3. SM411F_Administrators_Guide(Kor_Ver5).pdf - 第238页
8-8 Samsung Component Placer SM 411F/411FN Administrator ’ s Guide 해당 부품을 플럭스 장치로 가져가서 플럭스를 묻혀서 부품 인식 높이로 헤 드 스핀들을 상승시킵 니다 . 플럭스 부품을 흡착할 경우 활성화됩니다 . <Move to Fix Camera> 버튼 해당 부품을 V ision Camera 로 인식하는 경우 , 인식하는 …
8-7
공급장치
설정
주 의 작업 중 해당 기능을 이용하면 해당 피더의 흡착 성공율을 올릴
수 있지만, 포켓티치를 수행하는데 시간이 소요되며, 흡착점
(Pickup Point) 좌표가 보정됨으로써 동시 흡착을 하지 못 할 수
도 있습니다.
메 모 포켓티치를 수행하면, 포켓 티치시 획득한 옵셋정보를 자동
으로 반영하여 테이프 피더의 홈 옵셋을 자동으로 보정합니
다. 단 옵셋 값의 보정은 다음 피딩시 적용됩니다.
Vision 에서 인식한 위치와 논리적 원점간의 거리가 ±0.2mm
가 넘을 경우 피더는 Offset값을 무시합니다.
1005/0603이외의 부품을 사용하는 전동 피더는 HomeOffset
조절 기능을 사용하지 않습니다 .
<Pocket Teach all> 버튼
해당 피더베이스에 설치된 테이프피더 중 “피더등록“ 대화상자의 <Grid>영역
에서 <PT> 열이 ON 또는 ON-S로 설정된 모든 테이프피더에 대해서 ‘포켓티
치’ 기능을 반복적으로 수행합니다.
<Pick> 버튼
현재 “Feeder Base”대화상자에서 선택된 Tape Feeder에 대해서 부품흡착을 실
행합니다. 이 때, Device(흡착을 할 헤드)를 미리 선택하여야 합니다. 흡착이 성
공적으로 이루어지면 다음과 같은 대화상자를 표시합니다 .
<Part Dipping to Flux> 버튼
8-8
Samsung Component Placer SM411F/411FN Administrator
’
s Guide
해당 부품을 플럭스 장치로 가져가서 플럭스를 묻혀서 부품 인식 높이로 헤
드 스핀들을 상승시킵니다. 플럭스 부품을 흡착할 경우 활성화됩니다.
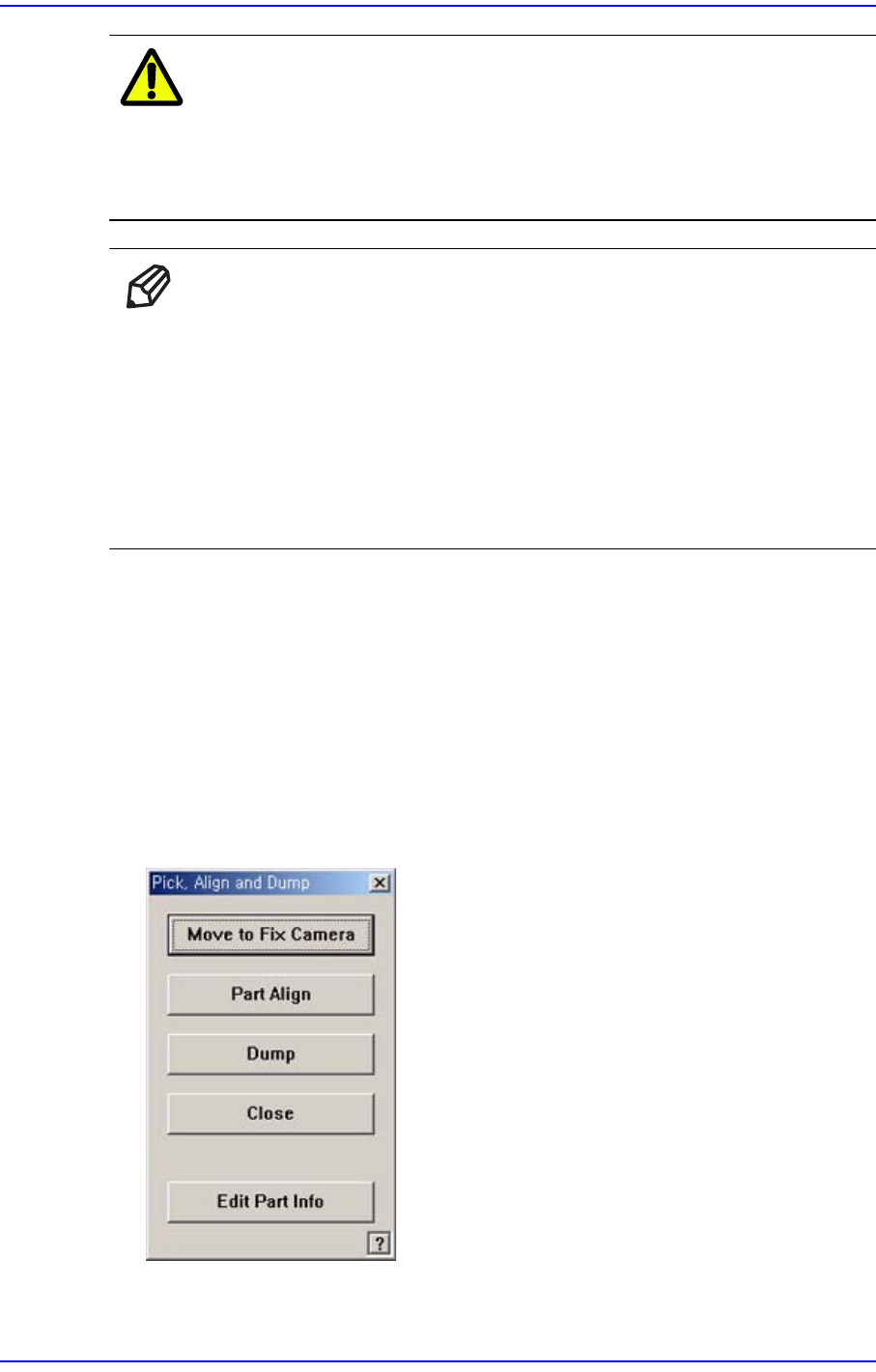
<Move to Fix Camera> 버튼
해당 부품을 Vision Camera로 인식하는 경우, 인식하는 Camera가 Fix Camera
인 경우에만 활성화됩니다.이 버튼을 클릭하면, <Teach> 영역의 <Device>
콤보박스에서 선택된 대상을 Fix Camera위치로 이동시킵니다.
<Part Align> 버튼
해당 부품을 인식합니다.
<Dump> 버튼
해당 부품을 지정한 Dump Box에 버립니다.
<Close>
버튼
대화상자를 닫습니다.
<Edit Part Info> 버튼
해당 부품의 Part Edit 대화상자를 보여줍니다.
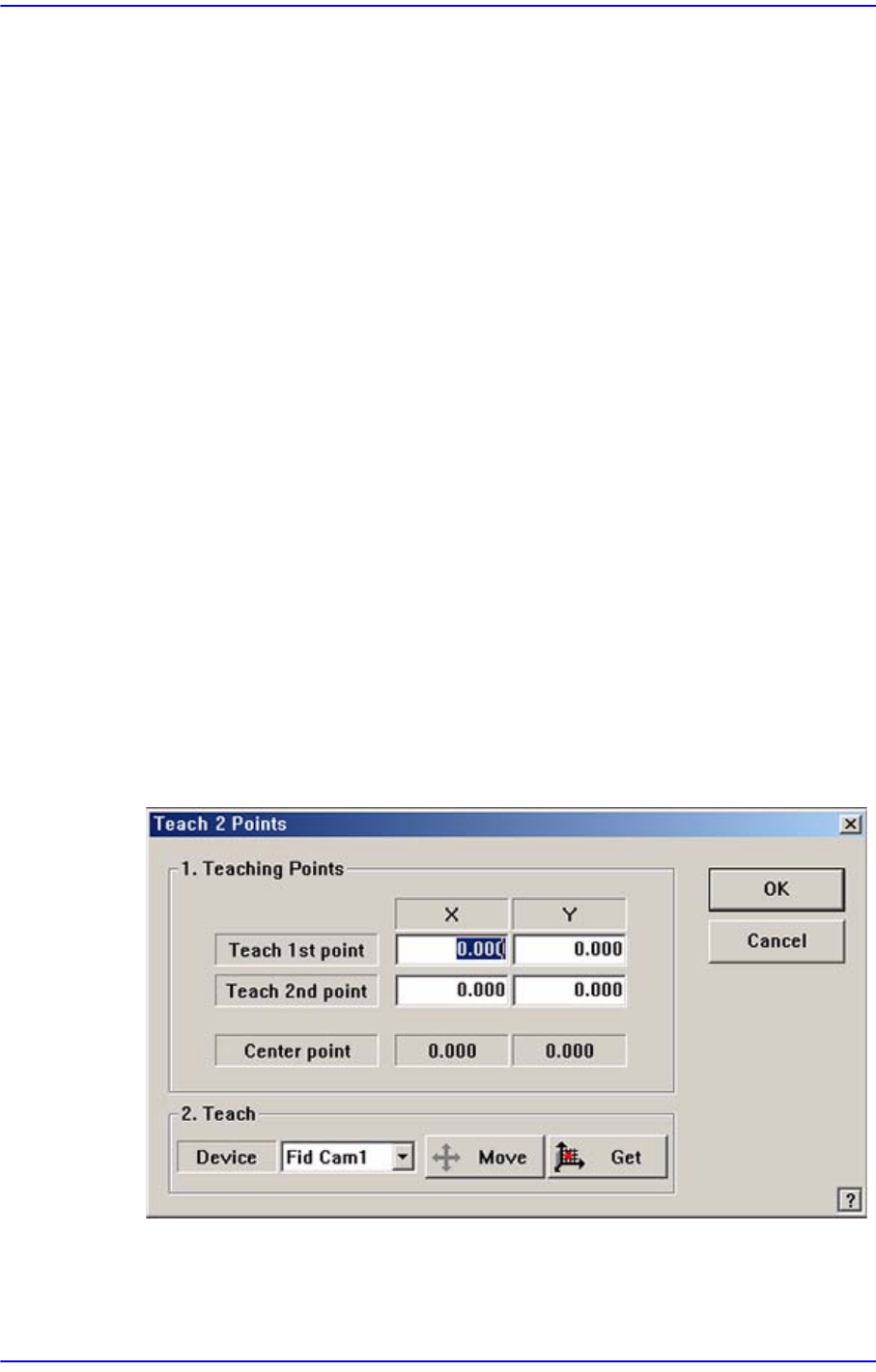
<2Pt. Teach…> 버튼
Tape Feeder의 흡착점을 티칭할 때, 화면에 부품이 전부 보이지 않아 부품의 중
심을 티칭하기 어려울 때 사용하는 기능으로 해당 부품의 대각선 모서리 2점을
티칭함으로써, 부품의 중심을 티칭하는 방법입니다. 이 버튼을 클릭하면 다음
과 같은 대화상자가 표시됩니다.
그림
8.4
“
Feeder : Feeder Base
에서
2point Teach
”
대화상자
<1. Teaching Points> 영역
중심점을 구하기 위한 모서리 2점의 위치를 티칭합니다.

8-9
공급장치
설정
Teach 1st point: 모서리 2점 중 첫째 점의 위치를 티칭합니다.
Teach 2nd point: 모서리 2점 중 둘째 점의 위치를 티칭합니다.
Center point: 모서리 2점의 위치로부터 중심점을 구해서 표시합니다.
<2. Teach> 영역
XY축 구동모터를 회전시켜 선택된 대상을 지정한 좌표의 위치로 이동시키
거나, 선택된 대상의 현재 좌표를 얻기 위해서 사용됩니다.
<Device> 콤보박스
XY축 구동모터를 회전시켜 지정한 좌표의 위치로 이동시킬 대상을 선
택하거나, 현재 좌표를 알고 싶은 대상
을 선택하기 위해 사용됩니다. 선
택 가능한 대상은 다음과 같습니다;
Fid Cam1: 전면 Gantry의 Fiducial Camera를 선택합니다.
Fid Cam2: 후면 Gantry의 Fiducial Camera를 선택합니다.
Head1~Head12: 1번 ~ 12번 Head를 선택합니다.
<Move> 버튼
<Device> 콤보박스에서 선택한 대상을 지정한 좌표의 위치로 이동시킵
니다. 이 때 , <Move> 버튼을 클릭하기 전에 원하는 위치에 해당하는 티
칭위치 (티칭점 좌표)를 마
우스로 클릭해야 합니다.
<Get> 버튼
<Device> 콤보박스에서 선택한 대상을 기준으로 X, Y 좌표를 얻습니다.
이 때, <Get> 버튼을 클릭하기 전에 원하는 위치에 해당하는 티칭위치 (
티칭점 좌표)를 마우스로 클릭해야 합니다.
<Pusher U/D> 버튼
Grid의 현재 행의 Slot에 있는 공압 실린더를 Up, Down합니다. Feeder 구동 실린
더를 on으로 하면 Feeder의 구동레버가 들어 올려지고 Feeder상부의 셔터가 열
립니다. 흡착점 Teach는 이 상태에
서 실행합니다.
<Slot Pitch> 버튼
이 버튼이 선택되면 각 피더슬롯의 좌표가 1번 슬롯의 흡착점을 원점으로 해서
상대적인 좌표로 표시가 됩니다.
그리고, 선택이 해제되면 각 슬롯에 대해서 설정된 흡착점 좌표에서 실제 티칭
을 통해서 설정된 흡착점을 기준으로 Offset 좌표가 표시됩니다.
<Remove All Tapes> 버튼
현재 Feeder Base Unit에 설치되어 있는 모든 Tape Feeder들을 제거합니다.
<Change Slot> 버튼
기존에 설치되어있는 Tape Feeder를 다른 Slot으로 이
동합니다. 변경 내용은