JM-50_维修保养手册.pdf - 第180页
维修调整要领书 11 - 46 11 -8- 6 步进马达驱动 器的调整 传送单元的传送 马达、自动调整基板 宽度马达及 支撑台 马达 ,使用了 步 进马达。 为了使步 进马 达正常旋转 ,需要调整步进驱动 器。 ・ 传送马达 L/ C /R (步 进马 达) 2 相步进马达驱动器 40154209 ・ AW C 传送马 达 (步 进马 达) 5 相步进马达驱 动器 HM00132000 0 11 -8-6- 1 自动调整基板 宽度马达…
维修调整要领书
11-45
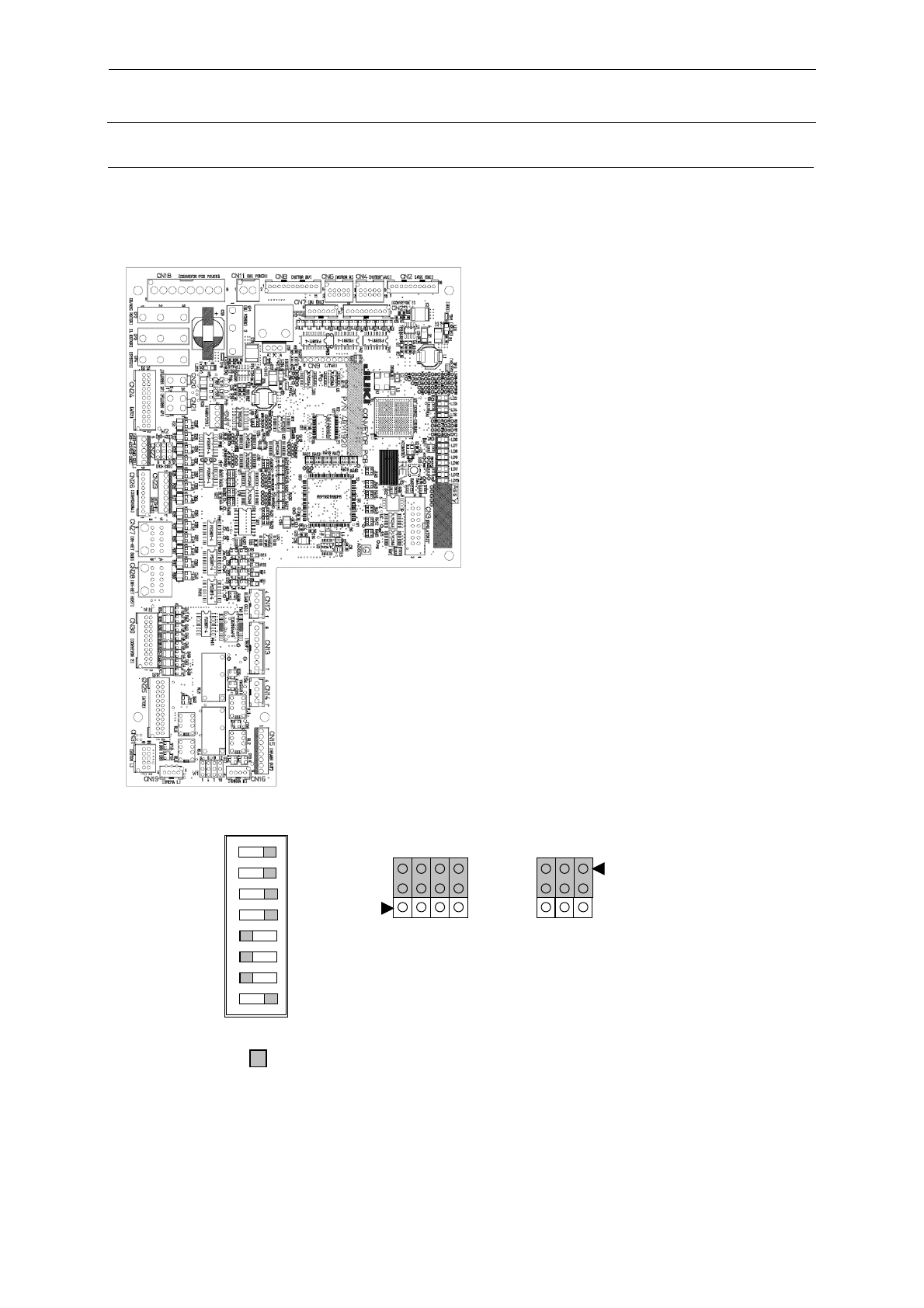
11-8-5 CONVEYOR PCB ASM (40128875)
在传送单元中使用的 CONVEYOR 基板组的跳线、DIP-SW,尽管在交纳时已设定好,但要在设置
基板组时进行确认操作。
LED 显示的意思
<电源接通确认用>
LD1(绿灯亮) : +3.3V 接通确认
LD14(绿灯亮) : +5V 接通确认
LD15(绿灯亮) : +24V 接通确认
<通信确认用>
LD2(红亮灯) : GM-NET2 通信异常
LD3(红亮灯) : 开始与 GM-NET2 主机通信
LD4(红亮灯) : GM-NET1 通信异常
LD5(红亮灯) : 开始与 GM-NET1 主机通信
图 11-8-5-1 CONVEYOR PCB ASM 外观
部分为开关的设定位置及跳线的跨接安装位置。
图 11-8-5-2 CONVEYOR 基板组的 DIP-SW
【更换后的调整项目】
请通过主机软件的[维护] -[MS 参数] -[版本升级] -[版本升级- CNVR] 对基板的固件版本进行升
级。
O
N
1
2
3
4
5
6
7
8
SW1
1
3
W2
4
6
7
9
12
10
W1
9
7
6
4
3
1
维修调整要领书
11-46
11-8-6 步进马达驱动器的调整
传送单元的传送马达、自动调整基板宽度马达及支撑台马达,使用了步进马达。
为了使步进马达正常旋转,需要调整步进驱动器。
・ 传送马达 L/C/R(步进马达) 2 相步进马达驱动器 40154209
・ AWC 传送马达(步进马达) 5 相步进马达驱动器 HM001320000
11-8-6-1 自动调整基板宽度马达驱动电流调整
<调整步骤>
① 调整前要确认已进行『DC 电源输出电压调整』。
② 使传送步进马达旋转,用数字万用表在 5 相步进驱动器上的『CP1』,『 CP2』端子之间测量。
数字万用表的连接方式为,『CP1』接“+”,『 CP2』接“-”。
③ 请缓慢旋转『RUN』可调电阻,使『CP1』~『CP2』之间的电压为 2.8±O.O1V。
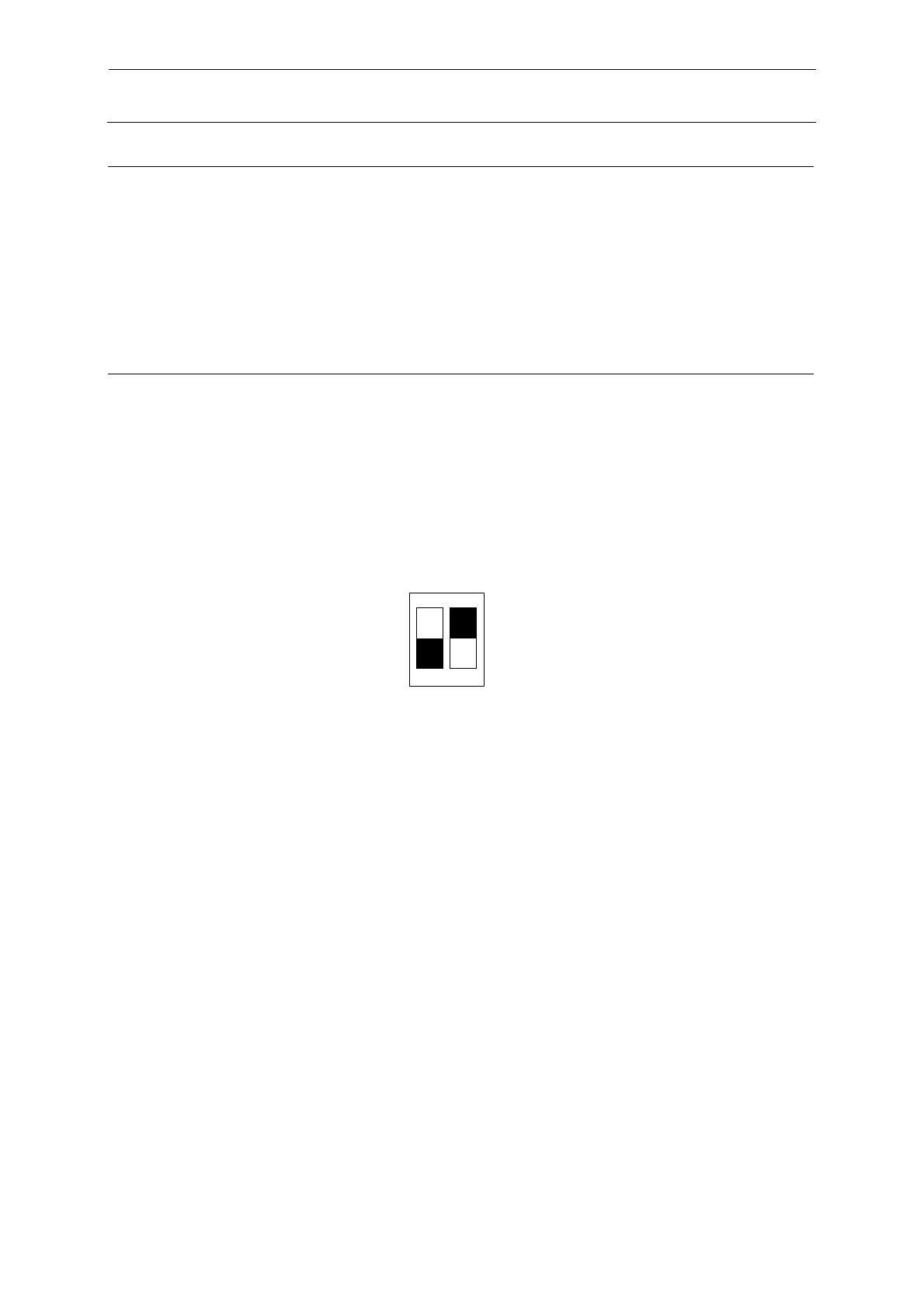
④ 请将步进驱动器上的 DIP SW 按照下图进行设定。
图 11-8-6-1-1 DIP SW 的设定
・规格值
驱动电流:1.4A±0.005A/相
(以 CP1-CP2 之间的电压测量。2.8V±0.01V)
1.OFF
2.ON
ON
1 2
CK
FH
维修调整要领书
11-47
11-9 SAFETY PCB ASM (40128872)
【功能】
SAFETY 基板的功能是,进行装置内的安全监视用各种传感器及操作用开关、信号塔等连接、
各种传感器及开关的状态监视及信号塔亮灯控制、护罩锁定等的电磁线圈控制。以及因 XY 轴
的紧急停止控制,向 XY 伺服放大器及POSITION BOARD 接收发送紧急停止信息及限位信息。
① X、YL、YR 限位传感器的监视
② 护罩打开传感器的监视
③ 操作开关(START/STOP/CONSOLE/KEY)的监视
④ 台架下降传感器的监视
⑤ 护罩锁定电磁线圈的控制
⑥ 信号塔的亮灯熄灭控制
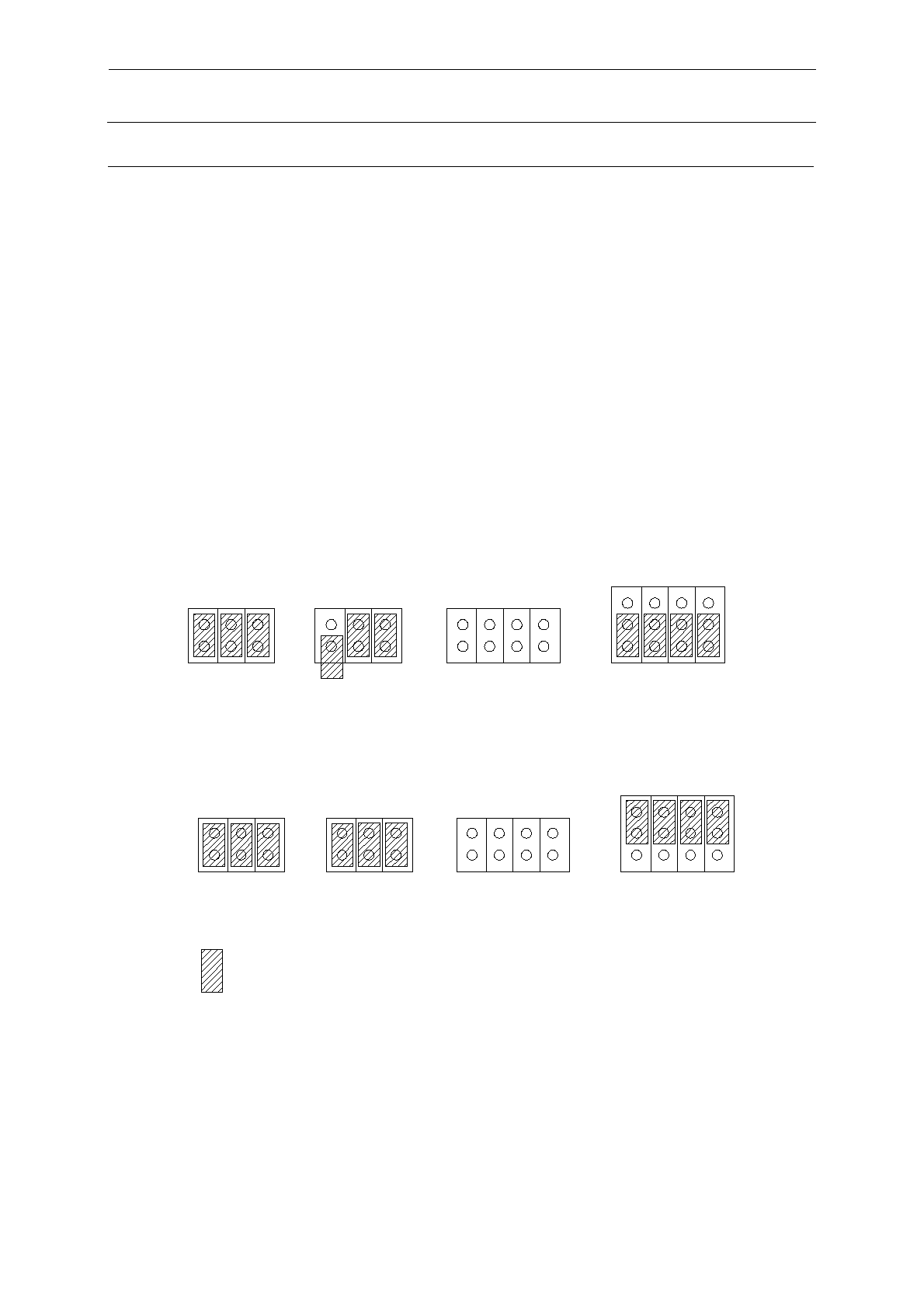
【短路针(跨接线)的设定】
ST 机设定为
EN 机设定
表示插座插入位置。
51
2 6
W1 W2
51
2 6
W4
71
4 10
93 6 12
W3
1
2
7
8
51
2 6
W1 W2
51
2 6
W4
71 4 10
93 6 12
W3
1
2
7
8