M3plus_OperationManual_j.pdf - 第87页
3- 22 3 4. 部品情報を作る 部品名 コメント 補正グループ 補正タイプ 使…
3-21
3
3. 基板情報を作る
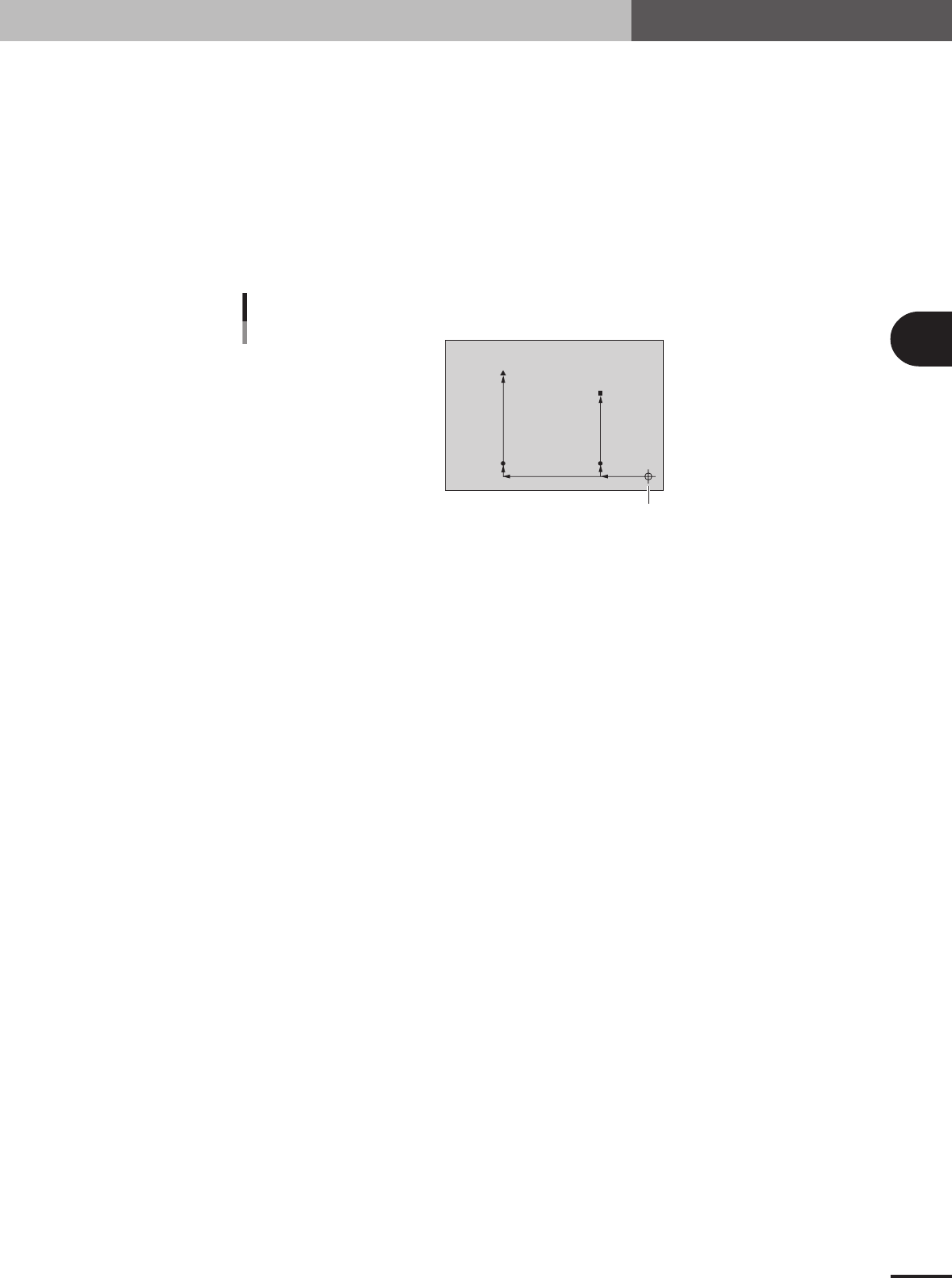
3. 4 点フィデューシャル
4 点フィデューシャル機能とは、基板上の 4 個のフィデューシャルをビジョン認識した結果から
部品搭載の位置補正をする機能です。次のような場合に適しています。
・条件に適した 4 点以上のフィデューシャルマークを持つ基板
・大型基板
・伸縮や歪みを生じやすい材質(紙フェノール、紙、ガラエポ、フレキシブルなど)基板
データの設定方法は基本的にポイントフィデューシャルやローカルフィデューシャルと同じです。
しかし、4 点フィデューシャルではフィデューシャル座標が 4 点あるため、4 点フィデューシャ
ル1組につき 2 行 (4 ローカルメインと 4 ローカルサブ) のフィデューシャルデータ領域が必要に
なります。
(-50, 10)
(-200, 10)
(-50, 150)
(0, 0)
(-200, 200)
第3マーク
基板原点
4点フィデューシャルの例
第2マーク
第4マーク
第1マーク
22413-5E-10
3-22
3
4. 部品情報を作る
部品名
コメント
補正グループ
補正タイプ
使用ノズル
部品供給形態
フィーダータイプ
(送りピッチ)
廃棄方法
リトライ回数
コンベアX軸速度
データベース番号
(ライブラリ名)
フィーダーセット位置
フィーダー位置計算
X、Y
吸着角度
吸着高さ
吸着タイマー
吸着スピード
XYスピード
吸・装着真空センサーチェック
吸着真空圧
吸着タイミング
吸着動作
軸停止
装着高さ
装着タイマー
装着スピード
XYスピード
吸・装着真空センサーチェック
装着真空圧
装着動作
軸停止
(補正グループ)
(補正タイプ)
外形寸法XY
外形寸法部品厚さ
検出ライン位置
検出ライン幅
リード本数
リードピッチ
反射リード長
etc.
(部品供給形態)
(フィーダータイプ)
部品個数
現在個数
カウント終了時停止
etc.
認識装置透過・反射
特殊照明設定 メイン・同軸・サイド
部品照明レベル
しきい値自動決定
部品しきい値
公差
リード検出範囲
形状基準角度
部品識別輝度
マルチマックス
代替部品番号
部品グループ番号
最適化の実行
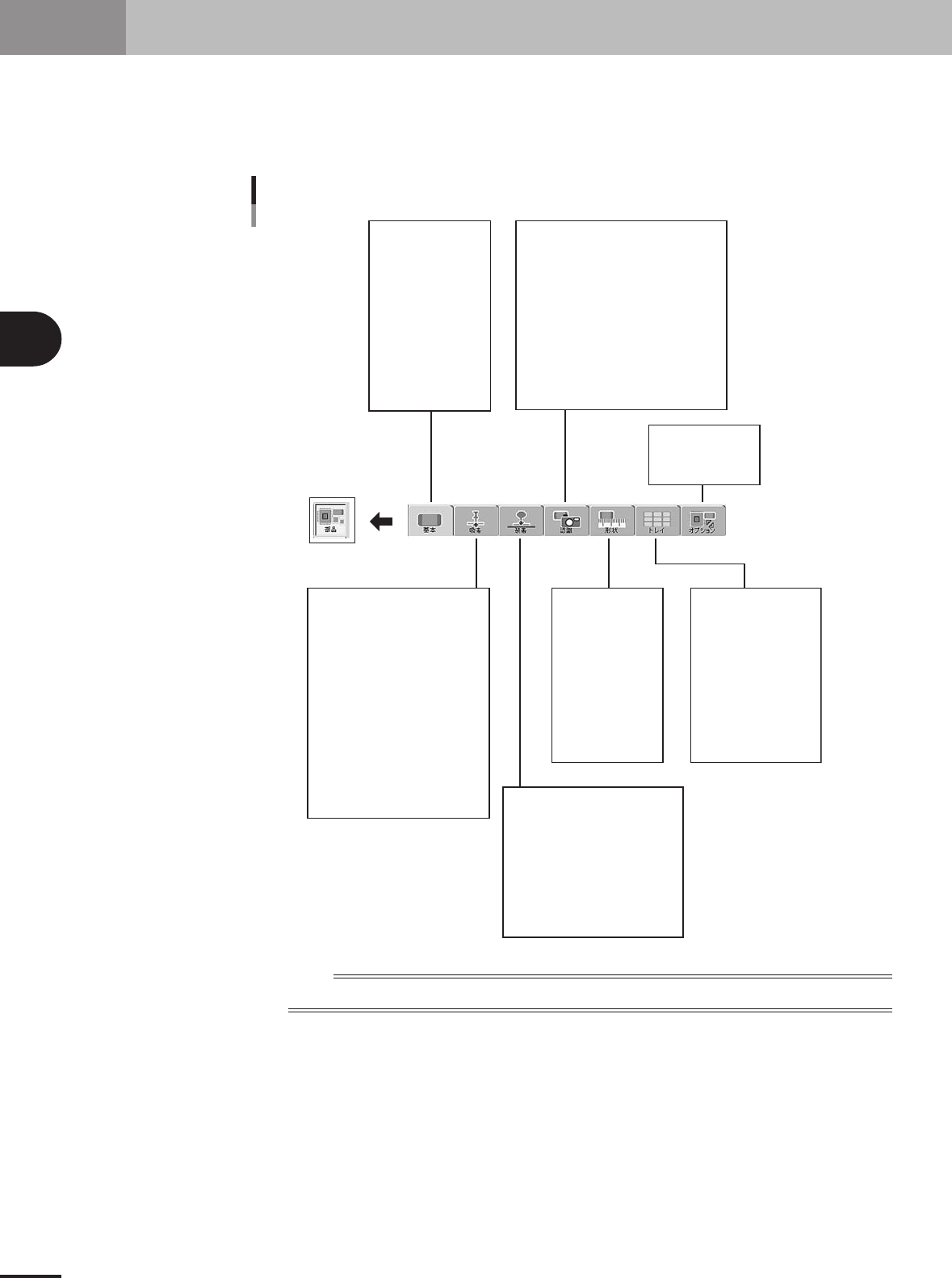
部品パラメーターの構成
22416-E5-10
参考
表示されるパラメーターは、選択した部品や部品供給形態によって異なります。
3-23
3
4. 部品情報を作る
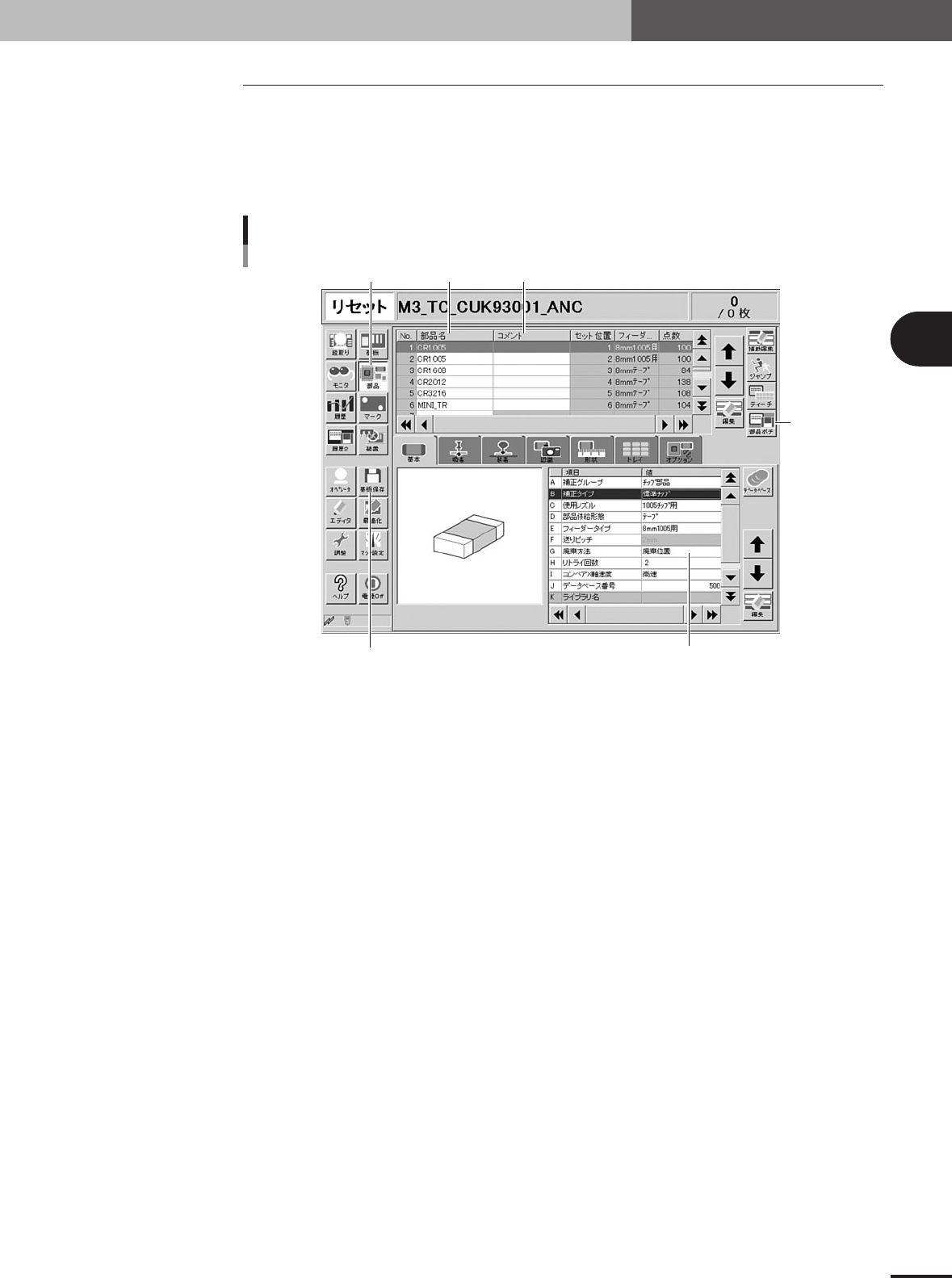
4.1 作成手順
ボタンエリアの[部品]ボタンを押すと、下図のように部品情報画面が開きます。ここでは、画面上
部のデータ No. に「部品名」や「コメント」を入力し、下部のリストに各種パラメーターを設定し
ます。
1
Step 1 Step 2 Step 3
Step5
Step 4
Step 7
部品パラメーター画面
26411-E5-20
2
「部品名」にテープリール、あるいは部品本体に印刷されている名称を 20 字以内の半角
英数字で入力します。スペースは使用できません。
3
必要に応じてコメントを入力してください。 (入力しなくても構いません。)
4
「基本」「吸着」「装着」「認識」「形状」タブなどを選びながら、画面の下部のリストにパ
ラメーターを設定してください。
5
設定したパラメーターの確認および調整作業(「部品ポチ」と呼びます)を行います。 (本
章「4.9 部品ポチ」を参照してください。)
6
基板上に搭載する全ての部品に対して上記の作業を行ってください。
7
[基板保存]ボタンを押してデータを保存してください。