3. SM411F_Administrators_Guide(Kor_Ver5).pdf - 第177页
7-25 부품 등록 번 검사합니다 . Linear V : 커넥터 종류에 사용되며 , 세로 방향으로 위쪽과 아래쪽 면을 2 번 검사합니다 . <MFOV Length> 에디트박스 분할인식 이동거리를 입력합니다 . <EX Param> 버튼 인식과 관련된 세부설정을 하는 대화상자를 보여줍니다 . “ Extra Parameter “ 탭 화면 - IC Lead 부품 …
7-24
Samsung Component Placer SM411F/411FN Administrator
’
s Guide
상(Binary)으로 보여줍니다.
<Ignore Center Offset> 체크박스
Center Offset 이란, 부품의 중심으로부터 일정한 거리 이상 벗어나서 부품을
흡착했다면, 부품의 검색 결과에 관계없이 부품을 버리겠다는 의미입니다.
그러므로, Chip 부품인 경우, 이 기능을 선택하면 Vision 체크 시 Center
Offset 을 체크하지 않습니다.
즉, 검색 결과에 따라 장착을 하겠다는 의미입니다 . 만일, 이 기능을 선택하
지 않는다면, 설비는 부품의 크기대비 20% 이상 중심점에서 벗어나서 부품
이 흡착
된 경우, 부품을 버리게 됩니다.
부품을 버리는 이유는 부품의 중심이 심하게 벗어나 흡착하는 경우, 중심점
을 보정을 하고나서 보정된 양에 따라 부품이 움직이는 정도가 커져서 장착
정도가 떨어지기 때문입니다 .
Chip-rect, Chip-tantal, Chip-Aluminum, Melf 등에만 적용됩니다.
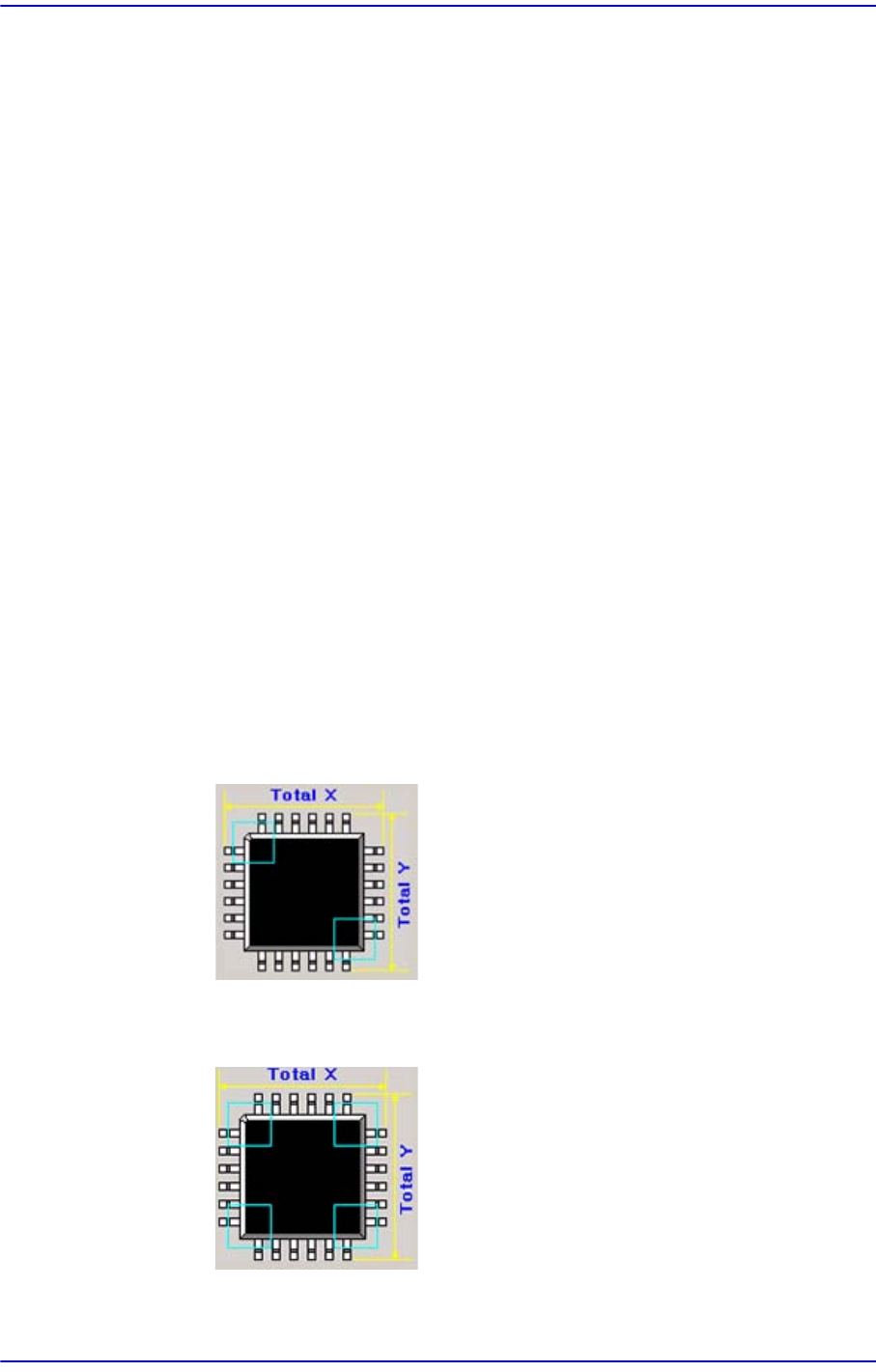
<MFOV Type> 콤보박스
분할인식 Type을 설정합니다. 이 기능은 <Camera No.> 콤보박스에서 Fix1
Cam ~ Fix2 Cam 선택시만 활성화 됩니다. SOP, SOP2, SOJ, SOJ2, QFP, PLCC,
UserIC 등에만 적용됩니다.
선택가능한 유형은 다음과 같습니다;
None : 분할인
식 Type을 사용하지 않습니다.
Cross 2P: QFP, PLCC 종류에 사용되며, Cross 방향으로 2번 검사합니다.
Cross 4P: QFP, PLCC 종류에 사용되며, Double Cross 방향으로 4번 검사
합니다.
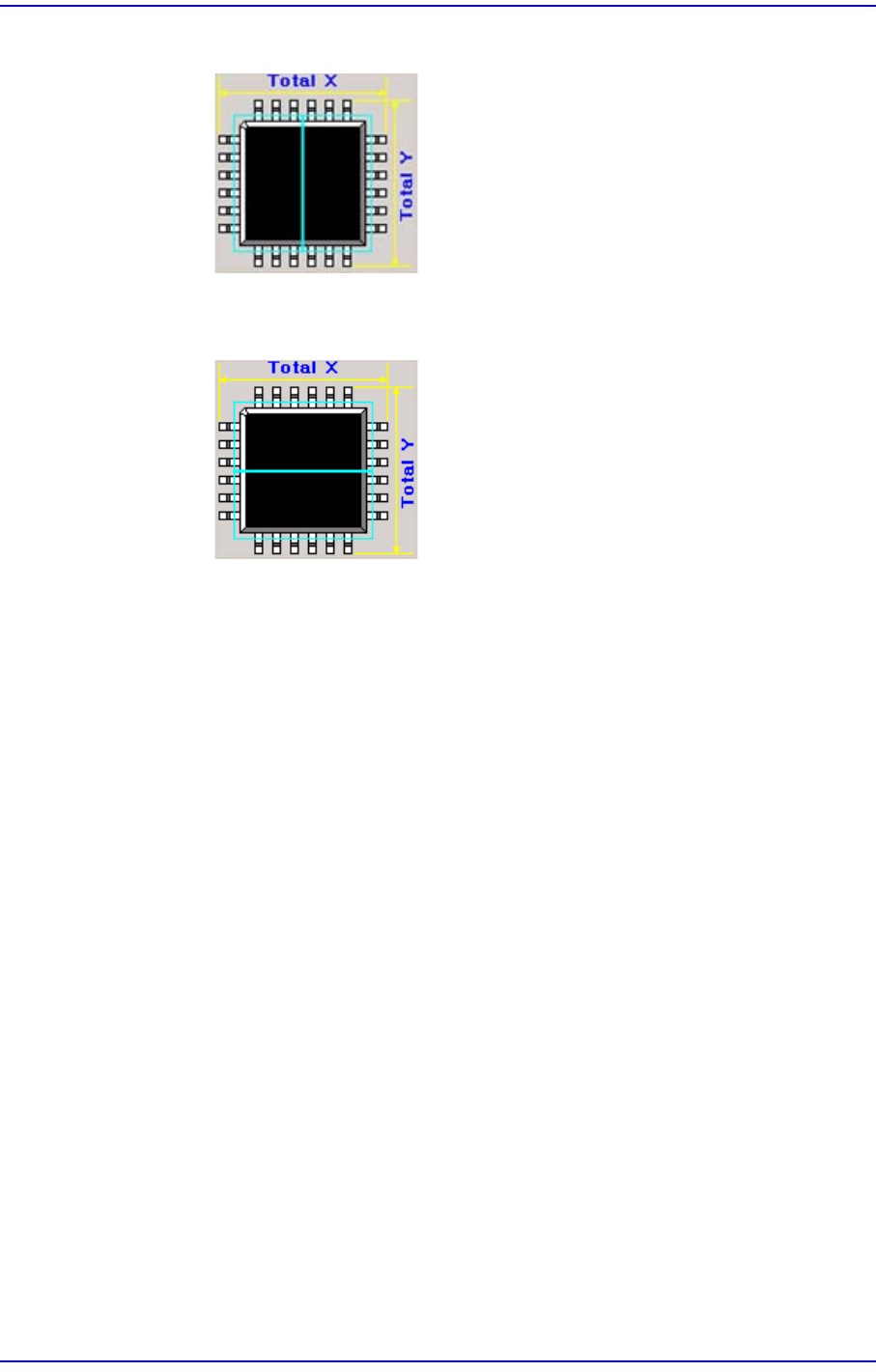
Linear H: 커넥터 종류에 사용되며, 가로 방향으로 외쪽과 오른쪽 면을 2
7-25
부품
등록
번 검사합니다.
Linear V: 커넥터 종류에 사용되며, 세로 방향으로 위쪽과 아래쪽 면을 2
번 검사합니다.
<MFOV Length> 에디트박스
분할인식 이동거리를 입력합니다.
<EX Param> 버튼
인식과 관련된 세부설정을 하는 대화상자를 보여줍니다.
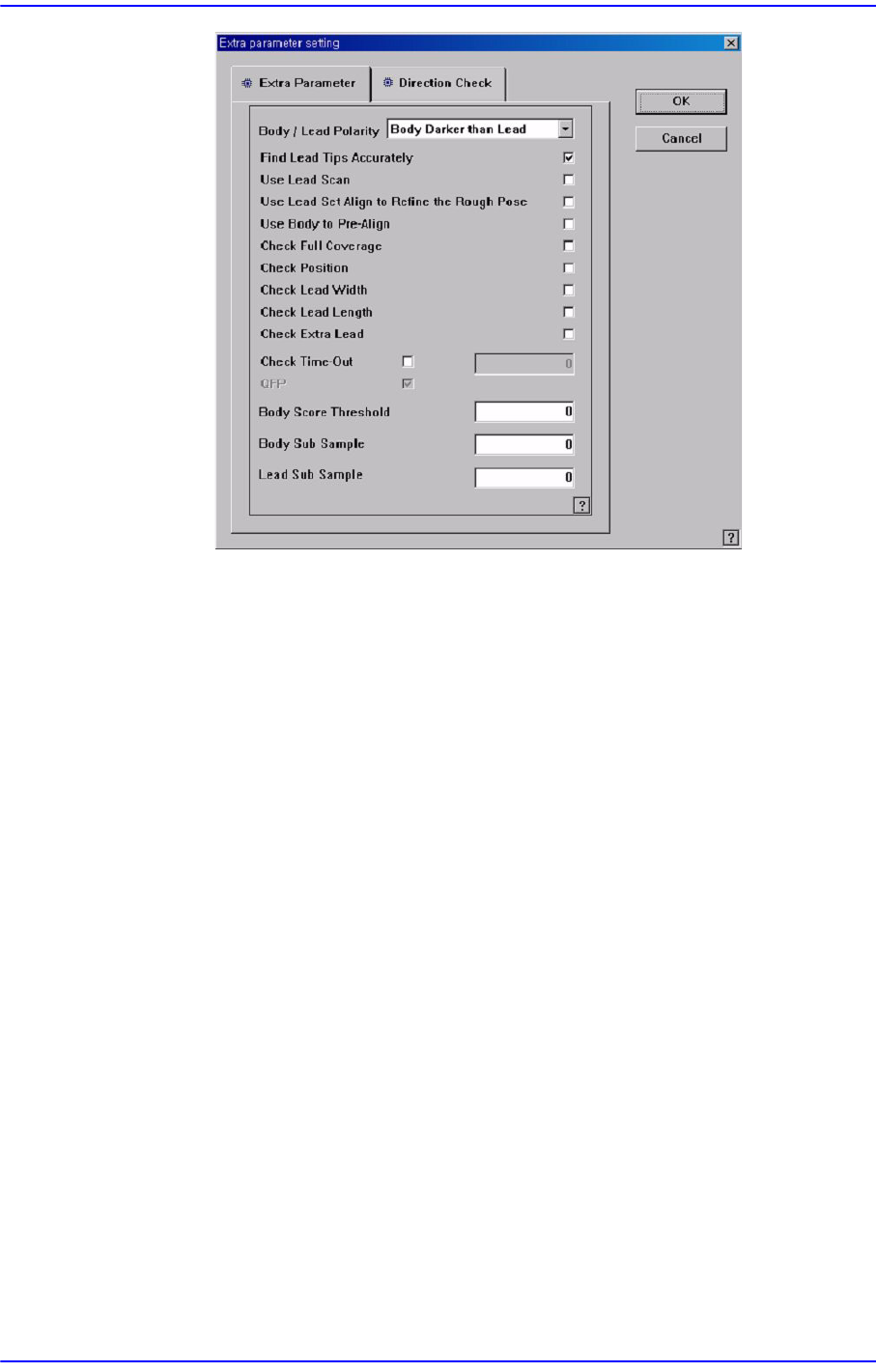
“ Extra Parameter “ 탭 화면 - IC Lead 부품
주로 SOP, SOP2, SOJ, SOJ2, QFP, PLCC, UserIC 등의 IC 부품의 인식과 관
련된 세부 파라메터들을 설정합니다.
7-26
Samsung Component Placer SM411F/411FN Administrator
’
s Guide
<Body/Lead Polarity> 콤보박스
Body와 Lead간의 밝기를 정합니다.
- Body darker than Lead : 리드보다 Body가 어두운 경우 선택합니다.
- Body lighter than Lead : 리드보다 Body가 밝거나 밝기가 비슷한 경
우 선택합니다.
<Find Lead Tips Accurately> 체크박스
리드 끝을 정확히 인식하고자 할 때 사용합니다. SOP 혹은 한 쪽 방
향에만 리드가 존재하고, 리드의 개수가8개를 넘는 컨넥터의 경우,
이 항목을 체크하면Y방향으로 인식 정도를 높여줍니다.
<Use Lead Scan> 체크박스
‘리드 검색’ 기능
을 이용하여 리드를 찾을 때 사용합니다.
<Use Body to Pre-Align> 체크박스
‘부품 인식시 부품의 Body 정보를 이용하여 부품의 대략적인 위치
를 계산합니다.
<Use Body to Pre-Align> 체크박스
‘부품 인식시 부품의 Body 정보를 이용하여 부품의 대략적인 위치
를 계산합니다.
<Check Full Coverage> 체크박스
이 옵션이 선택되어 있으면 모든 리드를 검사하여 모든 리드가 허용
오차 이내에 있어야 인식이 성공하며, 선택되어 있지 않은 경우는 일