보박스
픽스카메라에서 부품을 인식하기 위해 Z축을 내리고 올리는 속도 또는 플라
이
카메라가 부품을 인식하고 Z축 이동높이까지 이동하는 속도를 설정하는 항목
입니다.
<속도> 영역 및 <소프트 터치> 콤보박스에서 설정한 Z축 속도와는 별개로 적
용되며, 오직 부품 인식을 위한 Z축의 동작속도로 적용됩니다. 기존 장비에서는
위 두 동작시 Z Place Down/Up 동작의 속도를 참조하여 이동하였습니다.
따라서 정도를 위해 Z Place Down/Up 속도를 느리게 설정하는 경우, Z축 인식
높이까지 이
동하는 동작이나 인식 후 플라이카메라에서 Z축 이동높이까지 이
동하는 동작도 느려질 수 밖에 없었습니다.
이러한 단점을 극복하기 위해 위 두 동작의 속도를 지정하는 기능을 추가하게
된 것입니다.
Z축 하강 속도에 따른 흡착에러가 발생하기 쉬운 미소부품의 경우, 여기서 값을
변경하여 인식테스트를 실시하고 인식이 성공했을 때의 값을 설정하여 부품을
등록하십시오.
<Insp Only Zero> 체크박스
특정 부품의 경우, 부품
을 인식할 때, 부품이 노즐에 흡착된 방향에 따라 인식율
에 차이가 발생하는 경우가 있습니다.
이 때, 인식율이 좋은 방향을 기준으로 해당 부품을 등록하고 이 기능을 선택하
면, 해당 부품을 인식할 때 항상 등록된 각도로 부품을 인식합니다 . TR 이나 IC
부품에 주로 적용됩니다.
<Soft Touch>콤보박스