3. SM411F_Administrators_Guide(Kor_Ver5).pdf - 第325页
12-13 Machine Calibration 다 . G1F-X: 전면 Gantry 의 X 축 G1F-Y : 전면 Gantry 의 Y 축 G1R-X: 후면 Gantry 의 X 축 G1R-Y : 후면 Gantry 의 Y 축 H1F-Z1: 전면 Gantry 의 Head 1 의 Z 축 H1F-Z2: 전면 Gantry 의 Head 2 의 Z 축 H1F-Z3: 전면 Gantry 의 Head 3 의 Z…
12-12
Samsung Component Placer SM411F/411FN Administrator
’
s Guide
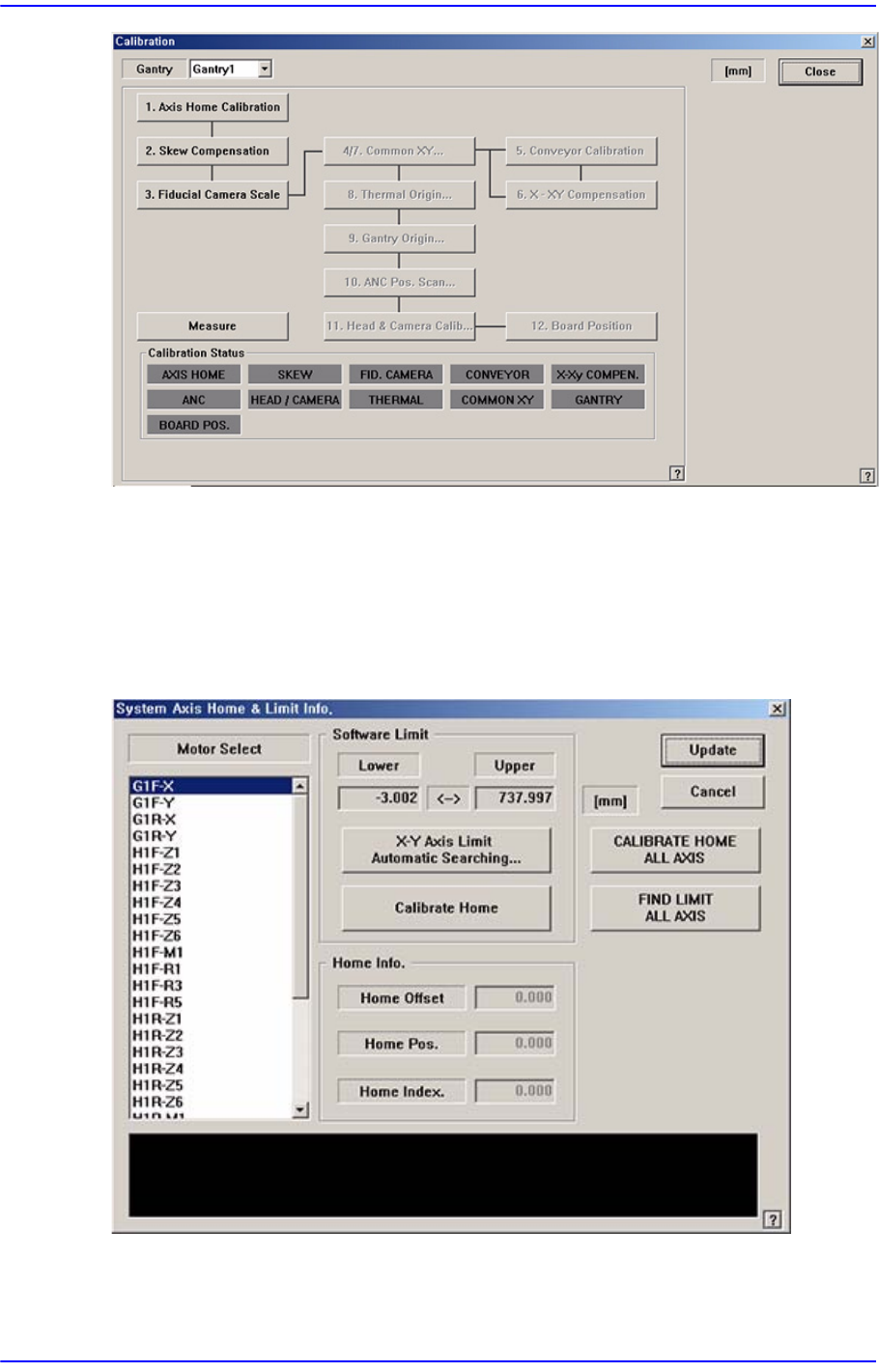
12.3.1. Axis Home Calibration
각 구동축 이동위치의 한계값을 설정합니다. 이 버튼을 선택하면 다음과 같은 대화
상자가 표시됩니다.
그림
12.7
“
System Axis Limit Info.
”
대화상자
<Motor Select> 리스트박스
캘리브레이션을 할 구동축을 선택합니다. 선택 가능한 구동축은 다음과 같습니

12-13
Machine Calibration
다.
G1F-X: 전면 Gantry의 X축
G1F-Y: 전면 Gantry의 Y축
G1R-X: 후면 Gantry의 X축
G1R-Y: 후면 Gantry의 Y축
H1F-Z1: 전면 Gantry의 Head 1의 Z축
H1F-Z2: 전면 Gantry의 Head 2의 Z축
H1F-Z3: 전면 Gantry의 Head 3의 Z축
H1F-Z4: 전면 Gantry의 Head 4의 Z축
H1F-Z5: 전면 Gantry의 Head 5의 Z축
H1F-Z6: 전면 Gantry의 Head 6의 Z축
H1F-M1: 전면 Gantry의 Mirror축
H1F-R1: 전면 Gantry의 Theta 축 (H1, H2)
H1F-R3: 전면 Gantry의 Theta 축 (H3, H4)
H1F-R5: 전면 Gantry의 Theta 축 (H5, H6)
H1R
-Z1: 전면 Gantry의 Head 1의 Z축
H1R-Z2: 전면 Gantry의 Head 2의 Z축
H1R-Z3: 전면 Gantry의 Head 3의 Z축
H1R-Z4: 전면 Gantry의 Head 4의 Z축
H1R-Z5: 전면 Gantry의 Head 5의 Z축
H1R-Z6: 전면 Gantry의 Head 6의 Z축
H1R-M1: 전면 Gantry의 Mirror축
H1R-R1: 전면 Gantry의 Theta 축 (H7, H8)
H1R-R3: 전면 Gantry의 Theta 축 (H9, H10)
H1R-R5: 전면 Gantry의 Theta 축 (H11, H12)
ST1F-W: 작업 컨베이어(R2)의 폭 조절 모터
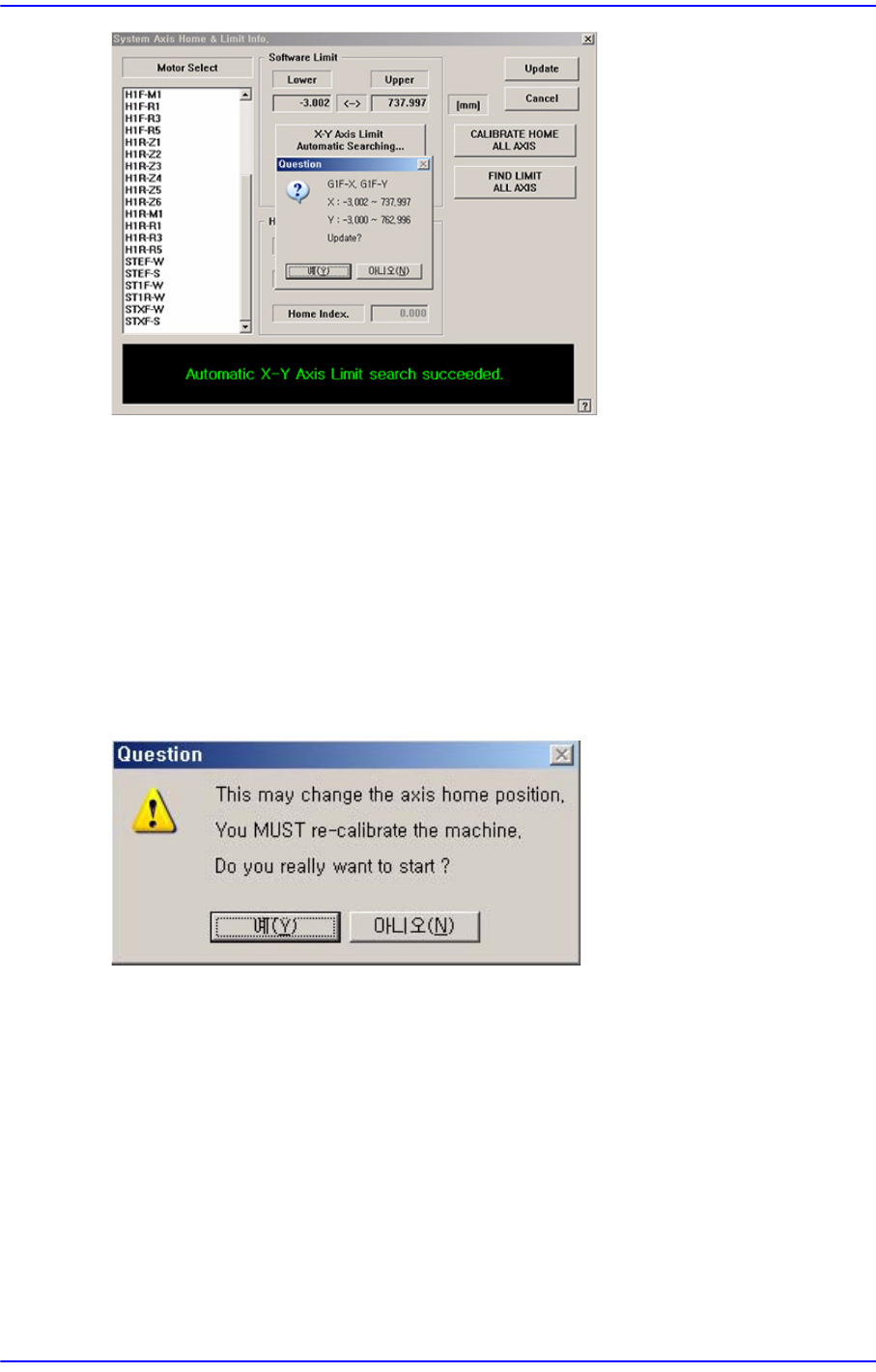
<Software Limit> 영역
<X-Y Axis Limit Automatic Searching…> 버튼
XY 축들의 리미트를 자동으로 찾고, 변경된 값을 적용할 것인지 여부
를 확인합
니다.
12-14
Samsung Component Placer SM411F/411FN Administrator
’
s Guide
<Skew Compensation> 버튼
Y축을 선택할 경우, 활성화 됩니다. Skew Compensation을 수행하기 위해서 사
용됩니다. 자세한 사항은
“
12.3.2 Skew compensation
”
을 참조하십시오.
<Calibrate Home> 버튼
<Motor Select> 리스트박스에서 선택된 모터의 홈 위치를 자동으로 찾아서 반영
합니다.
<CALIBRATE HOME ALL AXIS> 버튼
모든 축들의 홈 위치를 자동으로 찾아서 반영합니다.
<FIND LIMIT ALL AXIS> 버튼
모든 축에 대한 Limit값을 찾습니다.
<Home Info.> 영역
Mirror 축을 선택하면 <Home Offset> 에디트박스가 활성화됩니다. Mirror 축에
대한 캘리브레이션을 할 경우, 사용됩니다.
<Update> 버튼
변경된 값을 적용합니다.
<Close> 버튼
대화상자를 종료합니다.