yamaha贴片机培训教材,yamaha贴片机编程培训,yamaha培训中心教材[1].pdf - 第60页
Operation t r aining course for YG100 第 1 6 页 坐标的一组 Mark ; Local F id. : 用于补偿某一组或 一个元件贴装坐标的一组 Mark ; Point Fid. : 用于补偿某一 个元件贴装坐标的一组 Mark( 此 MARK 坐标应从被贴装焊盘 的中心计算, 没有 PCB 原始数据时通常不使用 ) 。 Edit :点击该按钮可以选择是否使用以上所述各种 Fiducial 。…
Operation training course for YG100 第 15页
Step Mode:点亮后用图中的箭头键移动相机时可以平稳匀速移动。
0.010:该数据为单步移动的幅度,可用下面的三角箭头选择 0.010mm、0.1mm、及 1mm 等。
Speed(%):可以调整移动的速度,可以用下面的三角箭头选择不同的速度。
Light:可选择不同的灯光照明,以达到视野清晰的效果。
Setting:可以选择是否通过识别 Mark 来补偿 PCB 位置偏移,同时也可选择对拼板的某一小块
上的元件坐标进行操作。
Trace:用于追踪但前坐标,Trace Previous、Trace Next,用于追踪上一行或下一行坐标。
Set Point:当元件尺寸超出 Camera 视野时,可以通过多点的方式找到元件中心。
Teach:可以将当前坐标直接记入程序。
Adjust: Adjust 按钮用于调试目前材料的各项识别参数,请参见”PARTS”一节讲述, 不再赘述。
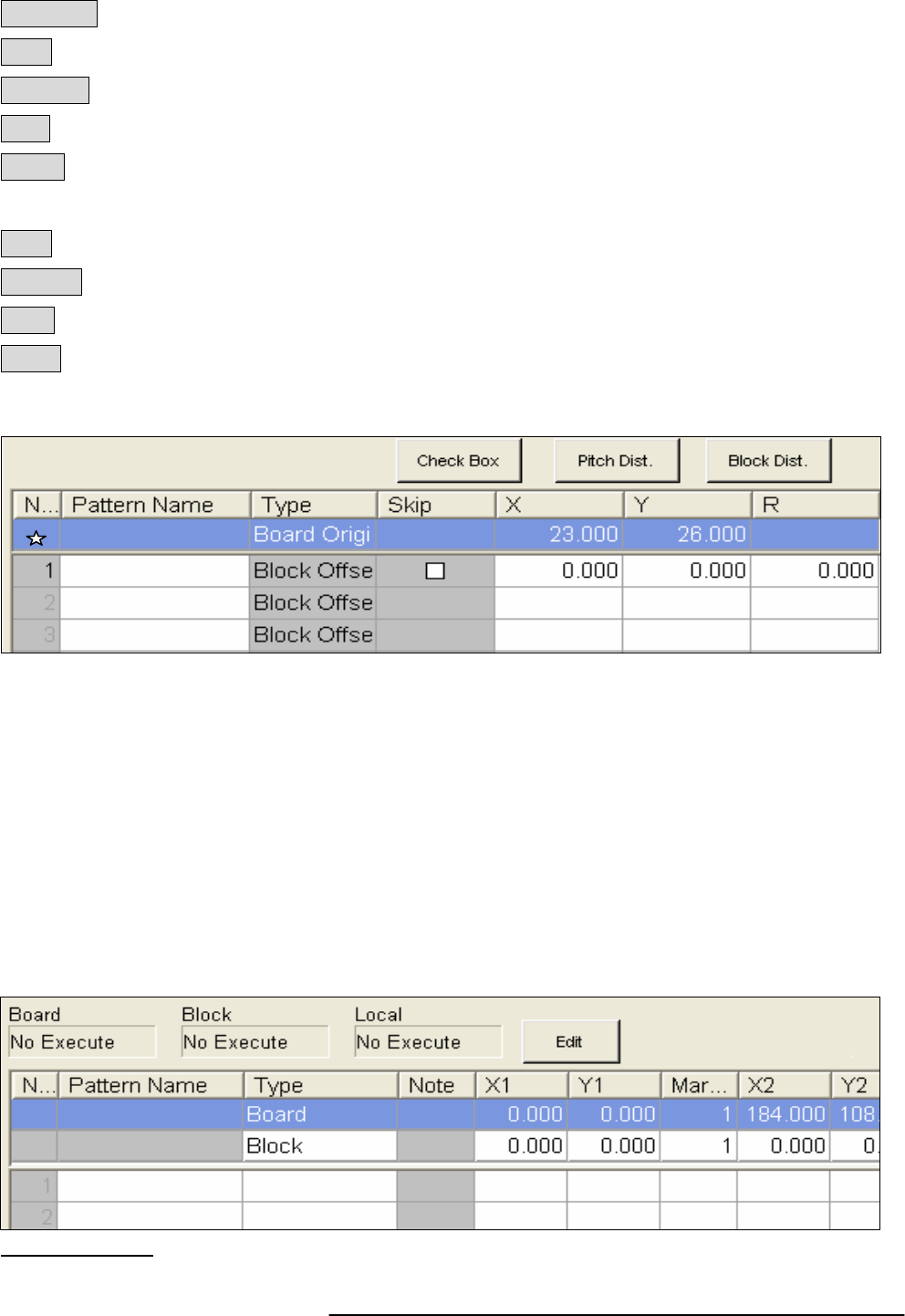
3.1.4 OFFSET 参数
Check Box:该键按下后可以用鼠标直接在“Skip”一栏的方框里打“X”以便跳过某一拼板,
否则不能进行以上操作,以防止误操作。
*
:上图“*”处的一行“Board Origin”表示 PCB 坐标原点位置,可以点击“Teach”按钮再
直接通过镜头提取得到。一般定义在第一块拼板上的某一特征点,以方便接下来的操作。
·· 图中从表格的第二行起(即编号为 1、2、3….等所示的各行),每一行代表该 PCB 的一块
拼板,而且每一行的 X、Y、R 分别表示该拼板的相对坐标。
Pattern Name:可以输入各拼板的名称(如“Block1、Block2….)对机器运行不产生影响,只
是用于区分拼板的序号。
3.1.5 FIDUCIAL 参数
几种常用
Fid.
概念:
Board Fid:
定义用于补偿整块
PCB
贴装坐标的一组
Mark
点;
Block Fid.
:定义用于补偿某一拼板贴装
Operation training course for YG100 第 16页
坐标的一组
Mark
;
Local Fid.
:用于补偿某一组或一个元件贴装坐标的一组
Mark
;
Point Fid.
:用于补偿某一
个元件贴装坐标的一组
Mark(
此
MARK
坐标应从被贴装焊盘的中心计算,没有
PCB
原始数据时通常不使用
)
。
Edit:点击该按钮可以选择是否使用以上所述各种 Fiducial。
X\Y
:
上图中表格里的 X、Y、值分别表示定义的各个 Fid 的坐标位置。
Mark1
、
Mark2:该列数字表示前面 X、Y 坐标定义的 Fiducial 在“Mark”参数中对应的行号,
两个 Mark 可以相同,也可以不同,其中 Mark2 的数字如果为“0”则表示与 Mark1 相同(如“Mark1
为 1,Mark2 为 0”等同于“Makr1 为 1,Mark2 为 1”)但是 Mark1 的数字不能为 0。
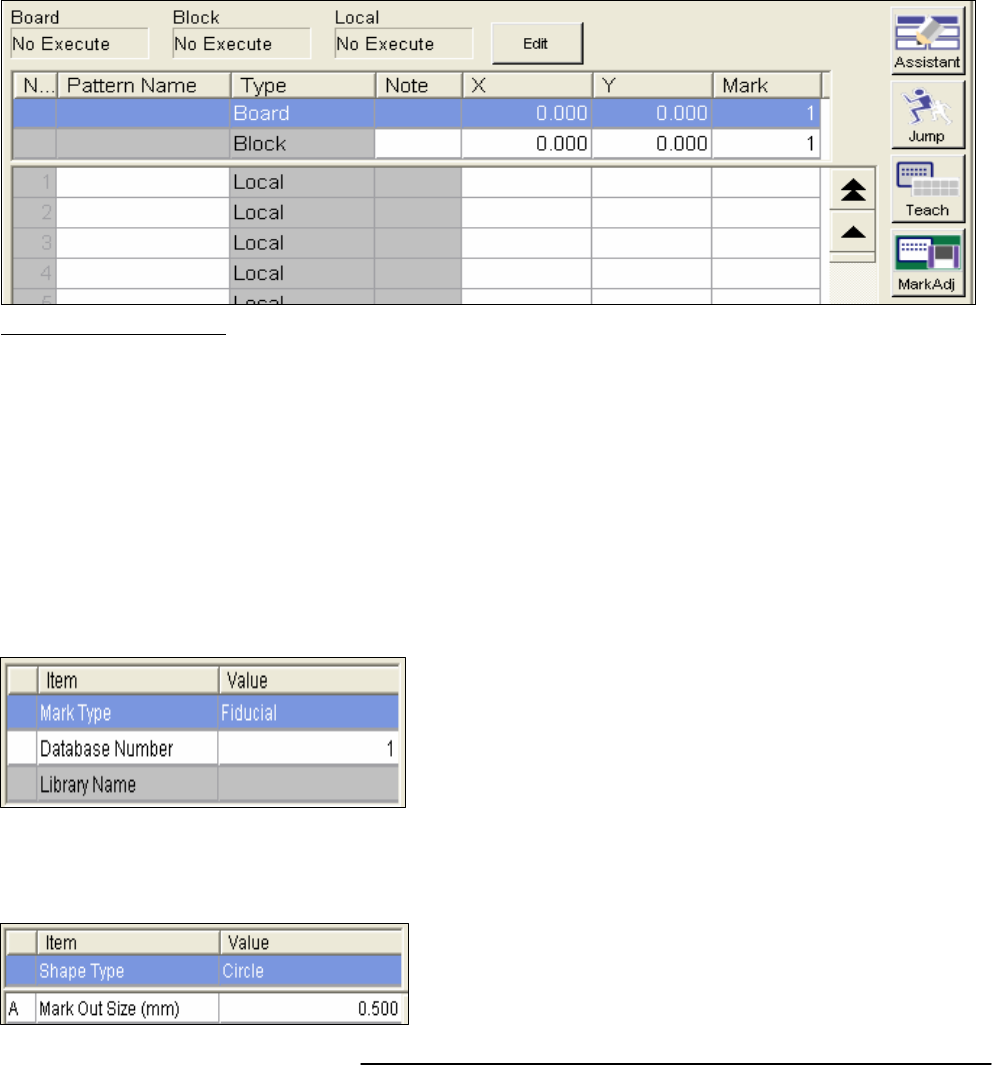
3.1.6 BADMARK”参数
几种常用
Bad Mark
概念
:
Board Bad Mark
:定义用于判断整块
PCB
是否贴装的
Bad Mark
;
Block Bad Mark
:定义用于判断某一拼板
是否贴装元件的
Bad Mark
;
Local Fid.
:在整板程序中用于判断某一个元件是否贴装的
Bad Mark
Edit
:点击该按钮可以选择是否使用以上所述各种
Bad Mark
。
X\Y
:
上图中表格里的 X、Y、值分别表示定义的各个的坐标。
Mark:该列数字表示前面 X、Y 坐标定义的 Bad Mark 在“Mark”参数中对应的行号
。
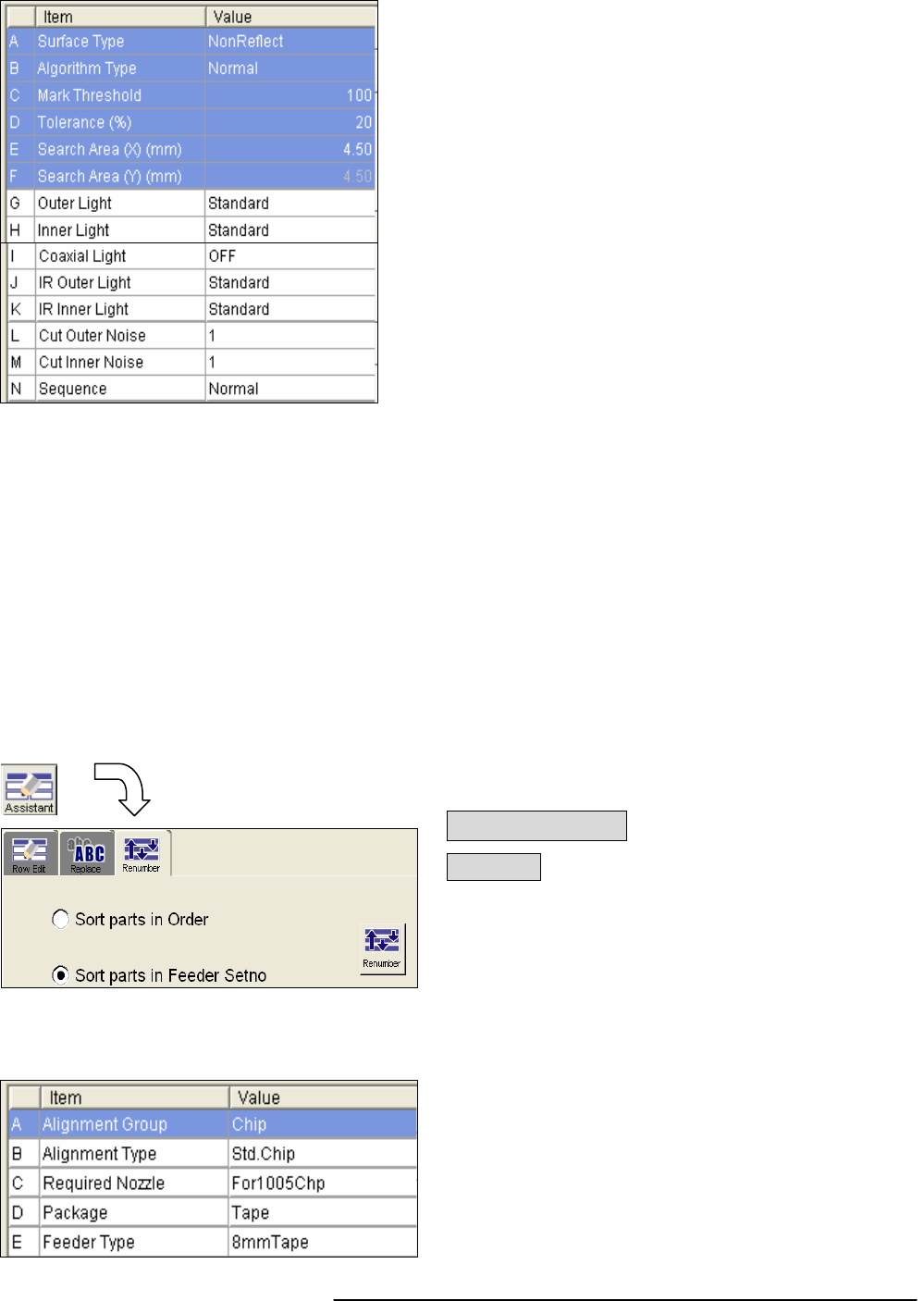
3.1.7 MARK 點( Fiducial )的設定
Basic
(基本)参数设定
Mark Type :定义该 Mark 是用于调整贴装坐标的
Fiducial,还是用于判断坏板的 Bad Mark。
Database:该 Mark 在机器 Database 中的位置(机器出
厂前已经编辑好了部分常用的 Mark 放在一个库存里)。
Library Name:该参数没有意义,不能设定。
Shape
(形状)参数设定
Shape Type:设定该 Mark 的形状,有圆形、长方形、
三角形等多种选择。
Mark Out Size:设定该 Mark 的外形尺寸。
Operation training course for YG100 第 17页
Vision
(识别)参数的设定和调试
Surface Type:设定该 Mark 的表面类型,主要有
Nonreflect(不反光)和 reflect(反光)两种选择.
Algorithm Type:设定运算方式通常选择“Normal”,对
于某些识别不稳定的 Mark 可以选用焊盘外轮廓等方
式识别,精度可能稍差。
Mark Threshold:计算机语言通过灰阶值来描述一个黑
白像素的色度,0 代表最黑,255 代表最白。机器识别
Mark 时,某一像素灰阶小于该值就以黑色处理计算,
大于该值则判断为白色。
Tolerance:表示识别该 Mark 时允许的误差。
Search Area X
、
Y:设定识别 Mark 时 X、Y 方向上的
搜索范围,超过此范围机器则不进行识别。
Outer Light
、
Inner Light
、
Coaxial Light
、
IR Outer Light
、
IR Inner Light:识别 Mark 时 Camera
前端用于照亮 Mark 的灯光分为“外圈灯光、内圈灯光、同轴光、IR 内圈光、IR 外圈光”等机
中灯光,其中每一种灯光可以分别选择不同的亮度。
Cut Outer Noise
、
Cut Inner Noise:识 别 Mark 时可以通过这两个参数设定来过滤掉 Mark 内部和
外部影响正常识别的干扰噪点。
Sequence:有 Quick、Normal、Fine 三种模式,分别表示不同的运算精度。
3.1.8 Parts 数据的输入和调试
单击 Assistant 如图画面:
钮 Parts 数据会按 Feeder 安装的顺序自动排列,没有安装 Feeder 的站位对应的行会留空。
Basic
参数
Alignment Group:机器将材料粗分为“Chip、Ball、
IC、Special….” 等若干大的组别,根据不同的材
料选择其归属的组别。
Alignment Type:机器在将材料粗分为上述几组
Row Edit、Replace:可参照前面讲述学习。
Renumber:选择 Sort Parts In Order 后单击右下方
的“Renumber”按钮 Parts 数据会按逐行顺序自
动排列,中间不会有空行。选择“Sort Parts In
Feeder Setno” 后单击右下方的“Renumber”按