bm231操作.pdf - 第57页
BM231 操作手册 4.1 画面构成 E35OCC-15- 012-D0 4.1-2 4.1.2 上部共用部 上部共用部主要显示当 前的机械状态。 No 显示 状态、功能 表示在 AUTO (全自动) , SEMI (半自动)中因设备 错误之外 的原因造成的停止状态 。 因吸着错误、识别错误 而停止时,也会出现 此显示。 表示在 AUTO (全自动) , SEMI (半自 动) 中因设备 EOP 的原 因造成的停止状态。 表示在 AU…
BM231
操作手册
4.1 画面构成
E35OCC-15-012-D0
4.1-1
4.1. 画面构成
E35OCC-15-012-D0
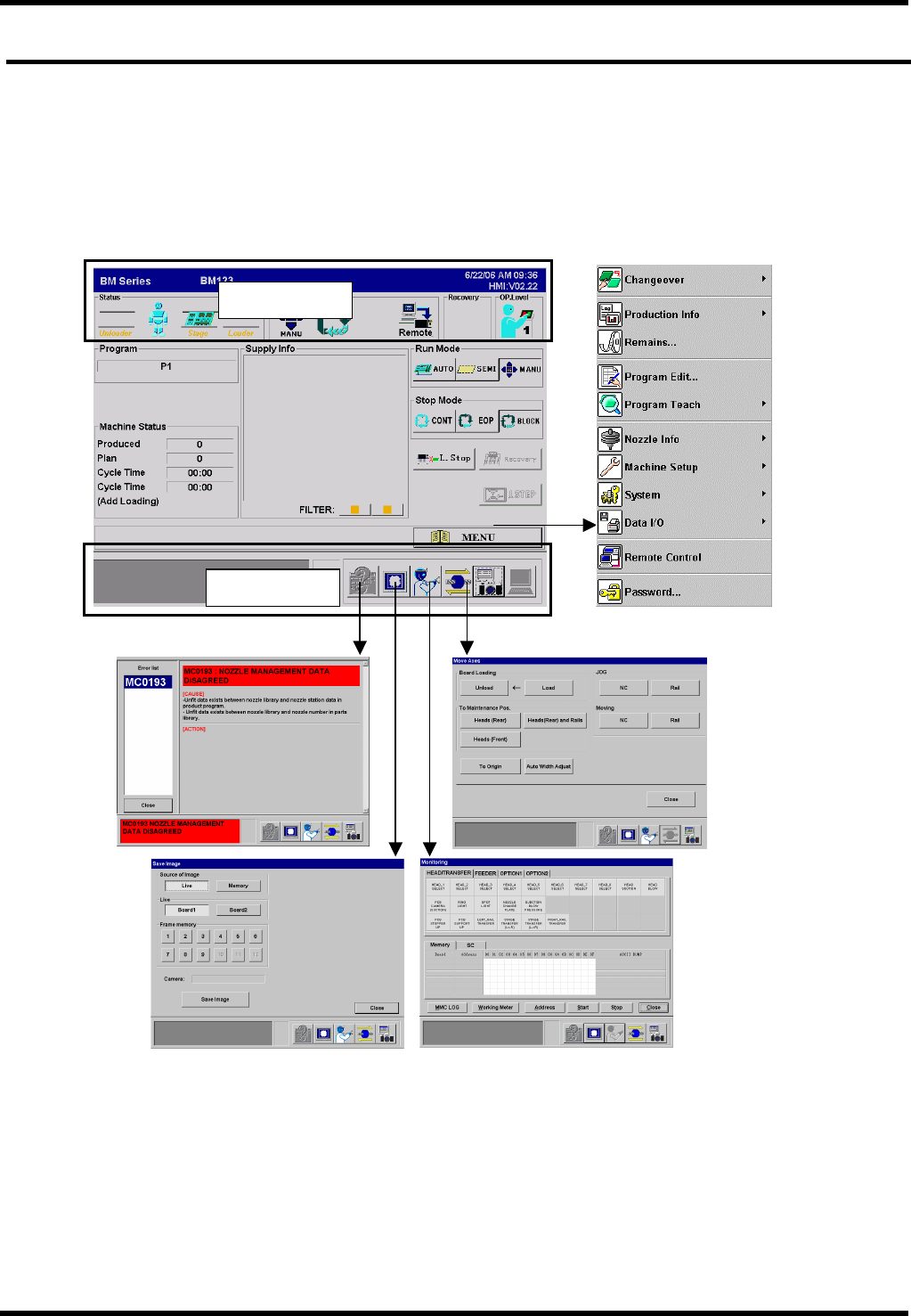
在本机上的主要操作是通过点击画面上显示的按钮来实现的。
在此对画面的构成及显示的标记的意思进行了说明。
4.1.1 构成概要
画面的上部和下部是共用部分。
通过<MENU>(菜单)按钮或下部共用部的按钮打开新画面。
上部共用部
下部共用部
BM231
操作手册
4.1 画面构成
E35OCC-15-012-D0
4.1-2
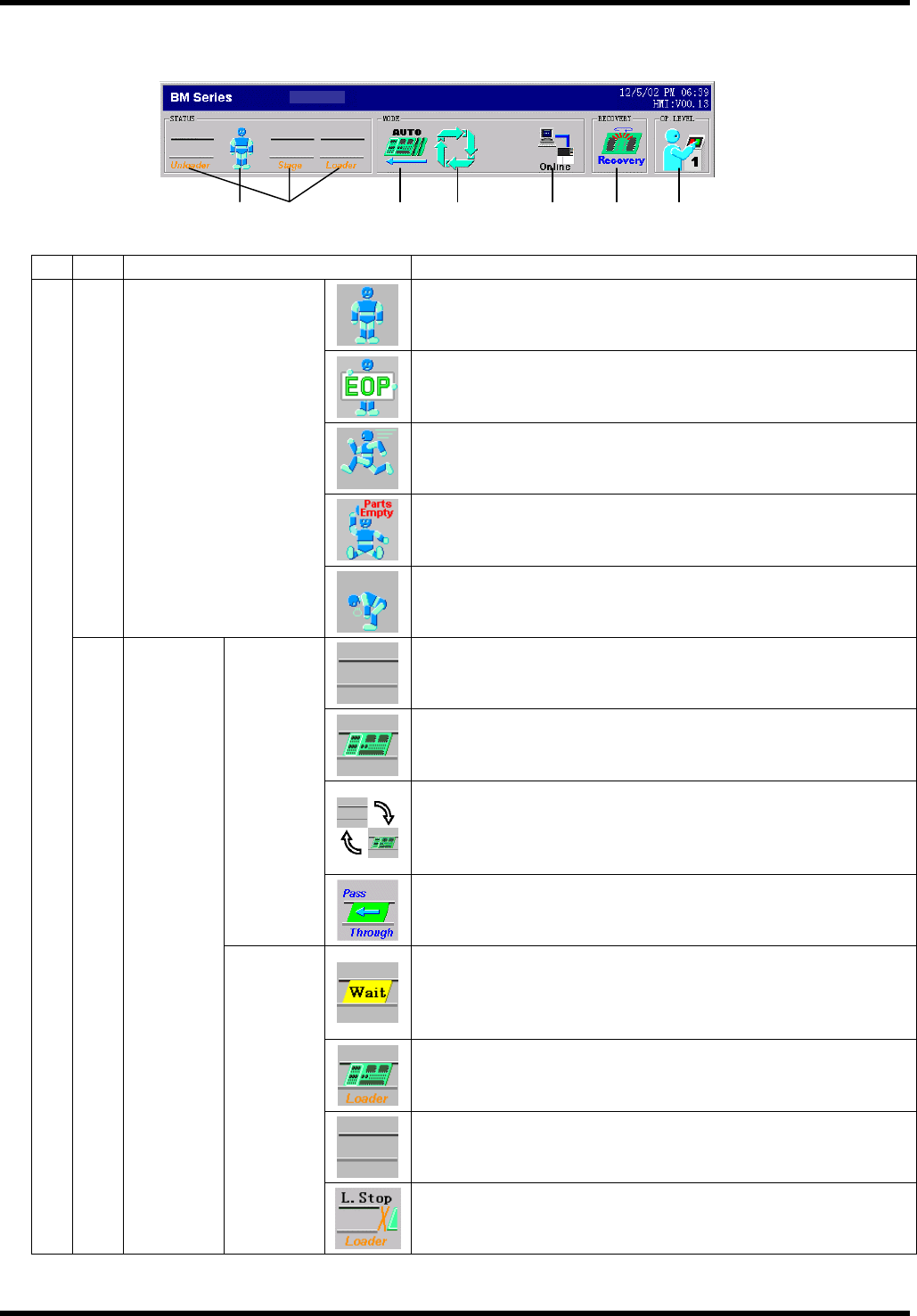
4.1.2 上部共用部
上部共用部主要显示当前的机械状态。
No
显示 状态、功能
表示在 AUTO(全自动), SEMI(半自动)中因设备错误之外
的原因造成的停止状态。
因吸着错误、识别错误而停止时,也会出现此显示。
表示在 AUTO(全自动), SEMI(半自动)中因设备 EOP 的原
因造成的停止状态。
表示在 AUTO(全自动), SEMI(半自动)中,设备处于正在
运转状态。
表示因元件用完错误或者无供料器的错误造成的停止中。
1
设备状态
表示因安全停止或元件用完错误以外的错误造成的停止。
表示无基板状态。
表示有基板状态。
表示基板搬送中。
也包括因基板搬入等待/基板搬出等待使搬送动作处于等待的状
态。
交错显示无基板及有基板。
工作台部
表示正在通过的运行状态。
表示等待基板搬入状态。
从基板搬送开始经过一定时间之后,就变成此种状态,基板搬
送等待错误计测开始。
在可搬送的状态下进行搬送。
上载导轨部有基板的状态。
上载导轨部无基板的状态。
STATUS
2
基板状態
上载导轨
部
按<L.Stop> (L.停止),使基板搬入处于停止状态。
1 2 3 4 5 6 7
BM231
操作手册
4.1 画面构成
E35OCC-15-012-D0
4.1-3
No
显示 状态,功能
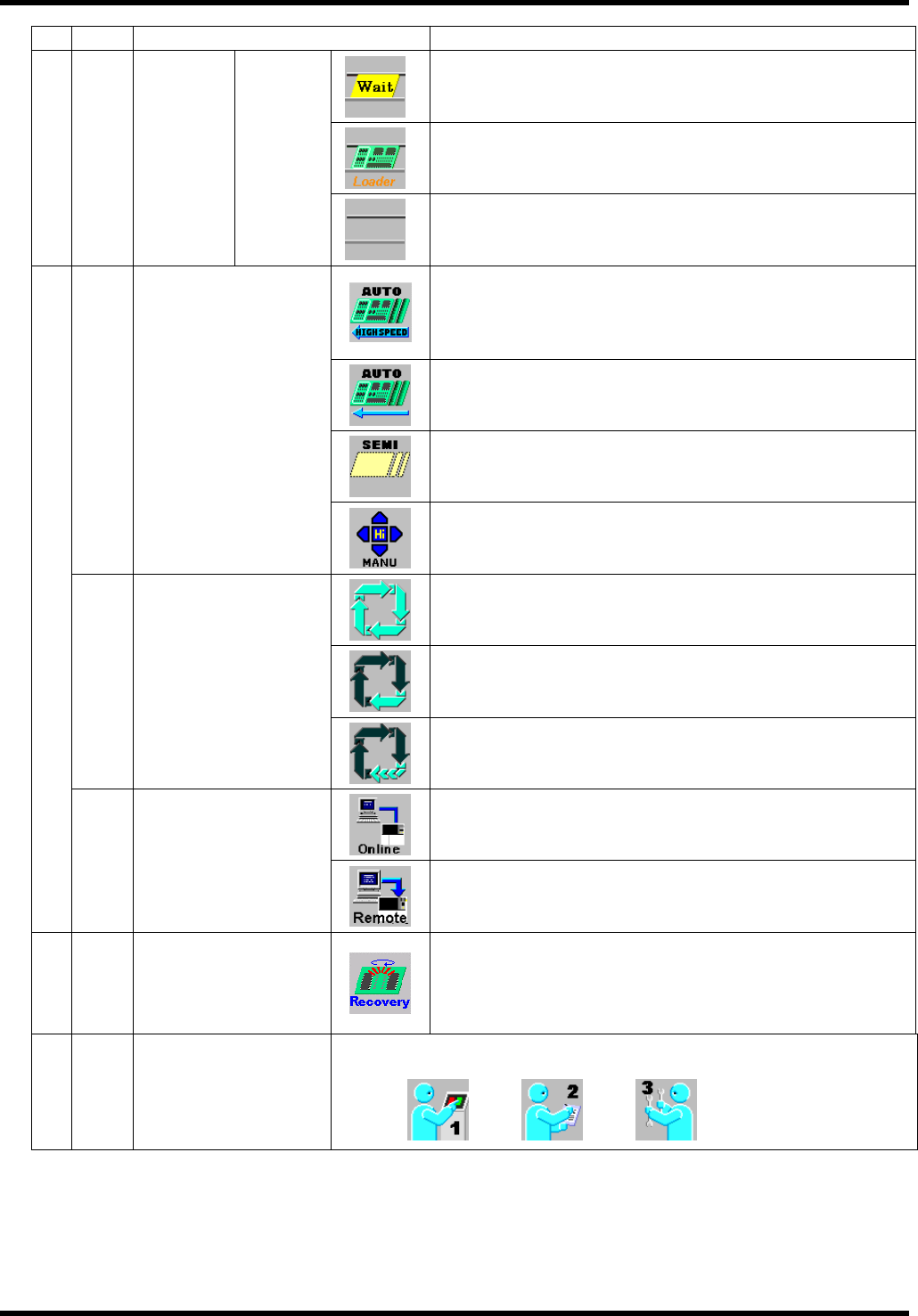
是基板搬出等待(不能从工作台部向下载导轨部搬出基板)
状态。
在可搬送状态下进行搬送。
下载导轨部有基板的状态。
STATUS
2
基板状態
下载导
轨部
下载导轨部无基板的状态。
AUTO(全自动)
是进行生产时的模式。
当运转条件的高速方式被选择为 ‘高速’ 时的显示。
没有安装吸头照相机的机器,不具备此高速方式的功能。
AUTO(全自动)
是进行生产时的模式。
当运转条件的高速方式被选择为 ‘标准’ 时的显示。
SEMI (半自动)
是进行动作确认时的模式。
不进行元件吸附。
3
运转模式
MANUAL(手动)
是进行机型切换及副操作盘上进行操作的模式。
CONT (连续动作)
只要无错误发生或操作人员的指令则程序连续运行。
EOP (End Of Program)
执行完最后一个程序后停止。
4
停止模式
BLOCK(程序块)
仅执行程序的一个程序块,就停止。
ON LINE(在线)
是进行及主机通信、数据搬送及设备管理的模式。
MODE
5
通信模式
REMOTE(遥控)
在 ON LINE 上增加,是可从主机摇控的模式。
RECOVERY
6
自动补料
机械因吸着错误而停止时显示。
<Recovery>(自动补料)有效。
因元件用完而跳过贴装时不显示。
显示当前的操作级别,要移动到上一级别,需输入密码。
OP.LEVEL
7
Operation Level
(操作级别)
LEVEL1 LEVEL2 LEVEL3