DECAN_S2_Administrator′s_Guide(Chi_Ver4.6)_Web.pdf - 第448页
14-84 Advanced Chip Shooter DECAN S2 Administrator’s Guide Position> 位置。 6. 单击 <Get> 键, 把当前位置保存到 <Beam Position> 。 7. 在 <Gantry> 组合框选择 Gantry2 后, 按照和 Gantry1 相同的方式实行校准。 8. 单击 <Update> 键保存设定值。 9…
14-83
Machine Calibration
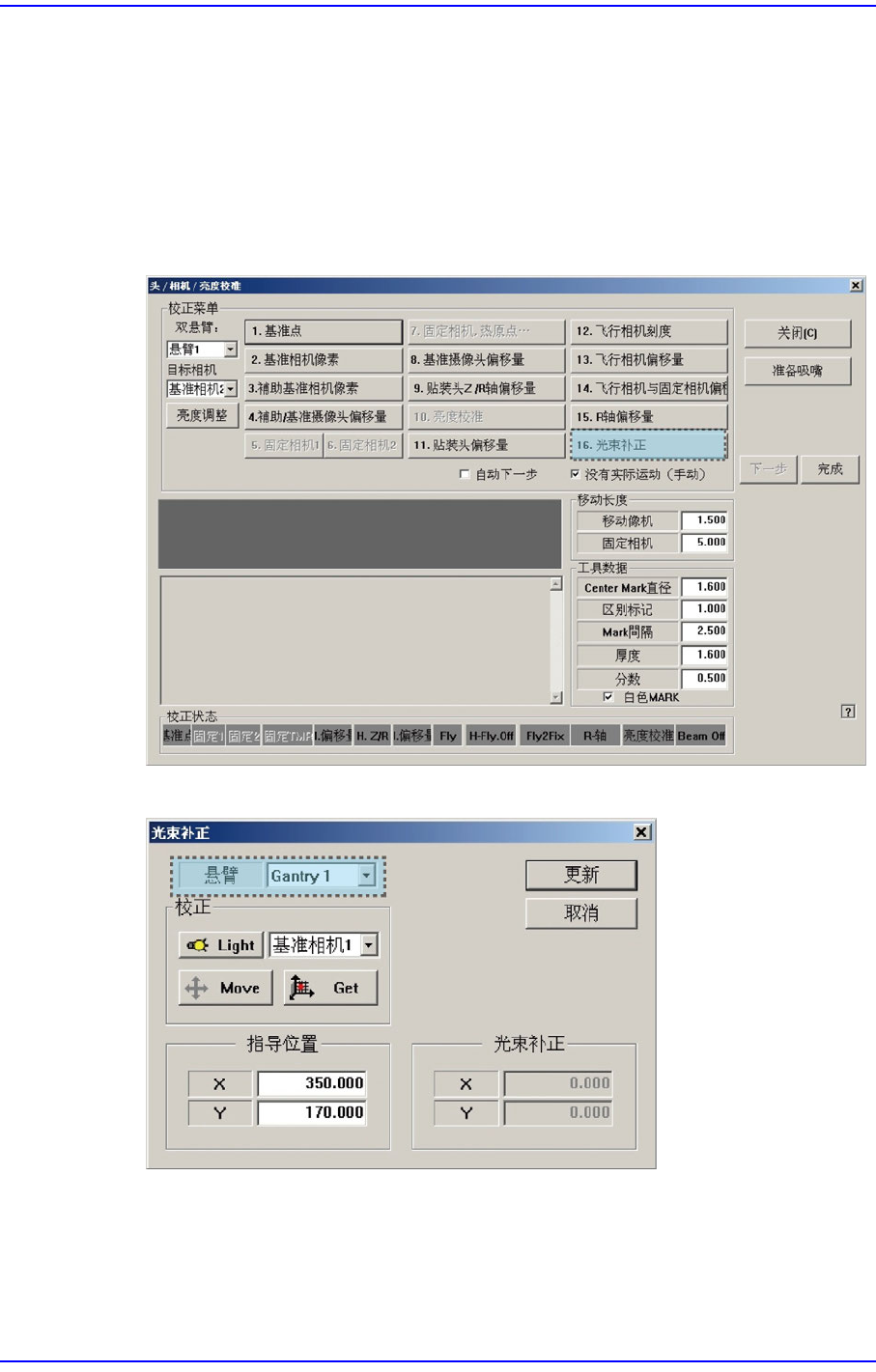
14.3.11.9. Beam Offset Calibration
该校准作业测量基准相机 (Fiducial Camera)中心与悬臂的Beam Sensor之间的距离。
需要测量Beam Offset时,先在系统菜单的<Head>选项卡选择需要使用的 Beam
Sensor。
下面是Beam Offset的校准过程。
1. 单击<16. Beam Offset>键,实行Beam Offset对话框。
2. 选择需要校准的悬臂。
3. 示教工具选择Fid Cam2(或Fid Cam4)后,利用示教框(jog box)把X-Y轴移动到
可以识别位置的领域(可以利用SMVision判别的地点)。
4. 单击<Get>键,把当前位置保存到<Teaching Position>。
5. 示教工具选择Beam1(或Beam2),然后利用示教框(jog box)移动到<Teaching
14-84
Advanced Chip Shooter DECAN S2 Administrator’s Guide
Position>位置。
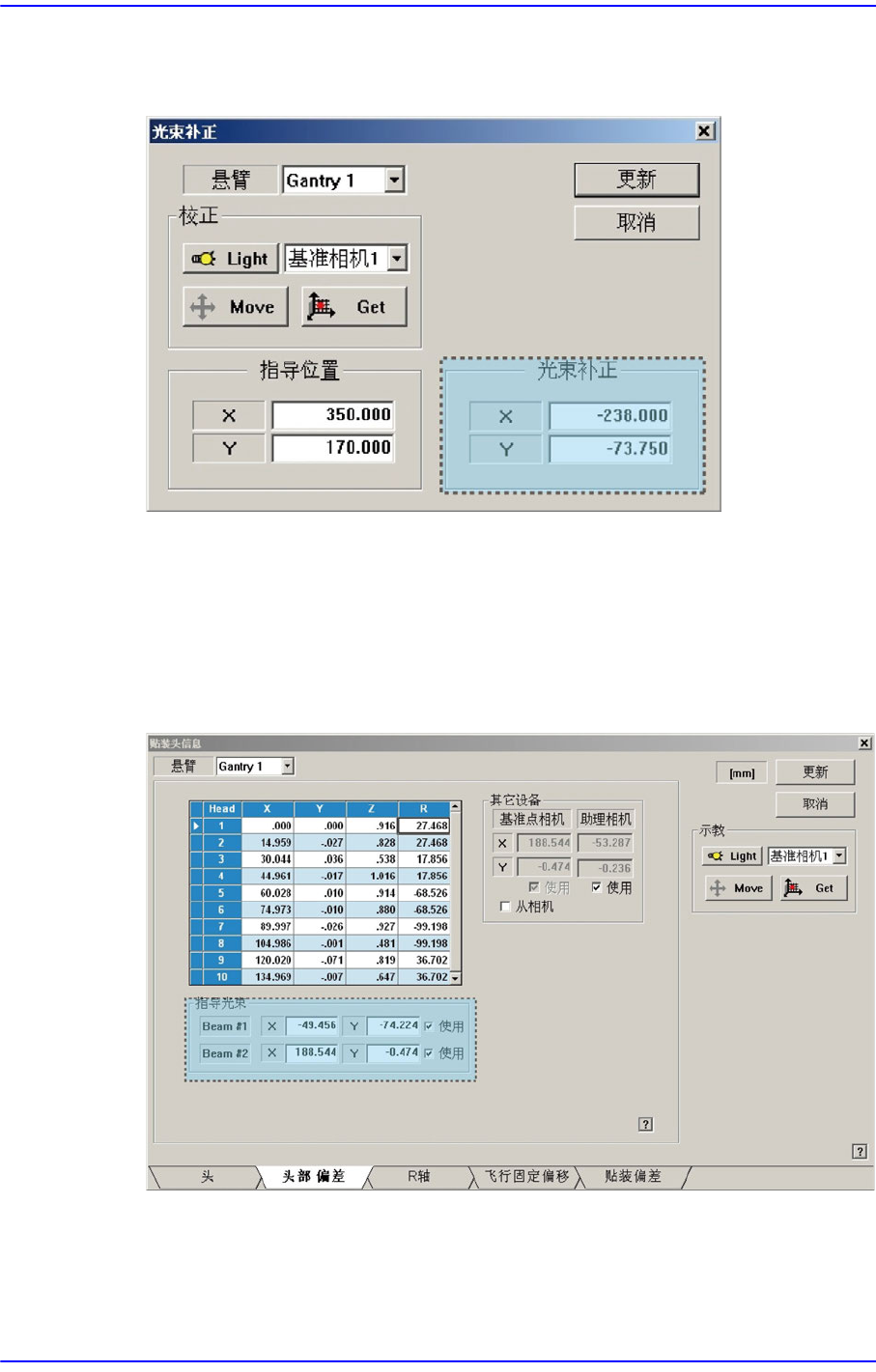
6. 单击<Get>键,把当前位置保存到<Beam Position>。
7. 在<Gantry>组合框选择Gantry2后,按照和Gantry1相同的方式实行校准。
8. 单击<Update>键保存设定值。
9. 结果值可以在System Setup菜单的Head Offset对话框查看。
10. 在<Gantry>组合框选择 Gantry2后,按照和 Gantry1相同的方式实行校准。
结果值可以在System Setup菜单的R Axis对话框查看。
14-85
Machine Calibration
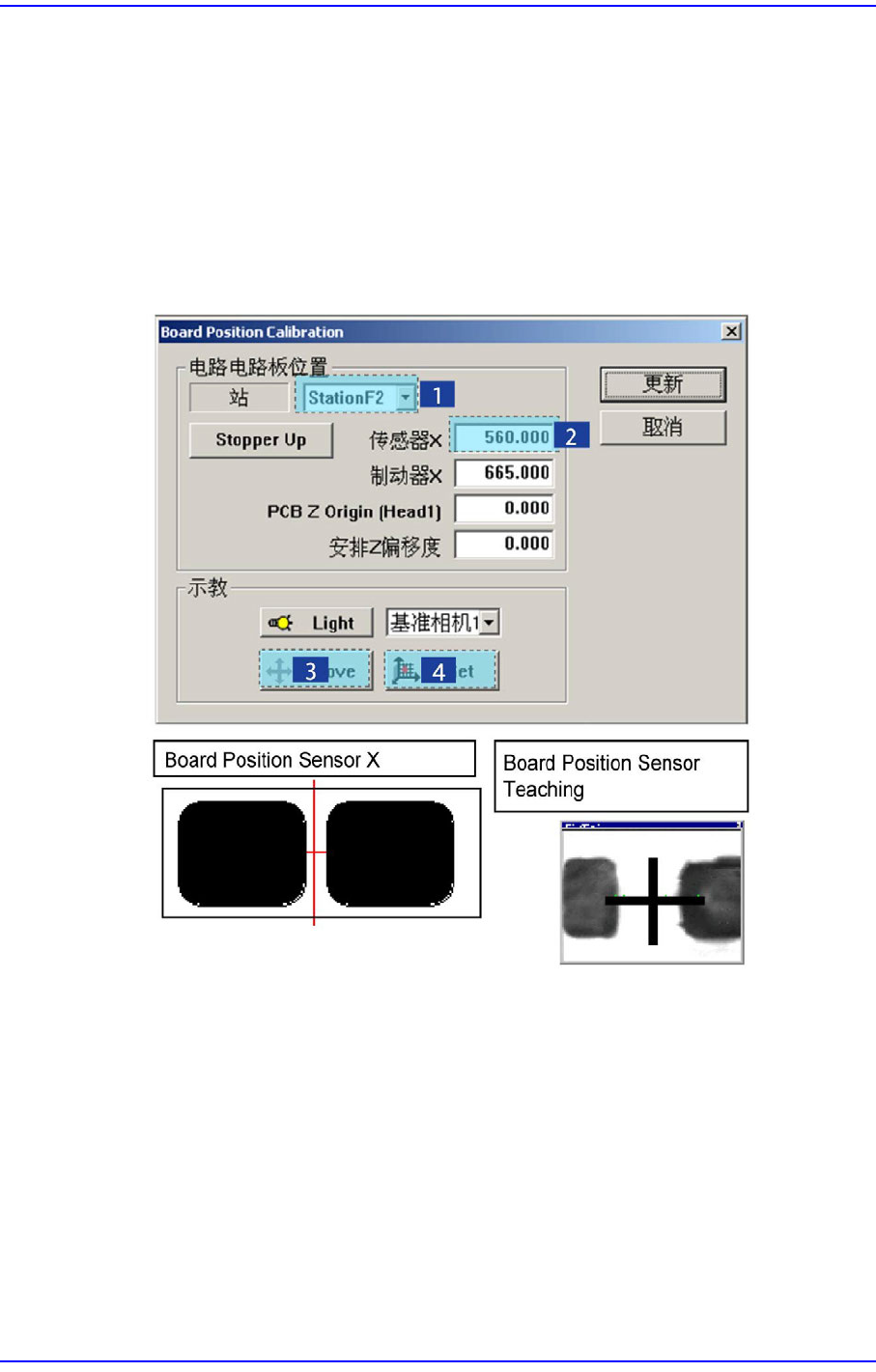
14.3.12. Board Position Calibration
示教Conveyor贴装领域的Stopper位置和Sensor的X位置。
以下是对Board Position进行Calibration的过程。
1. 用鼠标选择<Sensor X> 编辑箱,点击 <移动>按扭,把示教相机移动到Sensor X
位置。
2. 利用示教盒示教正确的位置。然后点击示教盒的‘Enter’ 按扭输入正确的Sensor
X坐标值
3. 利用鼠标点选择<Stopper>组合框后选择将要示教的Stopper。然后点击<示教>
按钮,相应的Stopper位置示教值自动输入到<位阻挡器 X>编辑框。
4. <止挡块上/下>按钮,先Up Stopper后再利用示教框(Teaching Box)请准确示教
Stopper位置。
5. <Get> 按钮 再利用示教框 Stopper X的 板定位传感器 X坐标值。 请准确示教
StationF2, StationR2位置。.