YCP10_Users_C.pdf - 第84页
3-8 3 3.2 基板的传送 YCP10 印刷机不使用主挡板而采用“伺服传送” 。与使用主挡板的传送不同,伺服传送是通过传感器的感应与伺服 电机的旋转量决定基板的停止位置,因此受传送速度、基板材质、表面处理、形状与重量等的影响,停止位置可 能会不稳定 ( 有偏差 )。尤其是传送背面贴装有元件的基板时,受偏差量的影响,在固定基板时,可能会出现基板 被顶针等过度上顶的情况。因此,本印刷机设计有稳定基板停止位置的功能与使传送节拍高速化的功能…
3-7
3
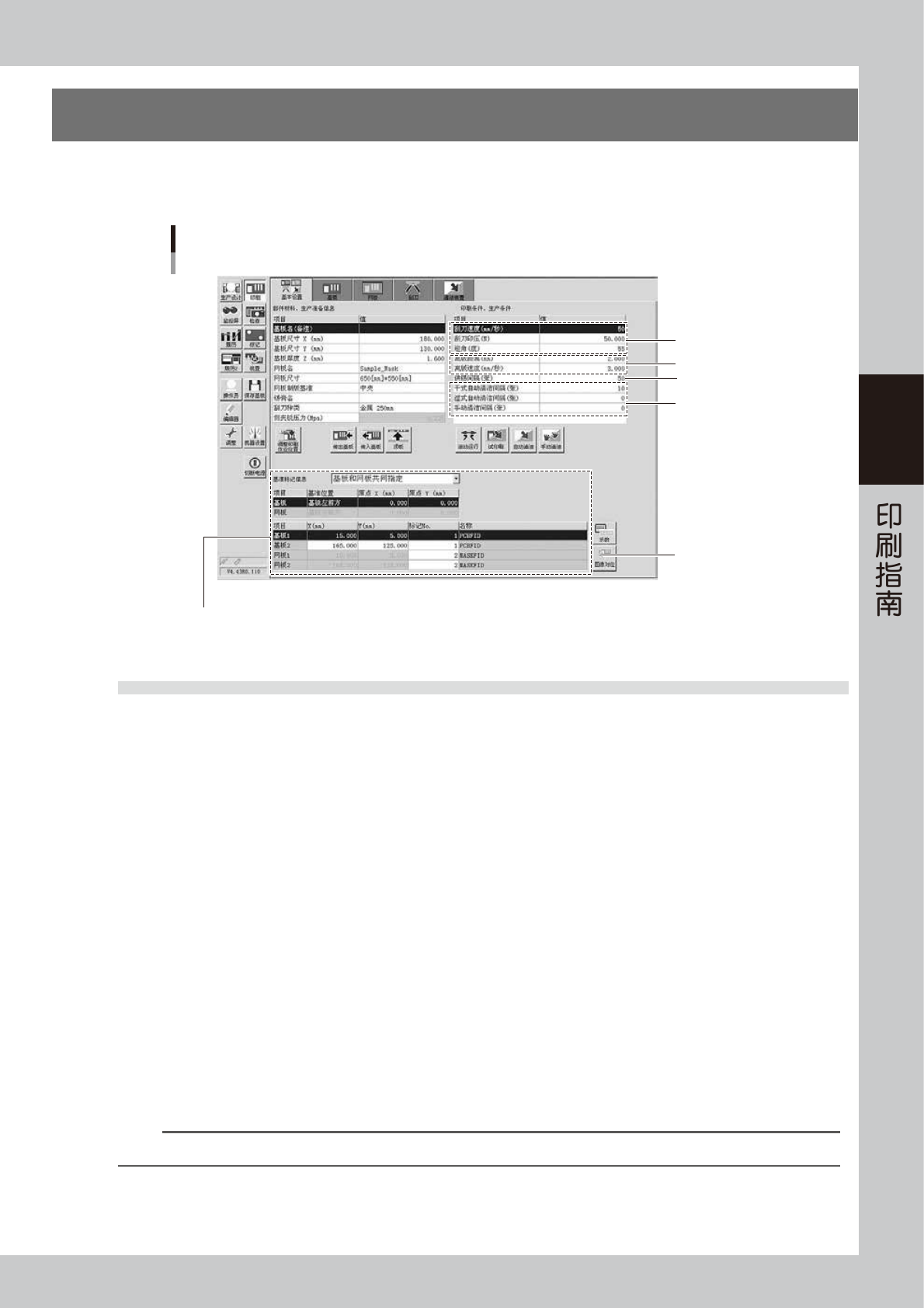
3.各设置项目的详细内容
为确保良好的印刷质量,必须正确设置前面所介绍的印刷机各项动作的条件。
在此,就各项动作的条件对印刷质量产生的影响分别进行详细介绍。
各设置项目
3.3 标记位置
3.4 对位偏移量
3.5 滚动运行
3.7 离版
3.8.1 清洁间隔
3.6 供锡间隔
66304-N1-00
3.1 基板的固定
3.1.1 侧夹板压力
■ 作用
从侧面夹紧基板进行固定时驱动汽缸的供给气压。
■ 设定范围和默认值
在 0.001 〜 0.225MPa 范围内设置。默认值为 0.225MPa。
■ 设置方法
通过侧夹板用气压调节器调节侧夹板的压力,使基板既被固定又无变形。
3.1.2 支撑夹具
■ 作用
固定基板时从下方支撑基板用的夹具。
■ 设定方法
支撑夹具有下列 3 种类型。
‧
矩阵式顶针 :在矩阵式顶板上插入顶针支撑(印刷双面贴装基板的 B 面等时)。
‧
平面支撑夹具 :在矩阵式顶板上放置支撑块支撑 ( 印刷 1 面为平面的贴装基板时)。
‧
吸气顶板 :基板厚度在 0.5mm 以下时使用 ( 在“基板”选项卡内设置 )。
n
要点
矩阵式顶针和平面支撑夹具也可以同时使用。
3-8
3
3.2 基板的传送
YCP10 印刷机不使用主挡板而采用“伺服传送”。与使用主挡板的传送不同,伺服传送是通过传感器的感应与伺服
电机的旋转量决定基板的停止位置,因此受传送速度、基板材质、表面处理、形状与重量等的影响,停止位置可
能会不稳定 ( 有偏差 )。尤其是传送背面贴装有元件的基板时,受偏差量的影响,在固定基板时,可能会出现基板
被顶针等过度上顶的情况。因此,本印刷机设计有稳定基板停止位置的功能与使传送节拍高速化的功能,请根据
生产的基板进行设置。
c
注意
生产之前,请务必确认传送状态,要求既无过度上顶基板也无基板跌落等现象。
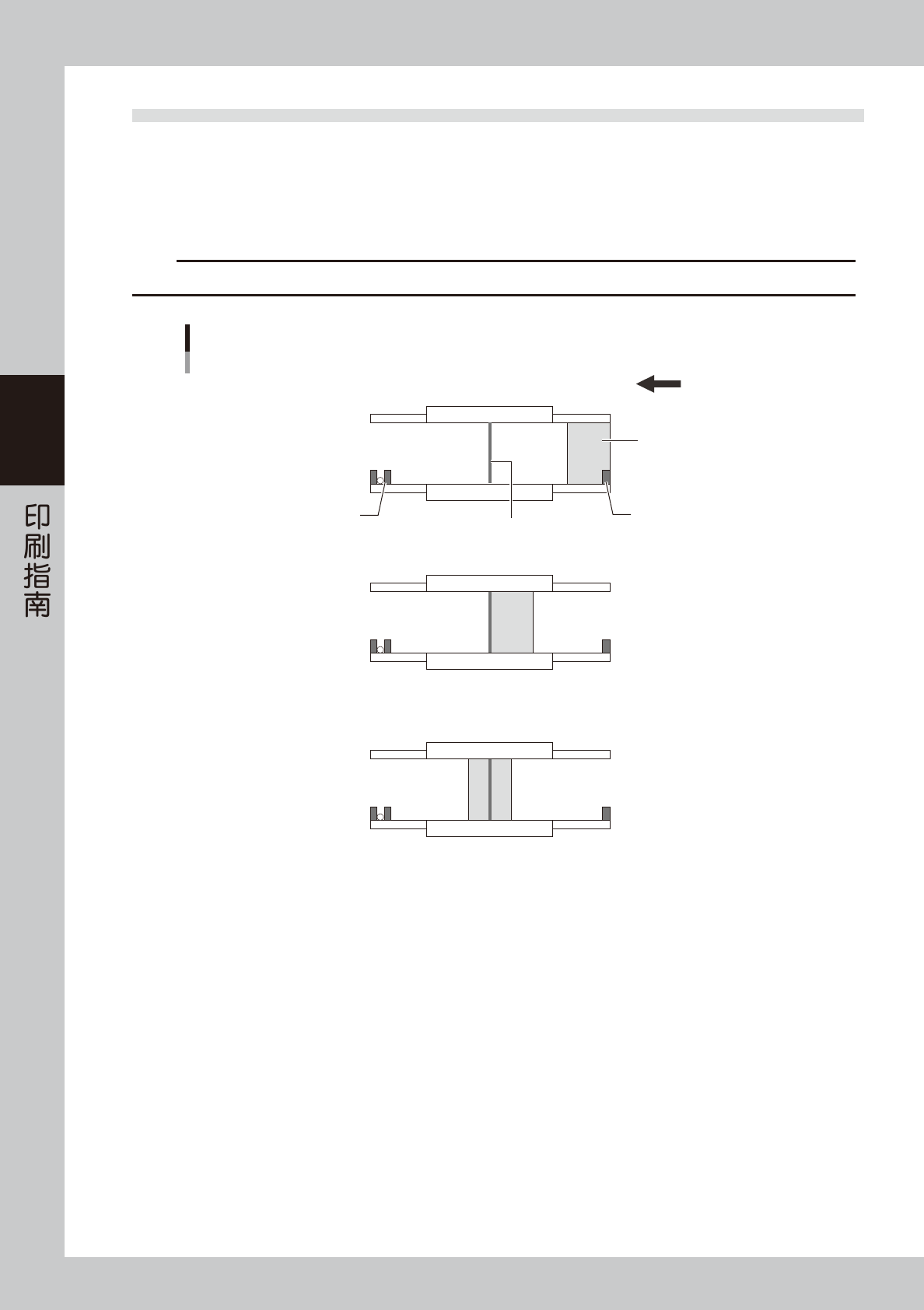
由伺服电机传送基板的示意图
■ 开始传送
■ 检测到基板
■ 传送结束
出口传感器
入口传感器
基板
印刷位置传感器
传送方向(右→左)
65307-N1-00
3.2.1 确认传送位置
■ 作用
通过基板用相机识别任意的标记来校正固定基板之前的传送偏移量。
由此可提高固定基板时的位置精度。
■ 设置方法
将 [ 印刷 ]-“基板”选项卡的“p. 确认传送位置”参数设置为“启用”之后,设置相关的参数。
( 各项参数的详细内容,请参照后述第 5 章“3.1基板标记与参数的设置”。)
3-9
3
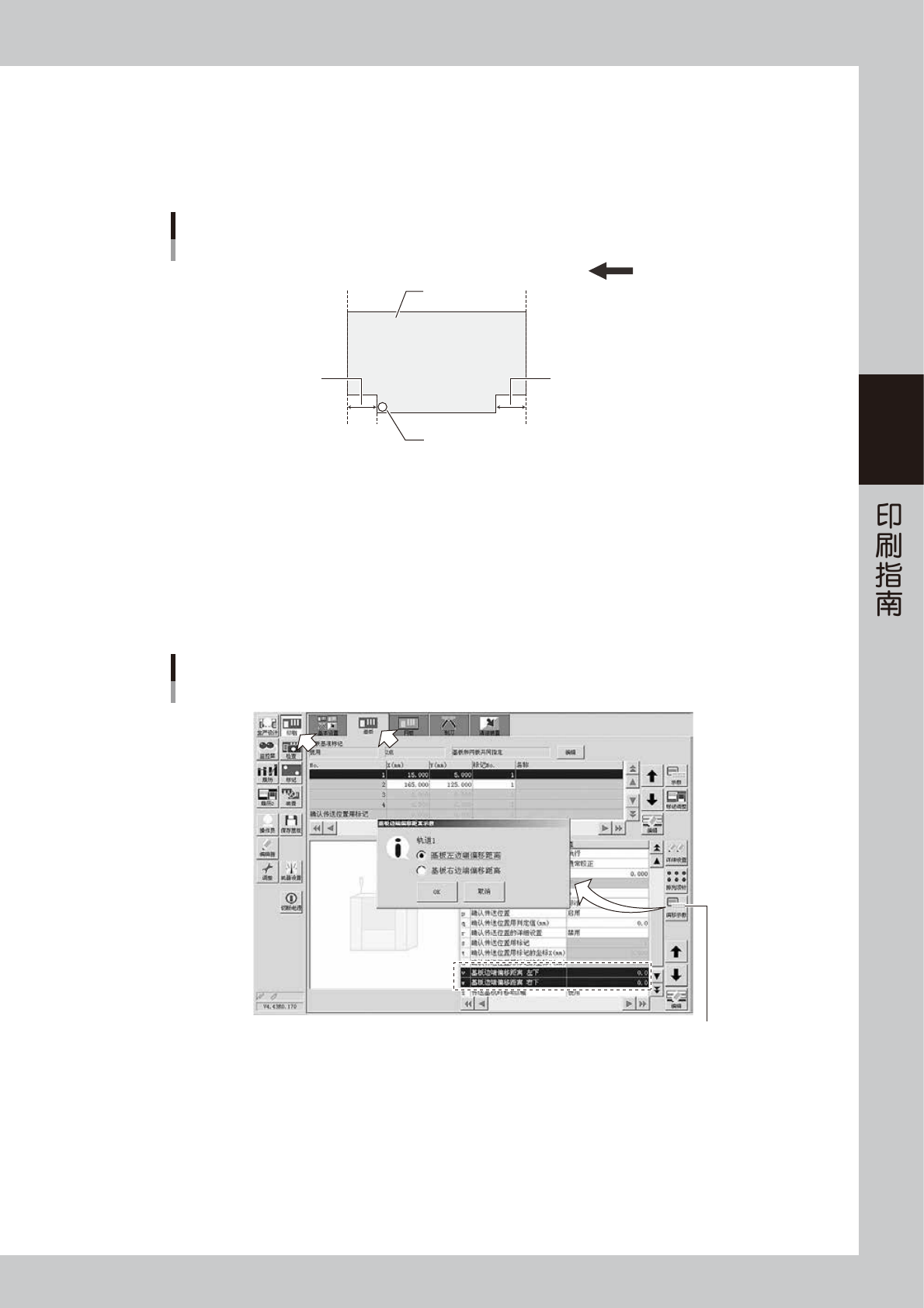
3.2.2 基板边端偏移距离
■ 作用
根据基板的切口、边的形状,基板检测传感器有无法检出基板边端的情况。此时,可以设置基板边端到传感器检测位置之间
的距离,使基板的停止位置偏移所设置的距离。
基板边端偏移距离
基板边端偏移距离
传送方向(右→左)
基板边端
基板
传感器检测位置
基板边端
基板边端偏移距离
65308-N1-00
■ 设置方法
使用时,在 [ 印刷 ]-“基板”选项卡的“v.基板边端偏移距离左下”或“w.基板边端偏移距离右下”参数中输入偏移距离。
不使用时,不必输入直接使用默认值“0.0”。
输入方法,请参照下列步骤通过示教输入。
1.按 [ 印刷 ]-“基板”选项卡的 [ 偏移示教 ] 按钮。
2.显示选择基板边端的对话框之后,选择需要示教的基板边端并按 [OK] 按钮。
基板边端偏移距离
[偏移示教]按钮
[偏移示教]按钮
66307-N1-00