yamaha贴片机培训教材,yamaha贴片机编程培训,yamaha培训中心教材[1].pdf - 第65页
Operation t r aining course for YG100 第 2 1 页 Comp. T olerance :机器识别元件时允许的误差范围。 Search Ar ea :机器识别元件时的搜索范围。 Datum Angle : 通常情况下机器对方向的规定是 “上北、 下南、 左西、 右东” 更改这个参数可以 改变机器对方向 的规定,如设为 180 度,则变为“上南、下北、左东、右西” 。 Comp. Intensity …
Operation training course for YG100 第 20页
Pick Up:规定吸料时 Head 上升的动作,可以选择“Air”、“Fast Air+Servo”、“Slow Air+Servo”
等不同的模式。
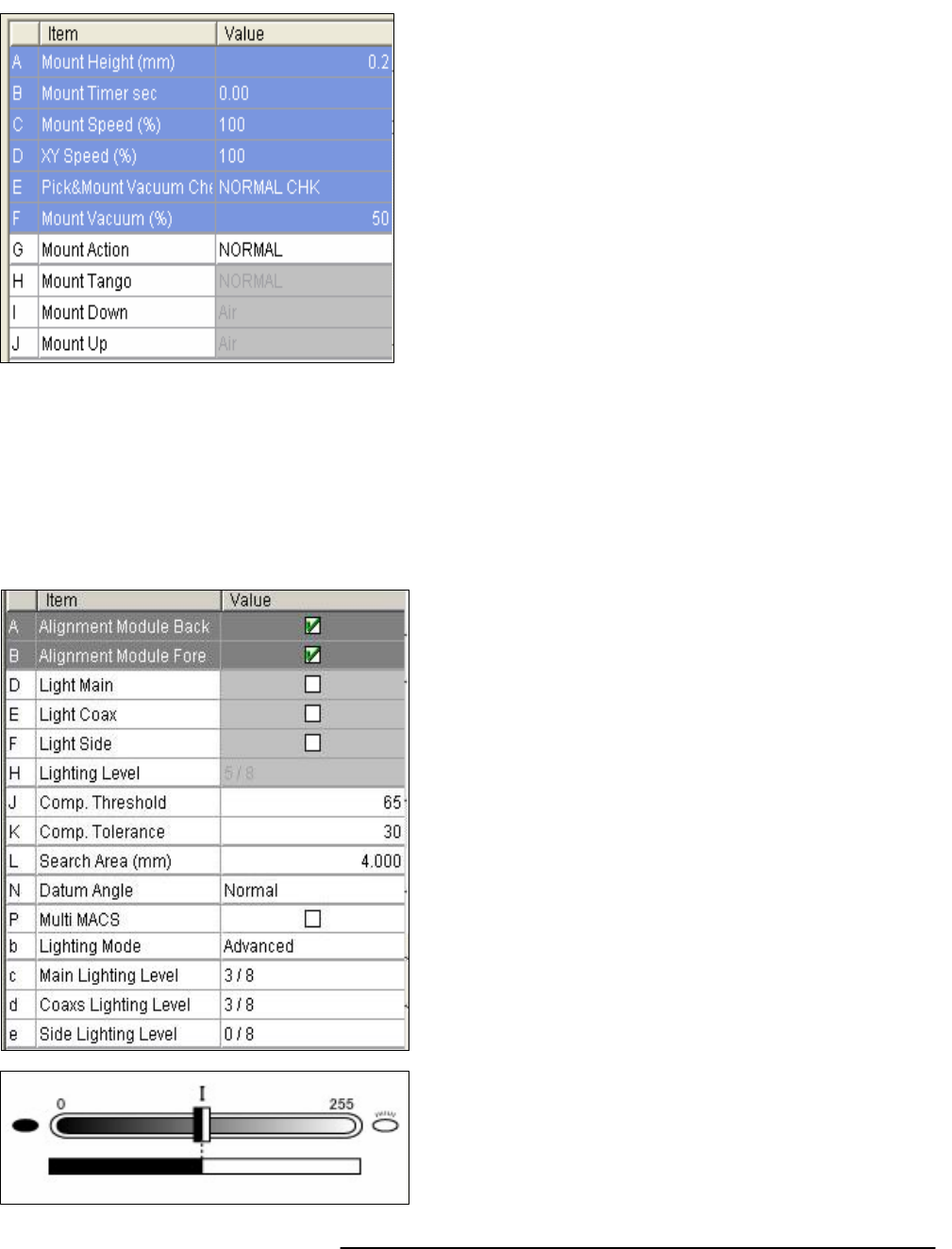
Mount 参数
Mount Vacuum:机器贴装材料时当真空减小到设定的值后,才认为材料已经贴好,然后吸嘴才
从材料表面抬起。
Mount Action
、
Mount Tango
、
Mount Down
、
Mount UP:这一组参数与前述 Pick 参数中相对应
的参数意义相似,只是这里规定的是贴装时的各种动作模式,可以参照学习。
Vision 参数
Mount Height:贴装材料时 Head 高度的补偿值,
正数表示默认贴装高度开始向下压低的高度,负
数 表示从默认贴装高度开始向上提高的高度。
Mount Timer:材料贴装到 PCB 上后吸嘴抬起前的
延时。适当设定延时有利于材料贴装的稳定性。
Mount Speed:吸嘴贴装材料的速度,共有 10%~
100%10 个不同的速度等级。
XY SPEED
、
Pick
&
Mount Vacuum Check:其意义
和上述 Pick 参数中讲述的相同,这里不再赘述。
Alignment Module Back:背光识别模式,即透射识别
模式,该识别模式需要另外安装专用配件才有效,通
常情况下不能使用。
Alignment Module Fore:前光识别模式,即照相机
通过反射模式识别材料,通常使用该模式工作。
Light Main:相机识别材料时打开或关闭主光光源。
Light Coax:识别材料时打开或关闭同轴光光源。
Light Side:相机识别材料时打开或关闭侧光光源。
Lighting Level:相机灯光的强度,有 8 个强度等级。
Comp.Threshold:计算机语言通过灰阶值来描述一
个黑白像素的色度,0 代表最黑,255 代表最白。机
器识别元件时,某个像素如果灰阶小于该值就以黑
色处理计算,大于该设定值则判断为白色,这样将
亮度不同的地方通过运算处理后用二进制的方法描
述出来如左图。
Operation training course for YG100 第 21页
Comp. Tolerance:机器识别元件时允许的误差范围。
Search Area:机器识别元件时的搜索范围。
Datum Angle:通常情况下机器对方向的规定是“上北、下南、左西、右东”更改这个参数可以
改变机器对方向的规定,如设为 180 度,则变为“上南、下北、左东、右西”。
Comp. Intensity:规定元件的最小亮度,如设为 30,当某个元件识别时平均亮度小于 30 则机器
会以不良材料处理将其抛掉,适当设定该参数会一定程度上避免产品“漏件”。
Multi MACS:机器用来进一步补偿 Ball Screw 加工误差的装置,分别安装在机器 Head Unit 的
左右两侧。
Lighting Mode:有“Normal”、和“Advancad”两个选择,选择“Normal”则接下来的 c、d、e
三个参数无效,上述 H 参数有效,此时 Light Coax、 Light Main 和 Light Side三种灯光的 Lighting
Level 只能一同增减;选择“Advanced”则接下来的 c、d、e 三个参数
有
效,上述 H 参数
无
效,
此时 Light Coax、 Light Main 和 Light Side 三种灯光的 Lighting Level 可以分别设定,以达到最
好的识别效果(此为 YG100 新增功能)。
Main Lighting Level
、
Coax Lighting Level
、
Side Lighting Level:分别设定三种灯光的亮度级别。
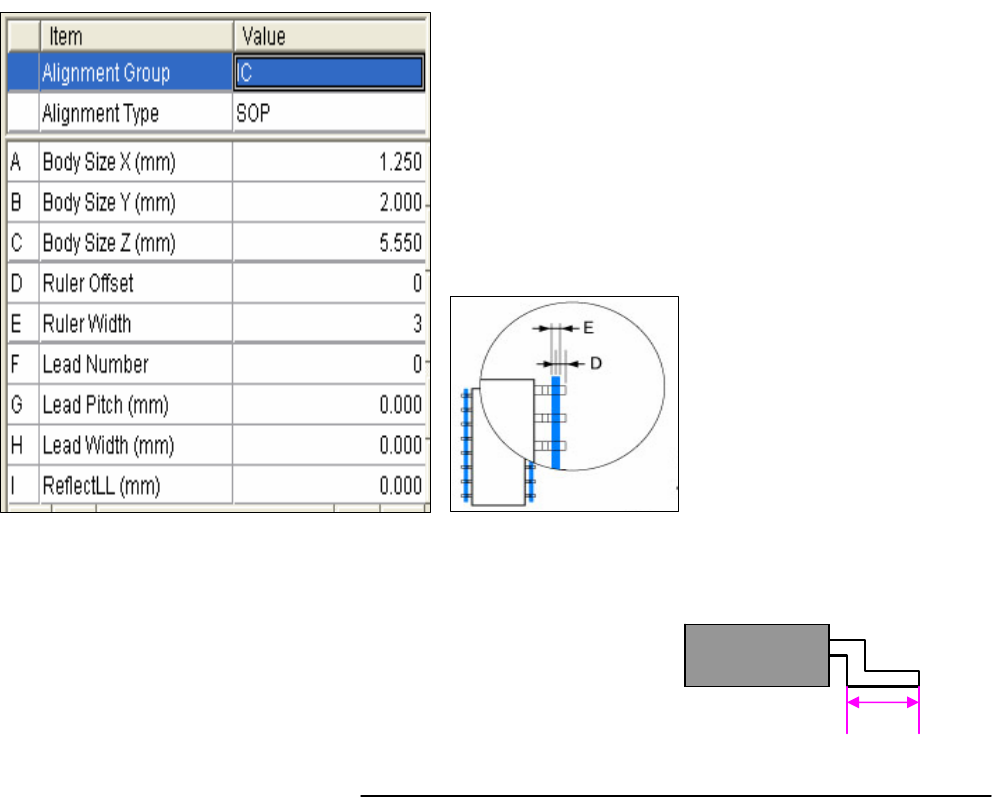
Shape 参数
Leader Pitch:被测元件相邻两管脚之间的间距(需从相邻管脚的同一位置测算)。
Leader Width:元件的管脚宽度。
Reflect LL:元件管脚可反光的部分的长度,对于一般的
IC 管脚来说都有一段弯曲的形状,应该只计算外端水平延
伸的一段。如右图 I 所示。
A
li
g
nment Group
、
Alignment Type:详见前述“Basic
”
一节讲述。
B
od
y
Size X
、
Y
、
Z:分别设定元件的长宽厚等参数。
R
uler O
ff
se
t
:识别元件时会虚拟一个的标尺线,通
过 Ruler Offset 可以设定该标尺的位置,该值越大则
测定位置越靠近元件内侧,如左下图“D”所示。
Ruler Width:机器识别元件
时的标尺线的宽度,如下右
图“E”所示。
Leader Number:元件单侧
的管脚数量。
I
Operation training course for YG100 第 22页
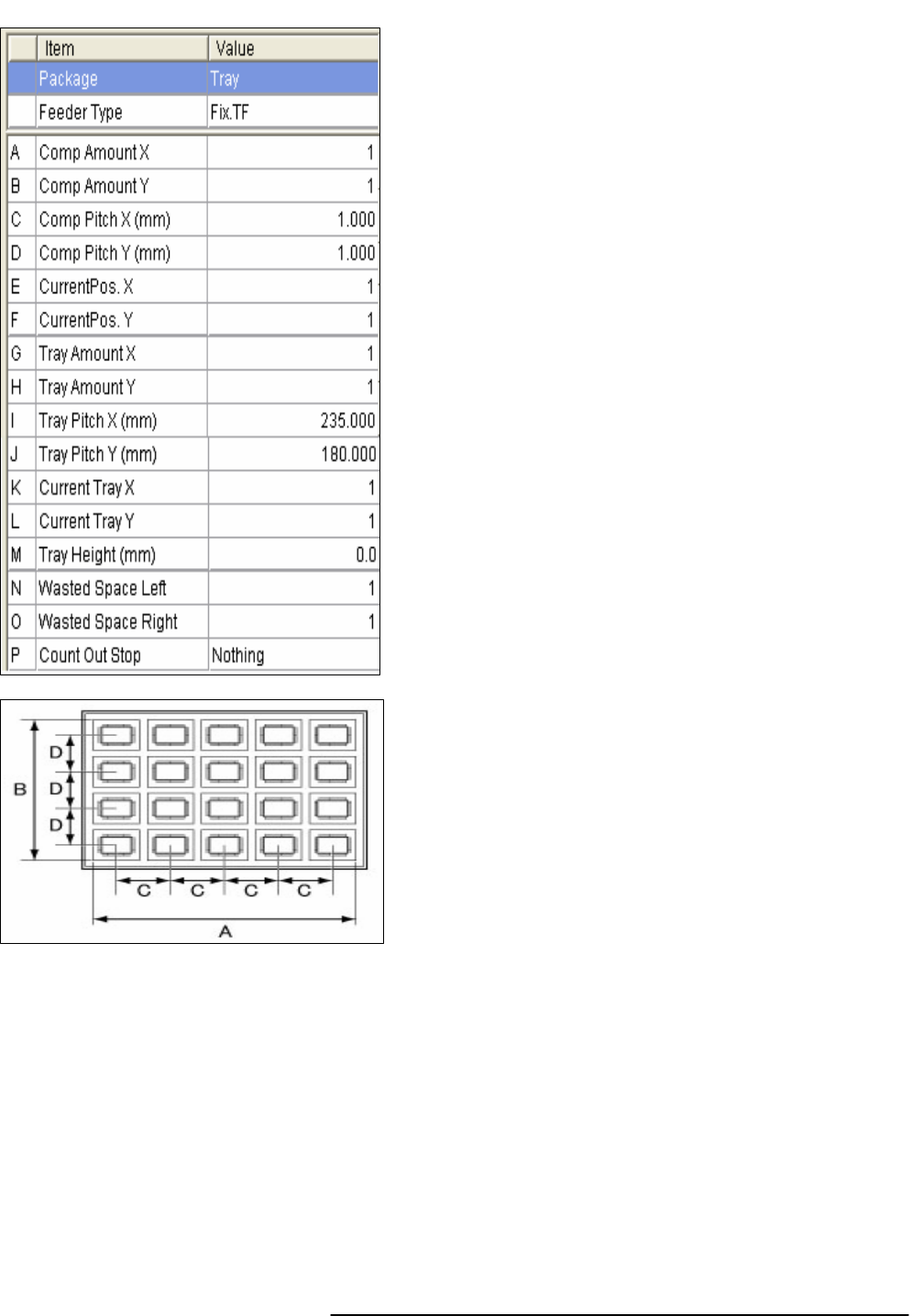
Tray 参数
值,如 Tray Height 设为 1,则机器认为该 Tray 高出默认高度 1mm 吸取材料时 Head 就自动向
上提高 1mm 的高度,设为负数则相反的吸嘴会向下多压 1mm。
Wasted Space Left:从该 Tray 设定的站位开始向左方向有多少个站位不能在安装其他 Feeder,
以便机器优化程序时自动保留空站位。
Wasted Space Right:从该 Tray 设定的站位开始向右方向有多少个站位不能在安装其他 Feeder,
以便机器优化程序时自动保留空站位。
Count Out Stop:设定料盘里的元件使用完毕后是否停机报警,“Nothing”表示不停机,直接从
第一个位置重新开始,“Stop”表示停机并报警。
这里讲述 Tray 参数里 Fix Tray 为例
Package
、
Feeder Type:参见“Basic”一节讲述。
Comp Amount X:同一个 Tray 盘中沿 X 方向元件的
个数(如左图中为 5)。
Comp Amount Y:同一个 Tray 盘中沿 Y 方向元件的
个数(如左图中为 4)。
Comp Pitch X:沿 X 方向相邻两个元件之间的间距。
Comp Pitch Y:沿 Y 方向相邻两个元件之间的间距。
Current Pos. X:当前吸取的元件在料盘中沿 X 方向
的位置,其数值用材料个数表示。。
Current Pos. Y:当前吸取的元件在料盘中沿 X 方向
的位置,其数值用材料个数表示。
Tray Amount X:在机器 Tray 盘上沿 X 方向的料盘
的个数。
Tray Amount Y:在机器 Tray 盘上沿 Y 方向的料盘
的个数。
Tray Pitch X:在 Manual Tray 上沿 X 方向相邻两个
料盘之间的间距。
Tray Pitch Y:在 Manual Tray 上沿 Y 方向相邻两个
料盘之间的间距。
Current Tray X:当前使用的料盘沿 X 方向的位置。
Current Tray Y:当前使用的料盘沿 Y 方向的位置。
Tray Height:设定吸取材料时 Head 下降高度的补偿