YS24X_Ope_K.pdf - 第61页
1-22 1 6. 축구성 장비 의Se r vo 모터제 어에의 한축구 성및동작방향에대해설 명합니 다 . ■ 듀얼 스테 이지 플러스 방향 마이너스 방향 YB축 YA축 XA축 XB축 U2축 W1축 (W1축) W2축 축구성 RL(우측 흐름)의 장비 정면에서 본 예 RA1축 RB1축 RA2축 RB2축 ■ 헤드부 ■ 주축부 ■ 반송부 A테이블 헤드 유니트 B테이블 헤드 유니트 ZB1 ZB…
1-21
1
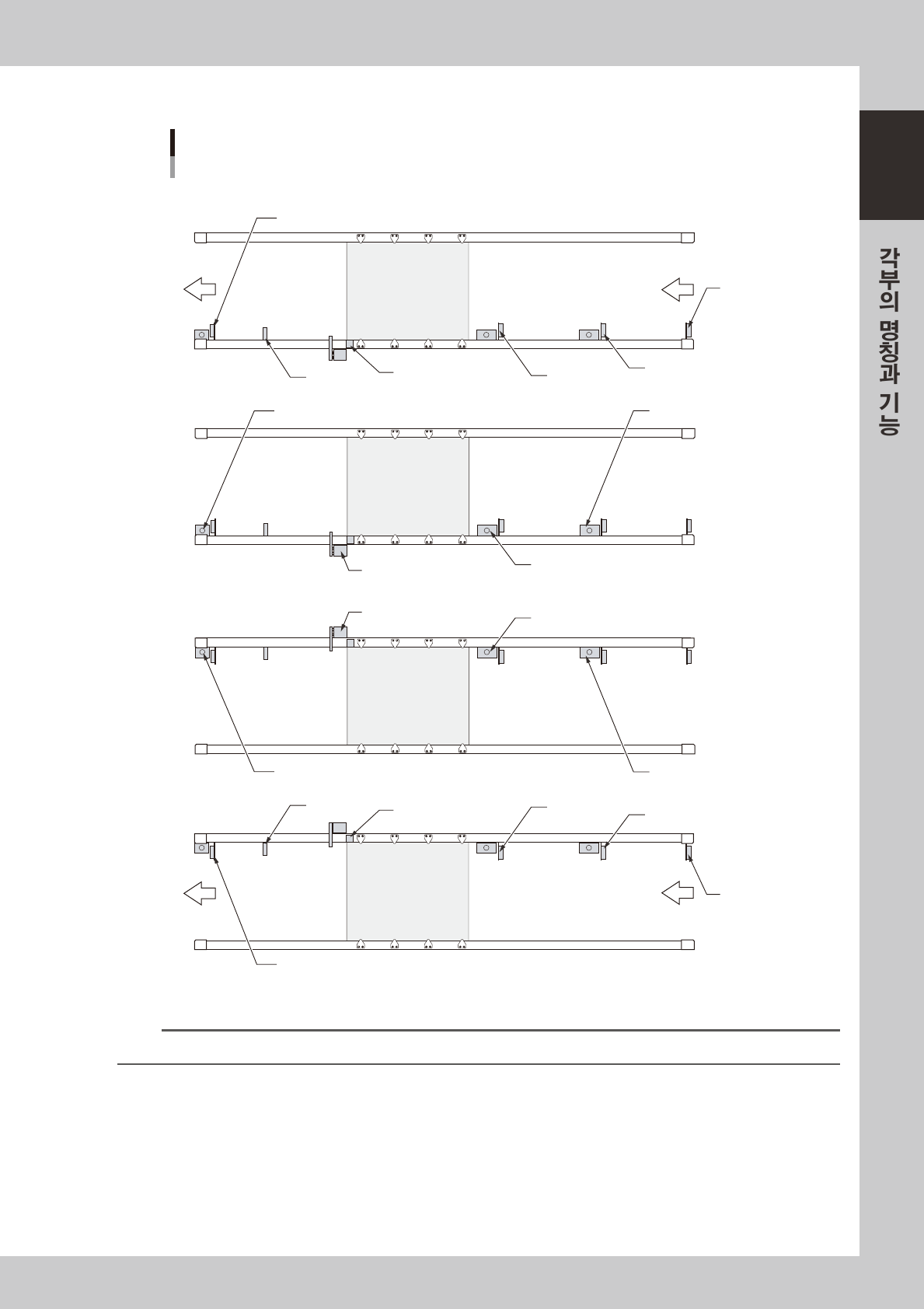
■ 싱글 레인 / 듀얼 레인
센서의 배치
■ 레인1
■ 레인2
입구검지
N01008C5
출구검지
N01008D3
대기위치 검지1
N01008C0
대기위치 검지2
N01008C7
실장 기판검지1
N01008C1
워크 아웃
N0100903
출구 스톱퍼
센서없음
대기 스톱퍼1
N01008C3
대기 스톱퍼2
N01008E4
실장 스톱퍼1
N01008D5
입구검지
N01008C6
출구검지
N01008D4
대기위치 검지1
N01008D0
대기위치 검지2
N01008E1
실장 기판검지1
N01008D1
워크 아웃
N0100917
출구 스톱퍼
센서없음
대기 스톱퍼1
N01003C4
대기 스톱퍼2
N01008E5
실장 스톱퍼1
N01008D7
27117-L4 -10
n
요점
싱글 레인의 경우는 , 상기 그림의 레인 1 만 해당됩니다 .
1-22
1
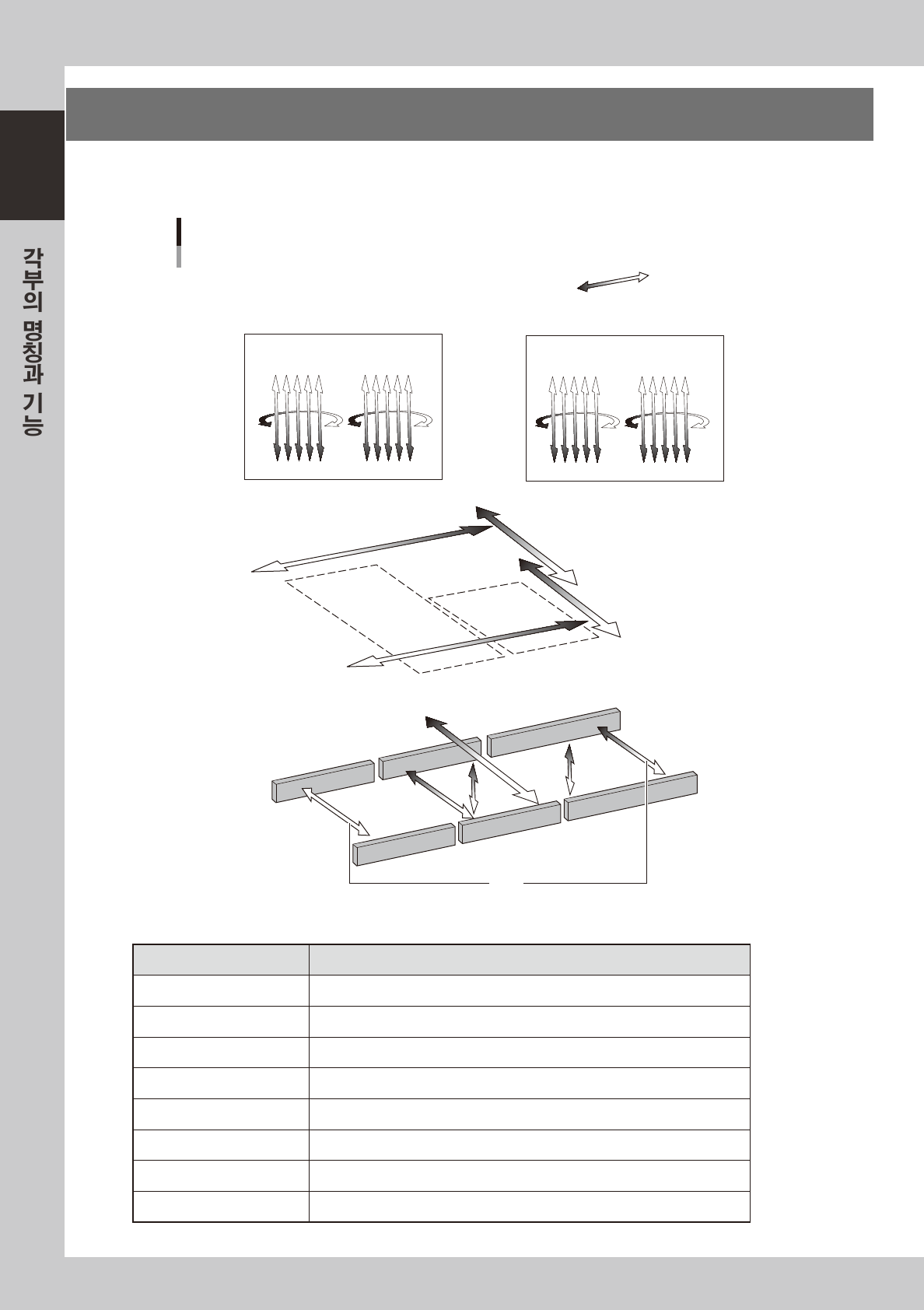
6. 축구성
장비의Servo 모터제어에의한축구성및동작방향에대해설명합니다 .
■ 듀얼 스테이지
플러스 방향
마이너스 방향
YB축
YA축
XA축
XB축
U2축
W1축
(W1축)
W2축
축구성
RL(우측 흐름)의 장비 정면에서 본 예
RA1축
RB1축
RA2축
RB2축
■ 헤드부
■ 주축부
■ 반송부
A테이블 헤드 유니트
B테이블 헤드 유니트
ZB1ZB10 ZB6 ZB5
ZA10ZA1 ZA5 ZA6
PU1축
PU2축
스테이지2
스테이지1
연동
27118 - L4- 00
■ 각 축의 기능
축명칭 기능
•
역할
XA,XB 축 테이블상에서컨베이어의기판반송방향과평행으로헤드를이동합니다 .
YA,YB 축 컨베이어의기판반송방향과직각방향으로헤드를이동합니다 .
U2 축 컨베이어 (W2) 를Y 축방향으로이동시킵니다 .
RA1,RA2,RB1,RB2 축 각헤드에서노즐샤프트를회전시킵니다 .
Z A1~Z A10,ZB1~ZB10 축 각헤드에서부품흡착
•
탑재헤드를상하로이동합니다 .
SCA,SCB 축 컨베이어의기판반송방향과평행하게스캔카메라를이동합니다 .
W1,W2 축 컨베이어폭을변경합니다 .
PU1,PU2 축 푸쉬업플레이트를상하로이동합니다 .
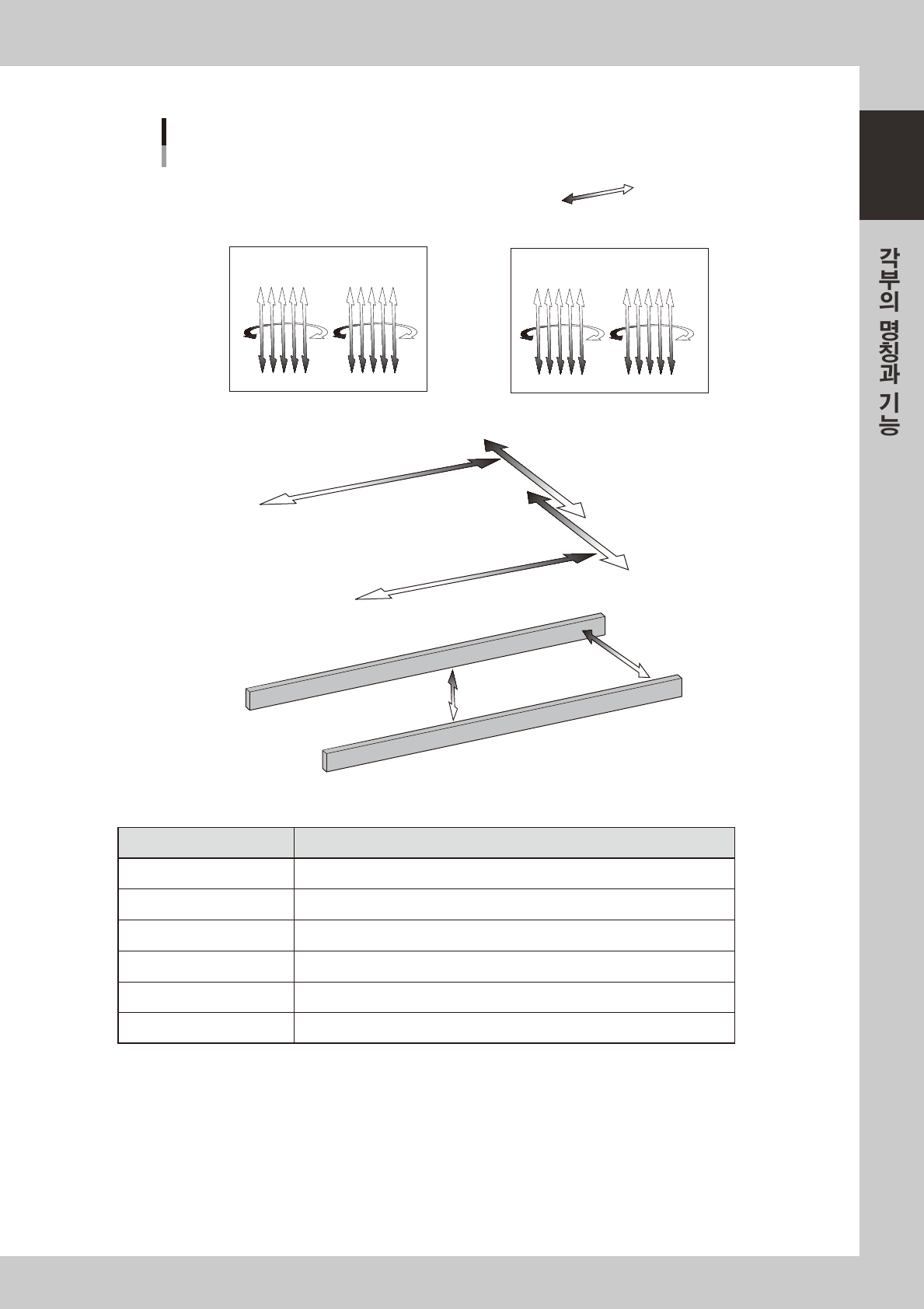
1-23
1
■ 싱글 레인
플러스 방향
마이너스 방향
W축
축구성
RL(우측 흐름)의 장비 정면에서 본 예
RA1축
RB1축
RA2축
RB2축
■ 헤드부
■ 주축부
A테이블 헤드 유니트
B테이블 헤드 유니트
ZB1ZB10 ZB6 ZB5
ZA10ZA1 ZA5 ZA6
PU축
YB축
YA축
XA축
XB축
■ 반송부
27119L 4- 00
■ 각 축의 기능
축명칭 기능
•
역할
XA,XB 축 테이블상에서컨베이어의기판반송방향과평행으로헤드를이동합니다 .
YA,YB 축 컨베이어의기판반송방향과직각방향으로헤드를이동합니다 .
RA1,RA2,RB1,RB2 축 각헤드에서노즐샤프트를회전시킵니다 .
Z A1~Z A10,ZB1~ZB10 축 각헤드에서부품흡착
•
탑재헤드를상하로이동합니다 .
W축 컨베이어폭을변경합니다 .
PU 축 푸쉬업플레이트를상하로이동합니다 .