NXT-II 系统手册.pdf - 第401页
QD142-06 8. NXT-2 软件工具 NXT II 系统手册 381 8.6.1 模组 CPU 版本更新之后 需要以下的作业。 a. J ob 传输 b. 校正的重新测定指示 c. 模组功能设定 备注 )在更换 CPU 箱进行了版本更新后,也需要进行 [ 矩阵数据的注 册]和[ 料站倾斜数据 的注册 ]。关于这些作业请参照辅助软件操作手册 [6. 固有值的操作 ] 和 [12. 料站倾 斜测定 ]。 除此以外, 请确认贴装工作头…
8. NXT-2 软件工具 QD142-06
380 NXT II 系统手册
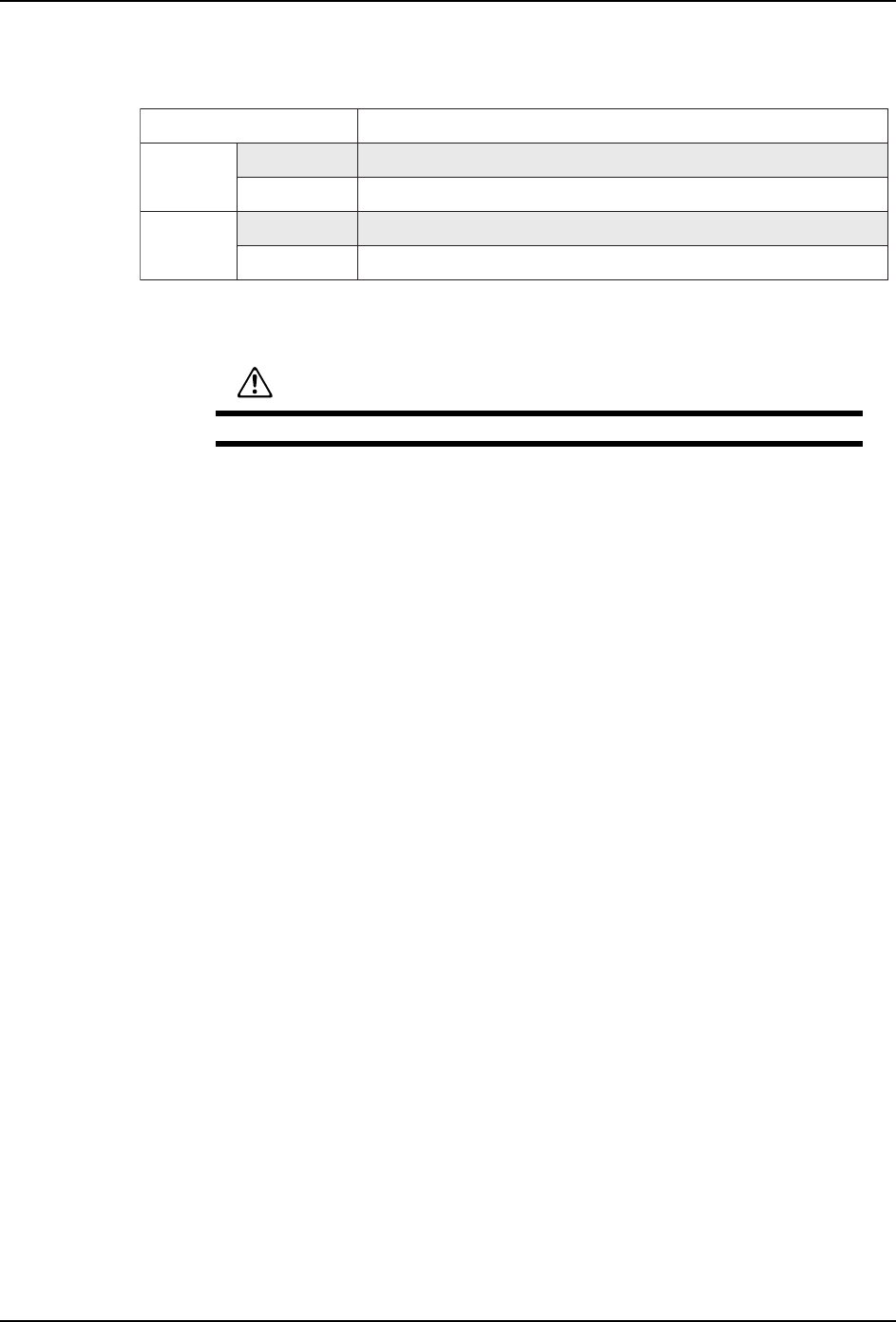
11.单击 [...],选择版本更新项目的 bin 文件 (根据机器所选择的文件会不同。请参照下
表。)选择版本更新的单元的文件后单击 [ 打开 ] 时,路径和文件显示在文本框内。
备注 )此处,请选择 (*1)的文件。
12.单击 [ 安装 ] 后,将文件安装到对象 CPU 中。安装结束后,显示出信息。
13.单击 [OK],关闭信息框。
14.将机器的电源 OFF。
15.将纽子开关返回到向下。
16.拆下交叉以太网电缆,再次连接原来的电缆。
17.将 PC 的 IP 地址返回到原来的数值。
注意
bin 文件选择错误时,进行安装后会导致 CPU 不启动。
6<66
ᅝ㺙ⱘᇍ䈵
ᑻ
000 1;7?)XML,QVW?)XML?6\VWHP?3URJUDP?6\VWHP?%DVHELQ
1;7?)XML,QVW?)XML?6\VWHP?3URJUDP?6\VWHP?0RGXOHELQ
1;7?)XML,QVW?)XML?6\VWHP?3URJUDP?6\VWHP?
0RGXOHELQ
0RGXOHELQ
1;7?)XML,QVW?)XML?6\VWHP?3URJUDP?6\VWHP?
%DVHELQ
%DVHELQ
00
㒘
0606
00
䗝ᢽⱘELQ᭛ӊ

QD142-06 8. NXT-2 软件工具
NXT II 系统手册 381
8.6.1 模组 CPU 版本更新之后
需要以下的作业。
a. Job 传输
b. 校正的重新测定指示
c. 模组功能设定
备注 )在更换 CPU 箱进行了版本更新后,也需要进行 [ 矩阵数据的注册]和[料站倾斜数据
的注册 ]。关于这些作业请参照辅助软件操作手册 [6. 固有值的操作 ] 和 [12. 料站倾
斜测定 ]。
除此以外,请确认贴装工作头上没有安装着吸嘴和机器内没有电路板。将机器的主开关设定
在 ON 之后,请进行以下的作业。
1. 请确认对象模组的序列 No.。
2. 请从 Fuji Flexa 向模组传输 Job。如果别的模组正在生产中,请作为预约 Job 传输,在
机器上切换 Job。
3. 在吸嘴置放台中请安装治具吸嘴,指定校正的重新测定。详细请参照辅助软件操作手册
[6.10 如何指定校正的重新测定 ]。
4. 当按下操作面板的 START 按钮后,就会开始自动校正。
备注 )该操作在主开关 ON 之后,经过 30 分钟以上后请执行。因为元件相机降温需要时间。
5. 如果按照手动最终修正进行精度补正时,请实施机上 PAM,算出最终修正。详细请参照
NXT-2 机械手册的 [9.1 机上 PAM (测定贴装精度)]。
6. 请重新设定辅助软件的模组功能设定。

8. NXT-2 软件工具 QD142-06
382 NXT II 系统手册
8.7 MotionToolMini
使用这个软件时可以显示伺服计数位置,能够更新 NXT-2 机器的伺服参数及复位到原位置。
8.7.1 MotionToolMini 的安装
使用这个软件时,有必要预先将这个软件安装到 PC 上。
1. 将 CD-ROM 插入 CD-ROM 硬驱中,从资源管理器中启动 CD-ROM。
2. 双击 [NXT] 后双击 [Tool],打开有安装程序的文件夹。
3. 双击 MotionToolMini.exe,开始安装处理。
4. 单击 [ 下一步 ]。
5. 根据需要在指定软件所安装的目录后,单击 [ 下一步 ]。
6. 单击 [ 下一步 ] 后,安装软件,显示最后的步骤。
7. 单击 [ 结束 ],结束安装处理。
8.7.2 MotionToolMini 的开始
1. 单击 [ 开始 ] 后,指向 [ 程序 ],[Motion Tool Mini]。当选择 [MotionTool (Mini)]
后,就会显示 [MTMINI] 对话框。
2. 将连接的基座的 IP 地址输入到主文本框中后,输入模组号码。
3. 单击 [Connect] 后,显示出主对话框。
8.7.3 伺服位置的显示
在进行伺服位置的显示前,有必要将控制用、工作头用以及伺服用电源 ON。结束校正后,进
行生产的开始 / 停止,将这些电源 ON。不能开始生产时,使用 I/O 监视器将这些电源强制
性变为 ON。
1. 启动 MotionToolMini.exe,连接到需要显示伺服位置的模组上。
2. 单击 [Wake],显示出 [Wake Setting] 对话框。
3. 单击 [OK] 后,尝试伺服的启动。有时启动伺服要花费一分钟。启动伺服后,脉冲显示伺
服位置。
8.7.4 转储文件的接收
1. 启动 MotionToolMini.exe,连接到接收转储文件的模组上。
2. 单击 [Dump],显示出 [ 另存为 ] 对话框。
3. 指定转储文件的保存处的目录和文件名后,按下 [ 保存 ] 时,用指定的文件名保存从伺
服系统中取得的文件。
8.7.5 跟踪文件的接收
1. 开始 MotionToolMini.exe,连接到取得跟踪文件的模组上。
2. 单击[跟踪],显示出[另存为]对话框。
3. 指定跟踪文件的保存处的文件夹名和文件名后,按下 [ 保存 ] 时,用指定的文件名保存
从伺服系统中取得的文件。